大气成分临边探测光谱仪摆镜控制系统设计
2022-10-13鲁晓峰曾议曹子昊鲁月林廖捷杨东上邱晓晗司福祺
鲁晓峰,曾议,曹子昊,鲁月林,廖捷,杨东上,邱晓晗,司福祺
(1 合肥学院生物食品与环境学院,安徽 合肥 230601;2 中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院环境光学与技术重点实验室,安徽 合肥 230031;3 中国科学技术大学,安徽 合肥 230026;4 安徽工程大学机械工程学院,安徽 芜湖 241000)
0 引言
随着人们对于环境问题的重视,大气污染的观测和预防也变得越来越重要。在大气污染治理过程中,需要对大气污染物的产生、分布和传输过程进行监测和分析。利用星载大气成分临边探测光谱仪定量监测全球/区域痕量污染气体成分(O3、NO2、HCHO和SO2等)的分布和变化,可以获取大气痕量气体高分辨率的水平分布与垂直廓线,进而研究在大气组成成分和全球污染变化中,人类活动排放和自然活动排放的影响。
太阳光经大气分子、气溶胶、云和地球表面的混合散射作用在地球外围形成了一个约100 km厚的临边大气层。临边观测是空间大气遥感的一种新型观测方式,它借助空间大气遥感仪器探测临边大气层的光谱辐射,通过分析临边大气层的光谱辐射特点,再根据反演算法从而得到O3、NO2等痕量气体以及大气气溶胶的高空垂直分布规律。大气成分探测仪通过反射镜扫描机构对沿地球某高度切线方向上的大气进行观测,接收来自仪器视线上大气层的一个条带内的散射辐射。
国际上关于一维扫描机构1999年美国发射的陆地卫星Landsat-7上载荷的摆镜机构采用的是步进电机搭配谐波减速器和21位高精度光电编码器的方案。该机构在轨推扫式扫描时,能够获取地面高分辨率的图像信息。其摆动周期为142.925 ms,摆动频率为6.997 Hz,转向时间为10.719 ms,摆镜的扫描速率可达2.21095 rad·s-1,摆动振幅为7.695°,测角精度达±15 μrad[1]。2001年法国地球观测卫星SPOT-5上的有效载荷HRG,它的轨道高度为822 km,其指向镜驱动结构采用步进电机为驱动器,搭配光栅编码器采集指向镜的角度位置信息。指向镜通过步进电机将360°细分成1200步,扫描的步进角为0.3°,地面分辨率达到2.5 m。二维光学扫描机构包括:用于天气预报的傅里叶变换成像光谱仪(GIFTS)指向镜,精度优于4′′;全球成像仪(GLI)万向扫描镜精度达到±0.08°,方位轴转动范围为±20°,最大速度为1.3(°)·s-1[2]。国内的研究有:西安光学精密机械研究所研制的月基光学天文望远镜,采用步进电机驱动,指向精度可达60′′。风云一号扫描机构采用磁滞同步电机,风云二号和风云三号采用步进电机驱动扫描镜。2013年我国发射的嫦娥三号搭载的二维转台,电机采用的是四相步进电机,俯仰轴的扫描范围为-0.4°~+0.4°,方位轴为±50°,扫描的精度为0.1°。2016年我国发射的量子号科学实验卫星搭载的二维摆镜,采用的是两套独立的转动机构,扫描精度小于3.5 μrad。
当前摆镜驱动方案主要有两种:一是利用步进电机经减速器减速后驱动摆镜,编码器作为位置传感器提供位置反馈信号。二是利用有限转角力矩电机作为驱动机构,旋转变压器提供位置反馈信号,通过位置环与速度环双闭环控制。本文通过对大气成分临边探测光谱仪的成像需求分析,对扫描机构的指标进行设计,对扫描机构转动的精度进行测试记录。选择有限转角无刷力矩电机搭配以光电编码器作为位置传感器的控制系统。该系统以STM32F103为控制核心,有限转角直流无刷力矩电机为驱动部件,利用光电编码器,DRV8833C电机驱动芯片,实现对摆镜的指向精度控制。
1 转动角要求
摆镜的性能指标有光学性能要求、机械性能要求和运动性能要求。在摆镜控制系统设计中,主要对摆镜的运动性能进行测试,其中包括步进角、指向精度、稳定性、摆镜机构的转动范围等。摆镜控制系统性能的优劣取决于步进角精度、指向精度、稳定性等指标[3]。
星载大气成分临边探测光谱仪依次在不同的切高扫描,分别从水平方位和垂直高度两个方向观测大气。垂直方向一维扫描和离轴三反望远镜组合,实现像方远心的前置光学系统。该光谱仪光路系统及临边观测原理分别如图1和图2所示,摆镜把地球紫外到可见光反射进入光学扫描系统,通过离轴三反镜入射到光谱仪的入射狭缝,然后再通过成像光谱仪色散后成像到面阵CCD上,以获得高光谱分辨率、高空间分辨率的光学信息。临边摆镜采用一维摆扫方式工作,扫描镜在轨扫描角度范围约为(切高方向:10~50 km)-0.4°~+0.4°,指向精度为角秒级,此模式为大气成分探测仪的正常观测模式。

图1 光谱仪光路流程图Fig.1 Flow chart of spectrometer optical system
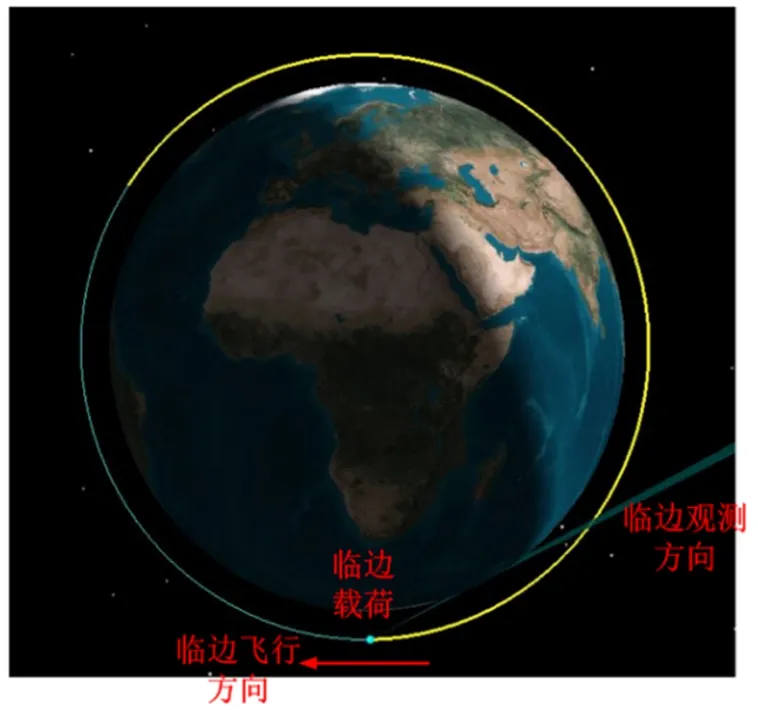
图2 临边观测原理图Fig.2 Principle of limb observation
2 系统组成部分
摆镜控制系统主要包括硬件电路系统设计和软件系统设计两部分。硬件实现对摆镜的驱动,软件实现对摆镜位置的精确控制,通过高精度位置传感器反馈的位置数据对电机的角度偏差进行调整,控制芯片对采集的数据进行分析处理,通过比例、积分和微分控制(PID)输出不同占空比的脉宽调制(PWM)控制电机绕组内电流的变化,消除转动偏差。系统组成如图3所示。
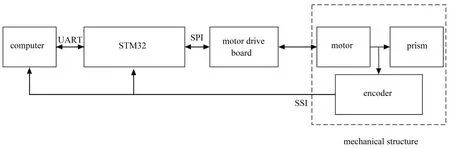
图3 系统组成Fig.3 System component
2.1 驱动部件
电机作为探测仪的驱动部件,需要分析电机的指标要求。指向转动过程主要分为匀速阶、匀减速、匀加速三个阶段,并且要求在一定活动范围内,因此选择有限转角力矩电机。步进电机一般搭配减速器形成间接驱动,转动扫描精度会受到减速器传动精度的影响,在速度变化范围、控制进度等方面不如闭环控制的直接驱动的直流无刷电机;永磁同步电机的控制方式较为复杂,在工作中会占用更多的控制器资源,增加系统能耗;有限转角直流无刷力矩电机的转动角度是在一定范围内,并且阻尼不同,不需要齿轮等机械结构啮合,直接与负载的摆镜相连,体积更小,结构简单,易于控制,并且力矩电机在有限转动范围内的力矩波动比一般的直流无刷电机小[4]。本系统选用的电机转动力矩大于3,寿命周期大于8年(2×106r),重量为0.34 kg,输出扭矩480 g·cm。
2.2 DRV8833C电机驱动器
本设计采用DRV8833C双H桥电机驱动器,其工作在PWM模式输入下,一对N沟道和P沟道MOSFET组成H桥电路,其电路可以调节电机绕组电流,具有一种低功耗的休眠模式,电压范围为2.7~5.8 V[5]。xIN1、xIN2引脚输入PWM信号,控制xOUT1、xOUT2的电压输出,通过两路PWM信号的输入控制电机正反转。电机控制逻辑如表1所示,控制原理如图4所示。
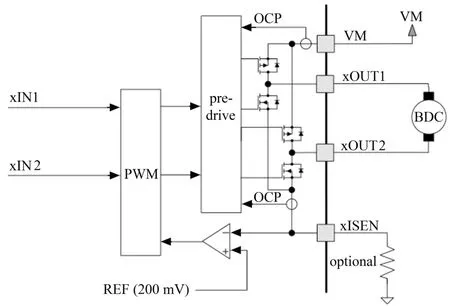
图4 控制原理图Fig.4 Diagram of control schematic
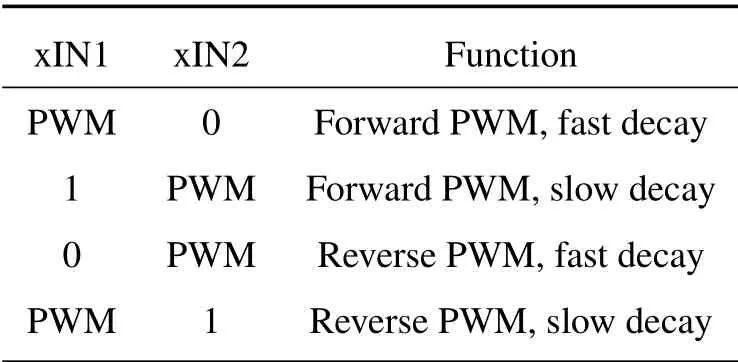
表1 电机控制逻辑Table 1 Motor control logic
2.3 位置反馈信息采集
角位置传感器用来实时检测转动的角度位置信息,电机的转速通过角度位置信息计算得出。该控制系统选用18位单圈绝对值编码器,该编码器共有18位数据位,其中0到17位为有效数据位。编码器和STM32之间通过同步串行接口(SSI)协议进行数据的传输,SSI需要一根数据线和一根时钟线,编码器数据采集时钟选择MCU的系统时钟,同时分别将STM32两个引脚配置成输入模式和输出模式。时钟信号由接收端设置,编码器的位置由接收设备的时钟信号触发,从格雷码高位(MSB)开始,输出与时钟信号同步的串行信号。以编码器的总位数输出N个中断脉冲,当传送信号停止时,时钟和数据位均是高位,在时钟信号的第一个下降沿,当前值开始贮存,从时钟信号上升沿开始,数据信号开始传送,一个时钟脉冲同步一位数据。接收到的位置信号是格雷码形式,再通过软件将格雷码转化成二进制代码,方便微控制器读取计算;编码器数据格式如图5所示。
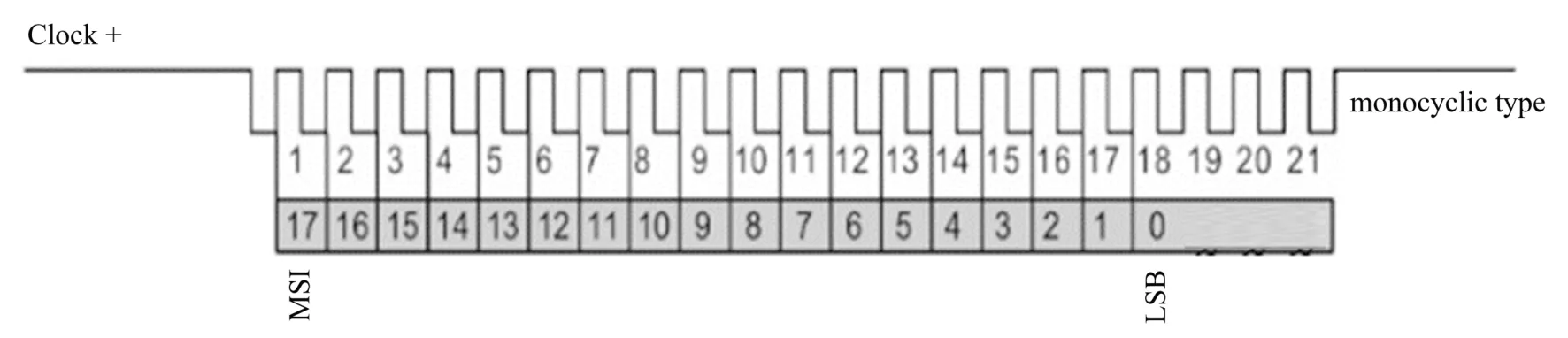
图5 编码器数据格式Fig.5 Encoder data format
3 软件结构设计
软件设计是本系统设计的重点,它决定着系统的整体性能。软件系统设计包括主程序和位置环子程序的设计。主程序执行系统的初始化和变量初始化,其流程如图6所示。位置环程序根据光电编码器测得的反射镜角度数据值对电机进行调节[6]。微控制器接收并读取摆镜的当前角度值,与设定的角度值进行比较,经过PID运算后,输出PWM信号到DRV8833C电机驱动模块,调节反射镜位置,消除摆镜位置偏差。光电编码器的反馈信号均使用中断服务程序来实现,设定的角度信息通过上位机输入系统[7]。STM32程序基于Keil软件平台利用C语言进行编写,这样在功能性、结构性、可维护性上具有明显的优势。基于QT编写的上位机软件与STM32进行通信,通过上位机软件给定电机转动值,观察读取编码器值[8]。上位机界面如图7所示。
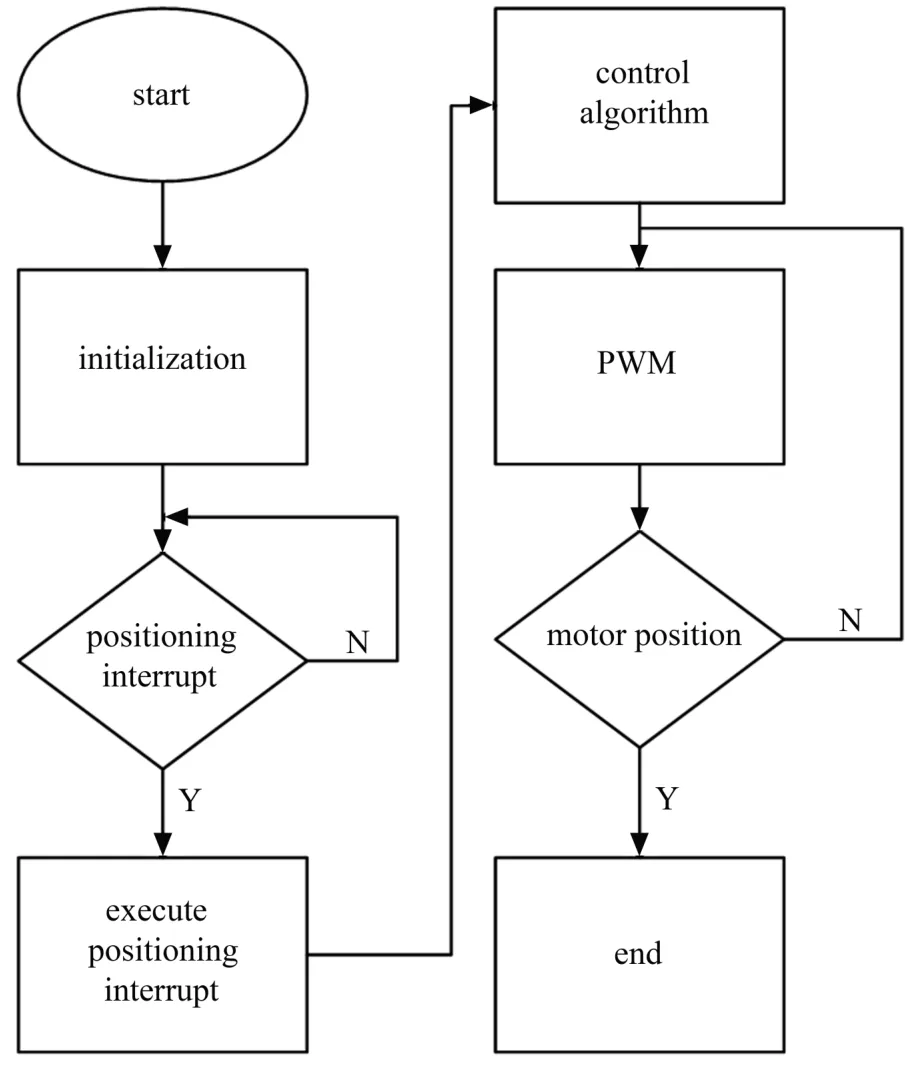
图6 主程序流程图Fig.6 Flow chart of main program
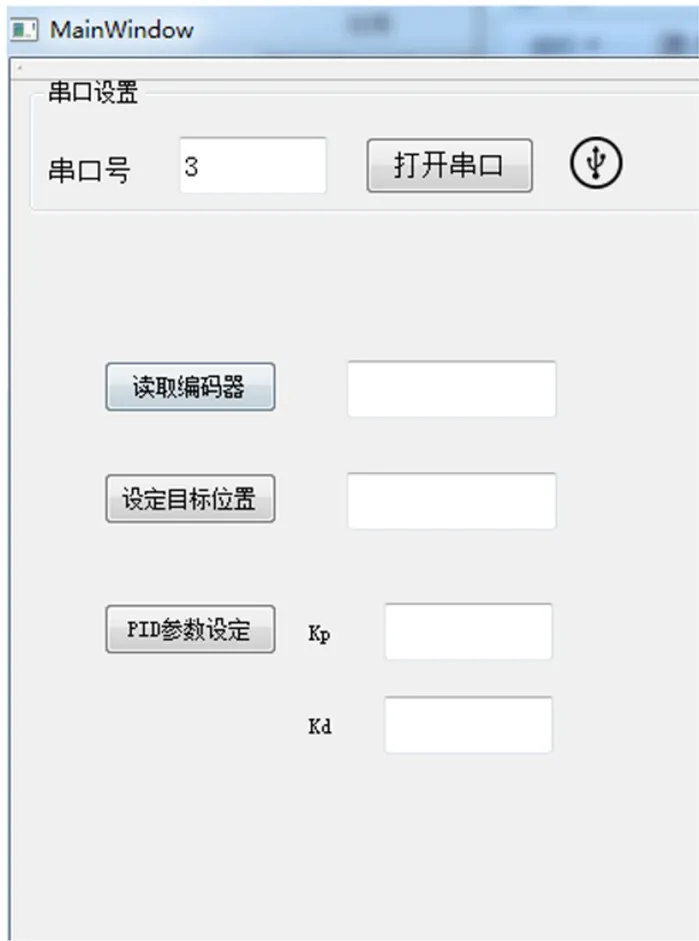
图7 上位机界面Fig.7 Interface of host computer
4 实验结果及分析
为了验证设计的系统性能,搭建了实验平台(图8)对控制系统的指向精度进行了测试。电脑端上位机向电机控制电路发送电机控制指令,控制摆镜的转动。为避免摆镜转动时的失步,在设计中,设定占空比为50%的脉冲信号,然后利用光电自准直仪对摆镜实际转动的角度信息进行测量[9]。
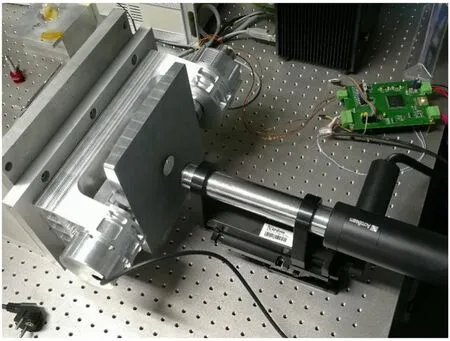
图8 测试平台Fig.8 Testing platform
给系统和控制板上电后,系统开始工作,测试电机指向精度。从摆镜的起始点出发,进行多组试验,每组试验间隔相同角度,多次测量系统的指向精度。具体测量方法为:以零点为起点,每次前进100′′,测量实际角度值,计算和理论角度值的误差,共测试10组指向精度,结果如表2所示。
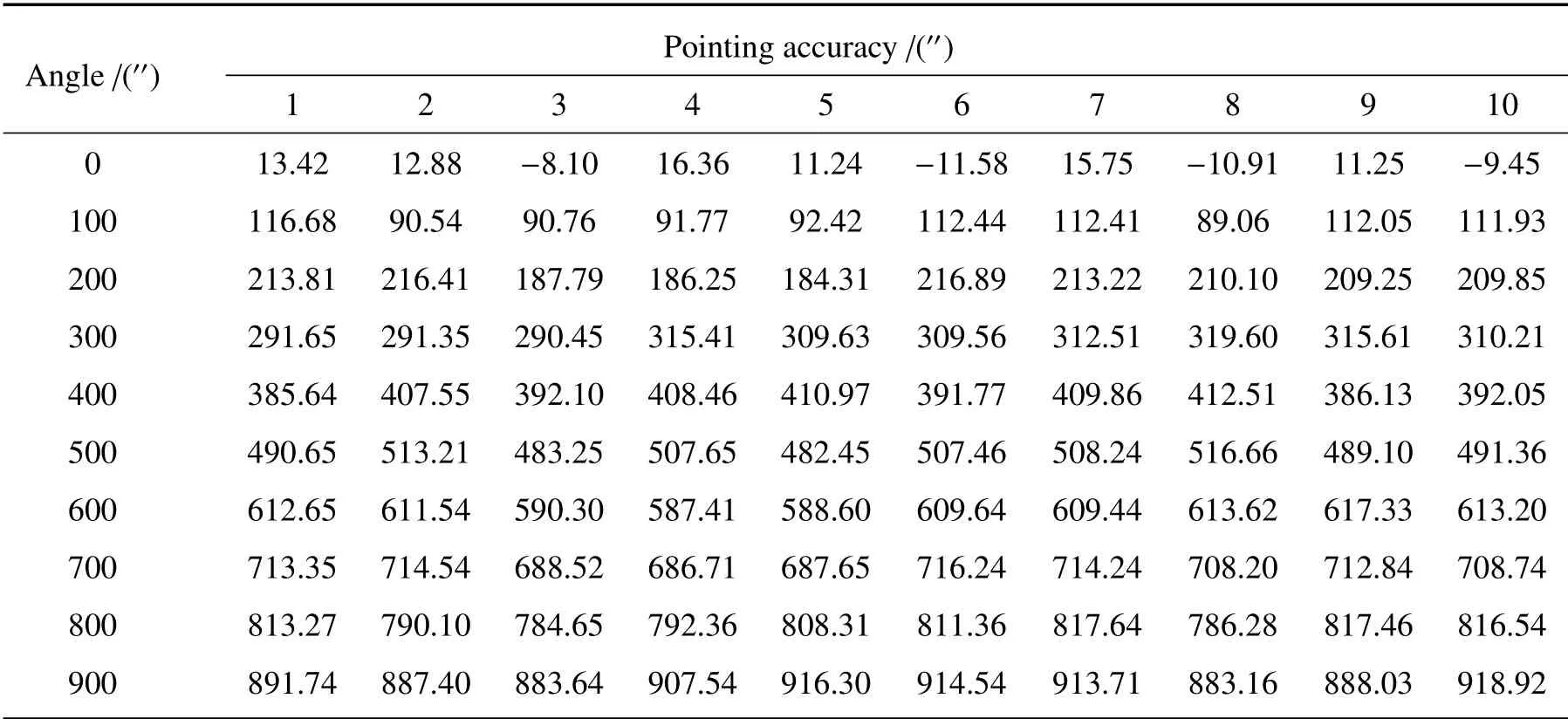
表2 指向精度测试试验结果Table 2 Results of pointing accuracy test
由上述表格数据可知电机在测试时从0°开始,每次转动相同角度100′′,测量电机实际位置。共进行了10组测试,根据测试数据计算指向精度偏差(绝对值)如表3所示,其中角度最大偏差为19.6′′,最小偏差为7.46′′,总的平均偏差为12.15′′,满足控制系统指向精度δ<20′′的设计指标。各个角度所测多组数据的标准差的计算公式为
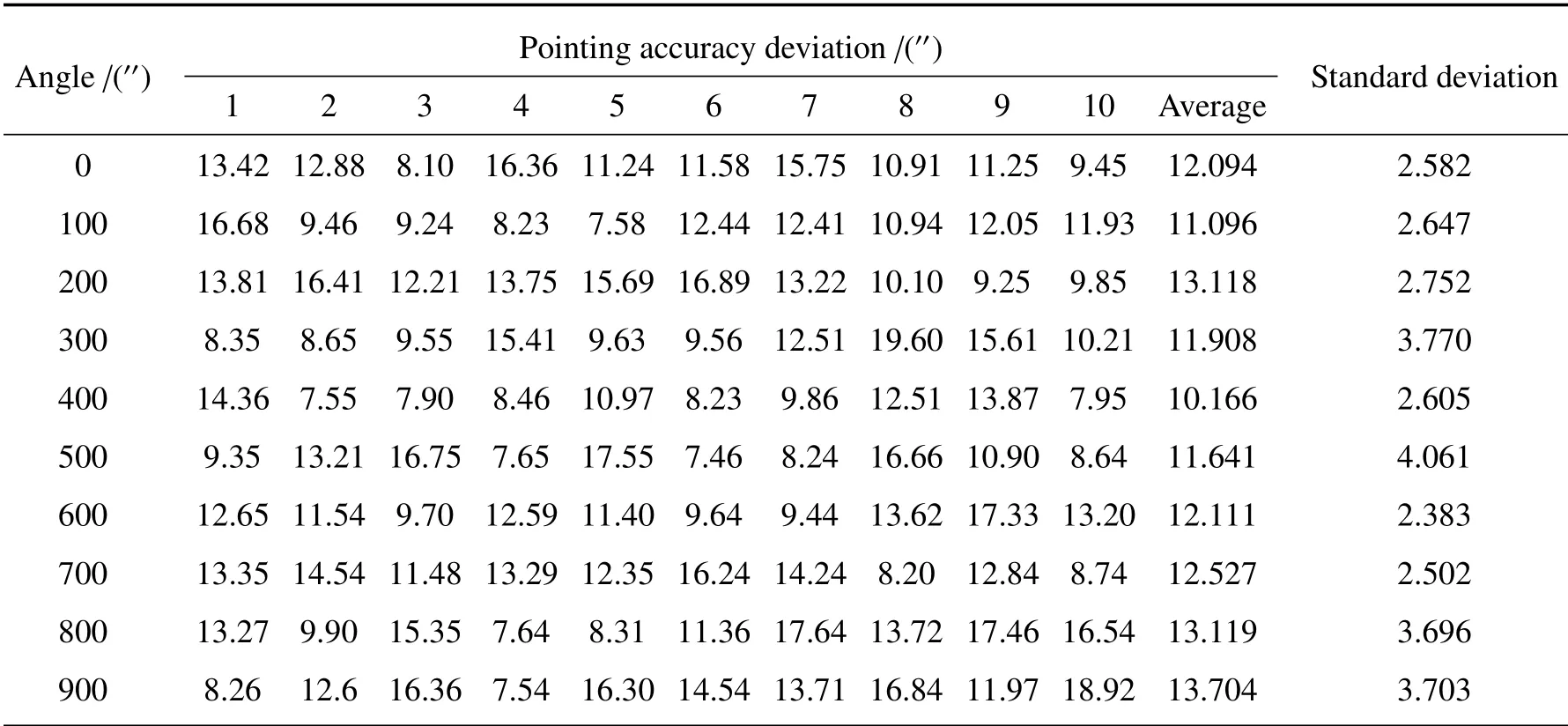
表3 指向精度偏差Table 3 Pointing accuracy deviation value

式中N为测试组数,Xi为偏差值,μ为平均偏差。从结果可知,最大标准差为4.06,最小标准差为2.38,多次测量的一致性较好。
5 结论
设计了基于直流力矩的电机摆镜控制系统,搭建试验平台,对摆镜系统的性能进行了测试,测得指向精度小于12.15′′,初步满足了星载大气成分临边探测光谱仪对摆镜高精度指向的要求,达到了在地面模拟验证扫描方向上光谱数据采集的目的。影响系统精度的因素有很多,如轴承间的机械摩擦、机械结构的加工精度、电机本身的工艺水平、软件算法控制的优化、使用环境等。设计的控制系统在精度上有待提高,后续将对控制算法作进一步优化。