普通三维激光扫描仪成果的绝对定位方法
2022-10-13高海燕
高海燕 陈 真
(1.航天宏图信息技术股份有限公司,北京 100195;2.中兵勘察设计研究院有限公司,北京 100053)
0 引言
三维激光扫描获取的点云数据坐标系是扫描仪内部坐标系,即各站的坐标系是独立的。点云定位就是将点云从扫描仪内部局部坐标系转换到外部地理坐标系的过程,即点云地理化。
目前,架站式三维激光扫描仪应用最为广泛。工作时需要在待测区域的多个位置架设仪器采集点云,通常一个待测区域少则需要几个测站完成外业采集,多则需要几十站甚至上百站方可完成外业扫描,内业处理时需要将不同测站的点云通过一定的方式拼接成一个整体,同时,通常要进行定位和定向,即所谓的绝对定位。如采用三维激光扫描进行变形监测,就必须进行点云拼接和绝对定位。
传统的点云拼接和定位方法主要包括:(1)每个测站通过绝对坐标系下的控制点进行定位,将各个测站点云进行合并、优化处理即可拼接成一个整体;(2)通过标靶进行拼接;(3)在相邻测站的点云里,分别选择3个以上同名点进行拼接[1-6]。
在许多应用场合,点云配准技术对精确度的要求远远高于配准速度,本研究采用球形标靶,采用人工和自动化结合的工作方法,在考虑了配准速度的前提下,提高了点云配准精度。
1 点云绝对定位的方法
点云绝对定位是指将扫描获得的点云集(亦称点云模型、点云数据、点阵等)定位到一个预先定义的坐标系中,如大地坐标系。这个点云集既可以是单一测站的,也可以是若干测站经过配准连接的点云集。通过少量的几个控制点确定坐标变换关系,即可实现整个点云集的平移、旋转、缩放,将点云集精确统一到预定的坐标系下,以得到被测物体真实的空间位置、方向和尺度。事实上,点云绝对定位方法也可以用到两个扫描站之间点云模型的配准连接上。点云绝对定位的目的是将点云集纳入到预定的坐标系统中,以达到某种应用要求,例如将点云模型套合到地形背景或影像背景中,或者将不同时序中扫描获得的点云进行比较,以了解观测对象的空间位置或形态变化。
实现点云绝对定位的关键是通过最少3个同名点在两个坐标系中的坐标,建立点云集在两个坐标系之间的映射关系,实现点云集的坐标变换。实际上在点云数据中,如上所述显式的、严格意义上的同名点并不存在,无法直接选取同名点的坐标。因此,在进行点云绝对定位时,需要利用人工靶标,间接获取虚拟同名点坐标来实现点云的绝对定位。根据变换参数集的不同,可以把点云定位分为两大类:刚性定位和非刚性定位。一个刚性变换只包含平移、旋转和缩放,本文采用的点云绝对定位方法为刚性变换[7-12]。典型工作流程如图1所示。
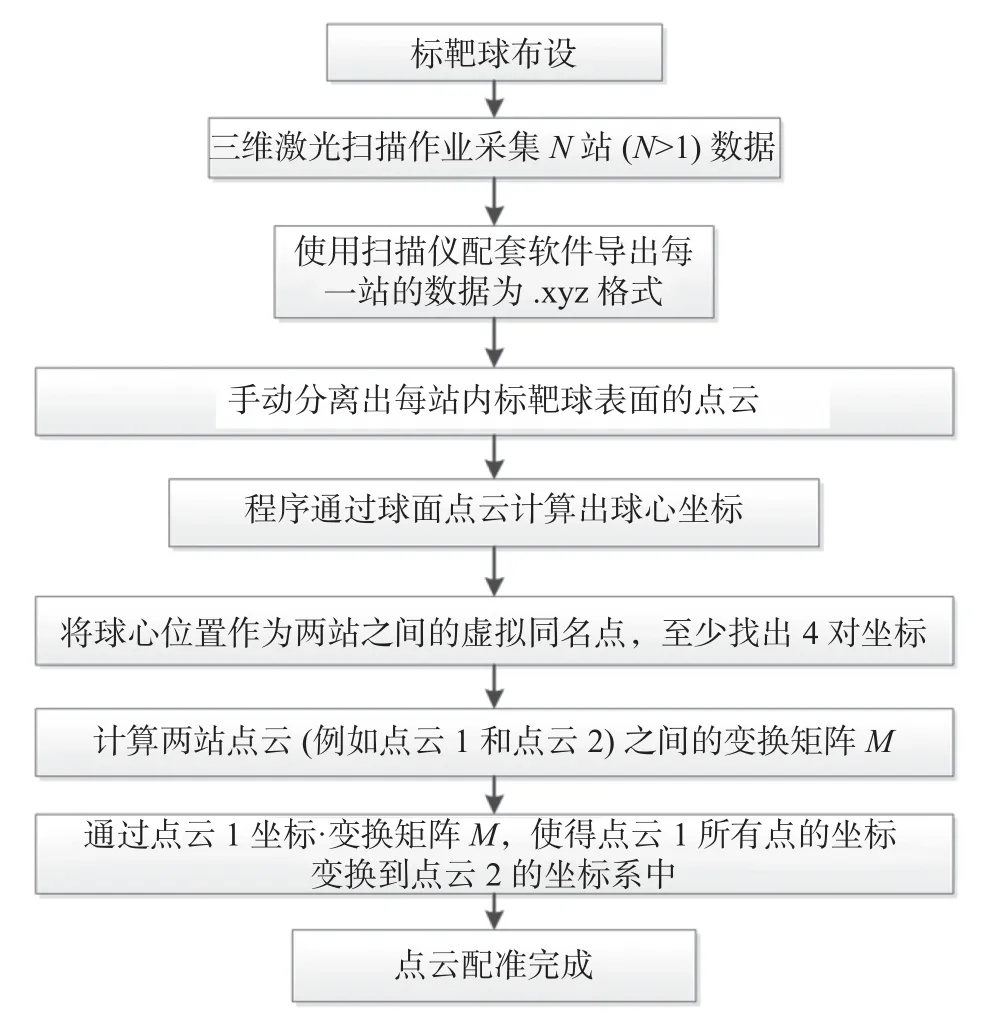
图1 三维激光扫描及点云定位(配准)作业流程图
上述作业流程图中,靶标是作为不同扫描站之间的点云集连接配准所需的同名点使用,因此,靶标的选择和布置对整体点云模型的精度很关键。人工布置的靶标通常有两类:球形靶标和平面靶标。球形靶标用在高精度要求场合,平面靶标用于低精度要求场合。理论上球形标靶为最佳,球体在任意方向对其扫描,都能保持形状和球心位置不变形,因此球形靶标定位精度最高。而平面靶标由于在不同站扫描的时候,会因为入射角度不同而导致精度有差异。另外,如上所述,扫描仪在不同站或不同次对同一个平面靶标的扫描点不可能落在同一个位置,因此难于获得精确的靶标中心位置的坐标,因而,一般只作为辅助靶标使用[13]。
2 实验验证
2.1 数据采集
使用FARO FocusS 350激光扫描仪作为实验仪器。FocusS 350是一款高速三维激光扫描仪,适用室内室外各种环境。扫描仪配套的软件是SCENE 7.1。本研究通过扫描室内环境进行数据采集,在阳台、办公桌、电脑机箱等处布置5个标靶球。通过改变测站位置,使用相同的扫描仪参数设置的情况下,扫描两站。两次扫描的数据通过SCENE软件导出为.xyz格式。分别命名为1.txt和2.txt。
2.2 数据抽稀
使用CloudCompare软件的点云抽稀功能,把点云1的点数抽稀为2000486个点,点云2的点数抽稀为2014063个点。
2.3 手动分离标靶球面的点云
使用CloudCompare软件的框选和剪切功能,从点云1和点云2中分别分离出4个标靶球的点云,要求分离的球面点云,尽量正对扫描仪的球弧面。
2.4 计算出标靶球球心坐标和半径
选择2.3步骤中分离出的球面点云,使用基于CloudCompare开发的中兵点云数据处理插件,计算出8个点云的球心坐标和半径(见表1)。
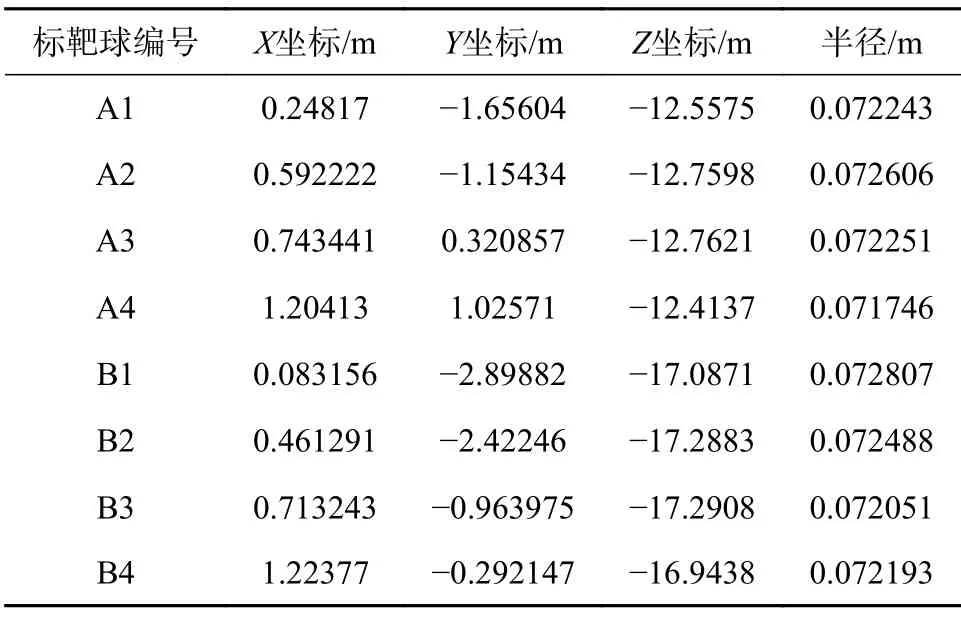
表1 标靶球球心坐标和半径
2.5 计算点云变换矩阵
使用表1中4对球心点(A1, B1)、(A2, B2)、(A3, B3)、(A4, B4)的坐标,使用矩阵公式,计算出两站间坐标系的变换矩阵M为:
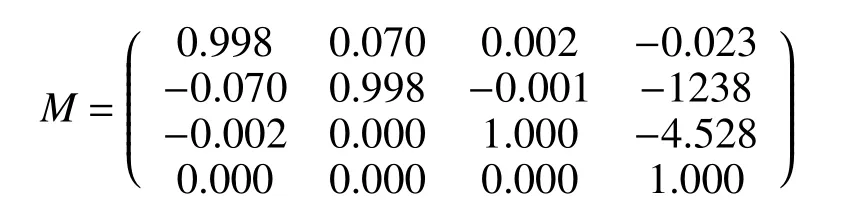
计算出变换矩阵M后,使用该转换矩阵转换目标点云,则完成点云定位到同一坐标系。
2.6 与高精度全站仪控制点的绝对定位
采用2.1-2.5同样的步骤,并把B1、B2、B3、B4的坐标换成全站仪控制点的坐标C1、C2、C3、C4,通过点对(A1, C1)、(A2, C2)、(A3, C3)、(A4,C4),可以实现把扫描仪的局部坐标变换到大地坐标系中,实现了普通三维激光扫描仪成果的绝对定位[14-15]。
3 实验结果
针对同样的点云数据,上述方法和在点云选择4对同名点(例如桌角)的方法进行对比,实验结果表明,本文的方法能显著提高点云定位的精度,两种定位方法的均方根(root mean square,RMS)对比结果如表2所示。
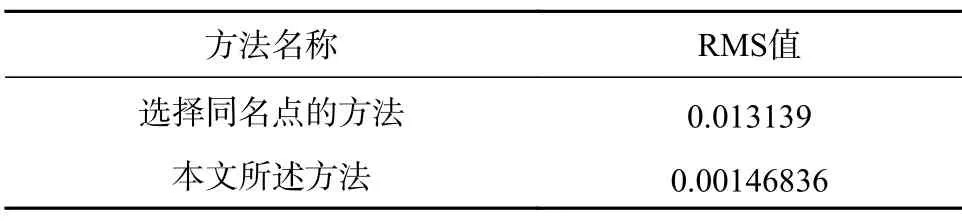
表2 两种方法对比结果表
4 结论
采用标靶球球心作为虚拟同名点的方法,实现了点云由局部坐标到大地坐标的精确变换,使用CloudCompare软件进行二次开发,编程实现了拟合计算标靶球球心坐标和半径,也实现了点云拼接和点云定位。实验证明此方法可以显著提高点云定位的精度。如何实现自动识别标靶球并提取球心坐标,实现自动定位特别是无人工标靶的自动定位,有待进一步研究。
