基于Adams离散和Newmark-β法求解分数阶van der Pol系统*
2022-10-13姜宏杰刘祚秋吕中荣刘广
姜宏杰,刘祚秋,吕中荣,刘广
中山大学航空航天学院,广东 广州 510006
与整数阶导数相比,分数阶导数具有方程简洁和参数意义明确等优点,通过分数阶微分系统描述的现象更加接近于真实的自然现象,因此分数阶导数在非线性振动[1]、控制理论[2]、参数识别[3-5]等领域有广泛的应用。vdP(van der Pol)系统[6]最初是荷兰工程师Balthazar van der Pol在研究三极管的振荡效应中提出的。作为一种典型的自激系统,其在不同的参数条件下能够展现出多种丰富的动力学现象,因此基于vdP系统的研究产生了众多的学术成果。
目前,学者们也针对含分数阶导数的vdP 系统进行了研究。Barbosa 等[7]通过分析分数阶vdP 系统的相图、分岔图以及借谱分析等,较为详细地研究了分数阶vdP 振动系统在时域和频域的动力学行为;Tavazoei 研究了分数阶vdP 系统的极限环与初始条件的关系,并给出了存在极限环的解析判据;Chen 等[8]用相轨迹图和庞加莱映射研究了分数阶vdP系统的混沌动力学行为,发现分数阶阶次会直接导致系统进入混沌状态。毛北行等[9]基于Lyapunov稳定性理论给出了分数阶Duffling-van der Pol系统混沌同步问题的两个充分性条件。韦鹏等[10]以含分数阶vdP 系统为对象,研究了其超谐共振时的动力学特性,得到了超谐共振周期响应的稳定性判断准则,同时提出等效非线性阻尼和非线性稳定性条件参数的概念。
上述是从定性角度来描述和分析分数阶vdP系统的各种性质,定量的研究则需要获取系统较为精确的数值解或解析/半解析解[11-12]。和整数阶非线性系统不同的是,分数阶微分算子的引入使得系统的解析/半解析解的求解难度急剧上升,相关的成果非常少。所以,现阶段我们更加关注分数阶vdP 系统的数值求解。对于整数阶非线性系统,数值计算法包括有限差分法[13]、Runge-Kutta 法[14]、精细积分法[15]、预估校正法[16]等。对于分数阶微分系统,即便是数值方法也尚在发展当中。
Newmark-β法是一种非常成熟的数值方法,它是基于ti时刻的运动状态ui、u˙i、u¨i,然后进一步计算ti+1时刻状态,逐步获得结构动力响应的逐步积分法。Newmark-β法通过简单的参数设置便可以无条件稳定,且编程简单易于实现,这些特点使其在整数阶微分系统中得到了广泛应用。在本文中,我们将基于Adams离散,提出一种针对Caputo分数阶导数的离散格式,然后进一步基于Newmark-β法构造出完整的逐步迭代格式,最后通过Newton-Raphson迭代[17]来进一步求得分数阶vdP系统的响应。
1 基于Adams离散和Newmark-β法的迭代格式
1.1 对分数阶算子Dαx进行Adams离散
对于如下形式的分数阶vdP方程[18]

其中μ为阻尼系数,Dαx表示分数阶微分算子,α为对应的分数阶阶次。分数阶导数Dαx通常有Riemann-Liouvill 定义、Caputo 定义和Grünwald-Letnikov 定义[19-21]。本文中,分数阶算子Dαx采用Caputo 定义[22]。当分数阶次0 <α<1时,有[23]
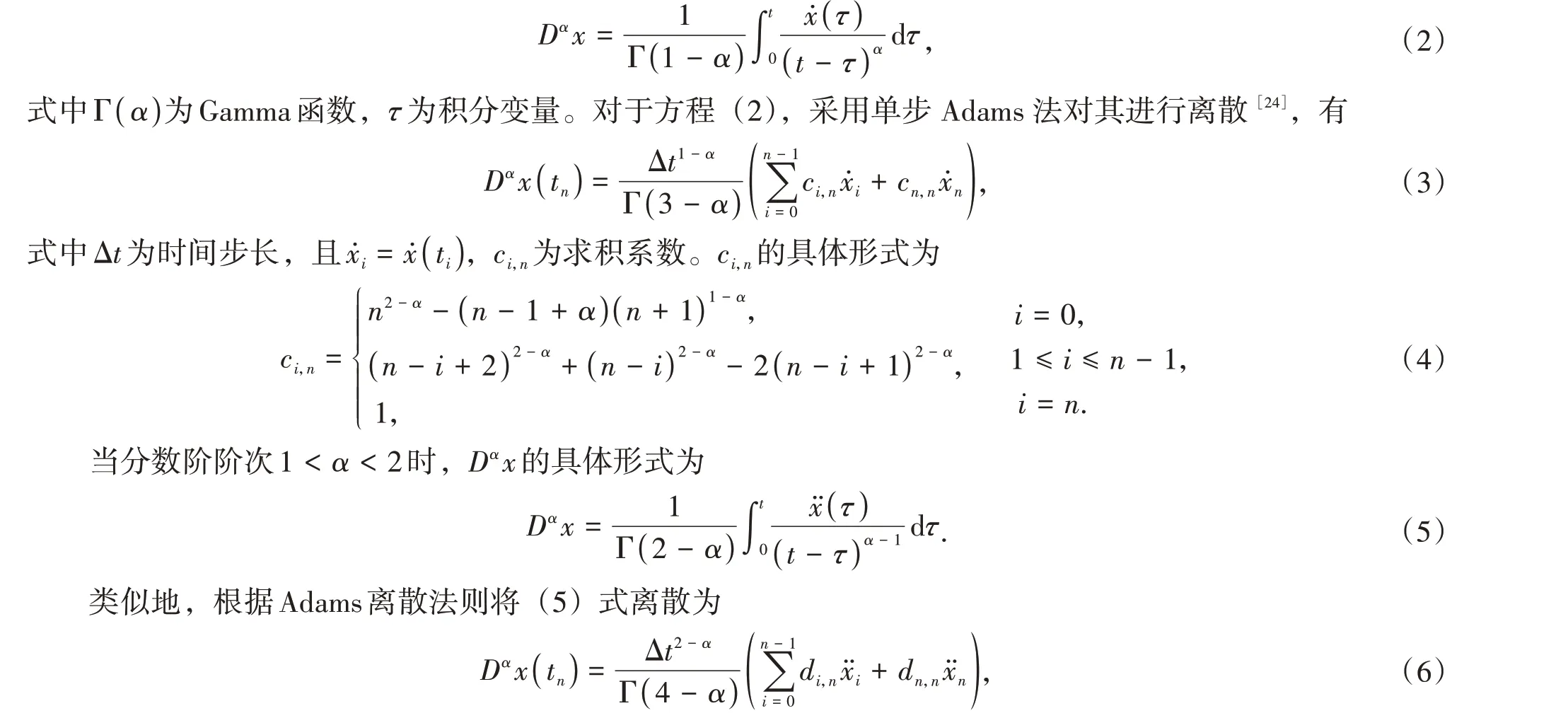
其中求积系数di,n为

1.2 结合Newmark-β法的逐步迭代格式
当分数阶阶次α= 0.5时,分数阶vdP系统可以被完整地表示为

式中β和γ为Newmark-β法的控制参数,Δt=tn-tn-1为时间步长。进一步,将方程(10)中的状态变量代入到方程(9)中,可以得到系统(8)的完整迭代格式
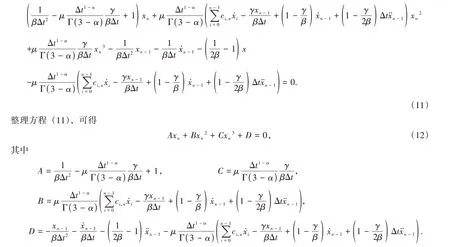
可以看出,系数A、B、C、D是通过β、γ、tn、α等表示的常数,则方程(12)是关于tn时刻未知位移xn的非线性代数方程。
1.3 通过Newton-Raphson迭代法求解位移方程
方程(12)可以通过Newton-Raphson 迭代法来求解。Newton-Raphson 迭代本质上是将非线性方程f(x) = 0 进行泰勒展开,并保留一阶项得到线性化方程来寻求方程f(x) = 0 的根。对于方程(12),有f(xn) =Axn+Bxn2+Cxn3+D= 0,则f(xn)的泰勒展开为

对于足够小的δ,忽略二阶及以上的项,可得

需要注意的是,通过Newton-Raphson 迭代求解xn,需要选取一个合适的初值[26]。通常选取上一时刻tn-1的位移xn-1作为下一时刻的迭代初值。获得位移xn后,将其代入方程(10),得到系统的速度和加速度。自此,系统在tn时刻所有的状态变量全部获得。重复多次,就可获得分数阶vdP 系统完整的时程响应。
2 数值算例
2.1 0 < α < 1的分数阶vdP系统
首先假定分数阶阶次α= 0.5,即以系统(8)为例,取参数μ= 0.8.Newmark-β法中的参数取值为β=0.25、γ= 0.5. 由初始条件x0= 0,x˙0= 1可以计算出x¨0,进一步计算获得t1的系数A、B、C和D,然后逐步获得系统的数值响应。图1为α= 0.5时系统(8)的时程响应,图2是对应的相图。
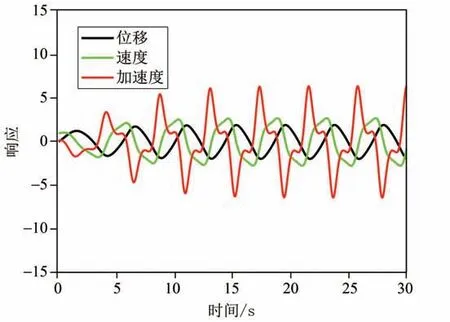
图1 系统(8)的时程响应Fig.1 The time histories of system(8)

图2 系统(8)的相图Fig.2 Phase diagram of system(8)
由图1可以看出,在最初的15 s内,系统出现了瞬态响应,但是逐渐地系统进入稳态响应,对应的相图则出现了稳定的极限环。这说明本文所提的数值方法不会出现失稳现象,可以稳定获得系统的数值响应。当分数阶阶次α→1时,系统(8)将会退化为对应的整数阶vdP系统,即

通过整数阶的数值方法验证本文所提方法的有效性。当α= 1 时,四阶Runge-Kutta(RK)法和本文所提方法获得的时程曲线和相图,如图3所示。从图中可以看出,无论是时程曲线还是相图,两种方法获取的结果吻合很好。这证明本文的方法对于整数阶微分系统仍旧是有效的。
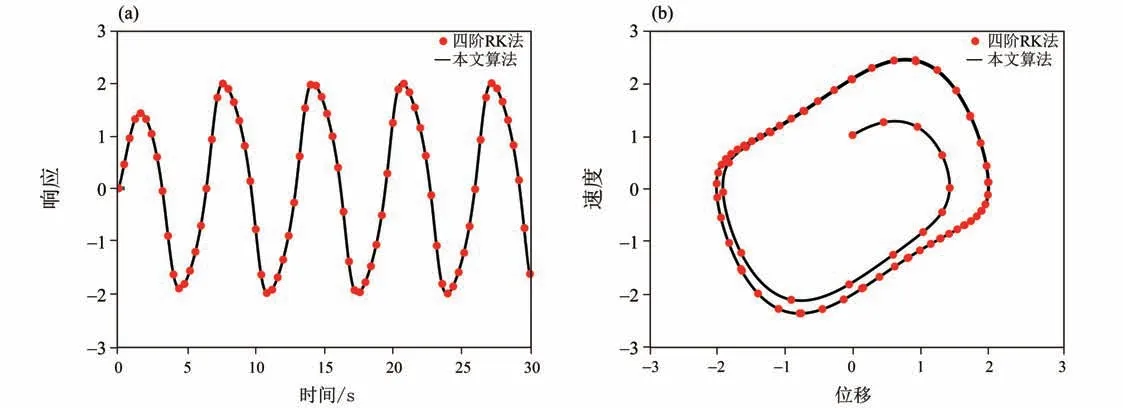
图3 α = 1时,四阶RK法和本文算法的时程曲线(a)和相图(b)Fig.3 The time histories(a)and phase(b)obtained by fourth-order RK method and the algorithm of this paper when α = 1
2.2 1 < α < 2的分数阶vdP系统
不失一般性,可以假定系统(1)中的分数阶阶次α= 1.5,μ= 0.8. 则系统(1)有如下形式

与α= 0.5的讨论类似,结合Adams离散和Newmark-β法,可以得到系统(17)的逐步迭代格式
与上一个算例类似,在tn时刻系数A′,B′,C′和D′也是β、γ、tn、α表示的常数,则方程(19)是关于未知位移xn的非线性代数方程。将xn代入方程(10)得到系统的速度与加速度。
本算例中,Newmark-β法中的参数取值与2.1节相同,时间步长取Δt= 0.1.α= 1.5时,系统(17)的时程响应和相图,如图4和图5所示。
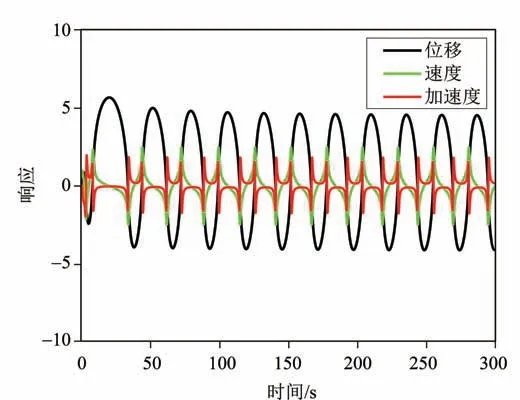
图4 系统(17)的时程曲线Fig.4 The time histories of system(17)

图5 系统(17)的相图Fig.5 Phase diagram of system(17)
从图4所示的时间历程可以看出,由于初始状态的影响,系统出现了瞬态响应,经过一段时间后才进入稳态。且,由于本算例中α= 1.5,其时程曲线与α= 0.5时明显不同,相图也有明显的区别。此外,α=1.5对应的响应频率比α= 0.5时要小得多。同样,当分数阶阶次α→2时,系统(17)也会退化为对应的整数阶vdP系统。
α= 2时,四阶RK 法和本文所提方法获得的时程曲线和相图,如图6所示。从图6可以看到,本文方法和四阶RK 法的结果吻合非常好。对比图4和图6(a),可以发现α= 1.5和α= 2时vdP 系统的响应完全不同;对于α= 1.5 的分数阶vdP 系统,系统的速度和加速度都存在明显的尖峰。对比图5 和图6(b),可以发现α= 1.5对应的相图更接近于一个方形,而α= 2时的相图则是一个椭圆。同样的,本文所提的离散格式和数值方法也可以很好地求解1 <α<2的分数阶vdP系统。
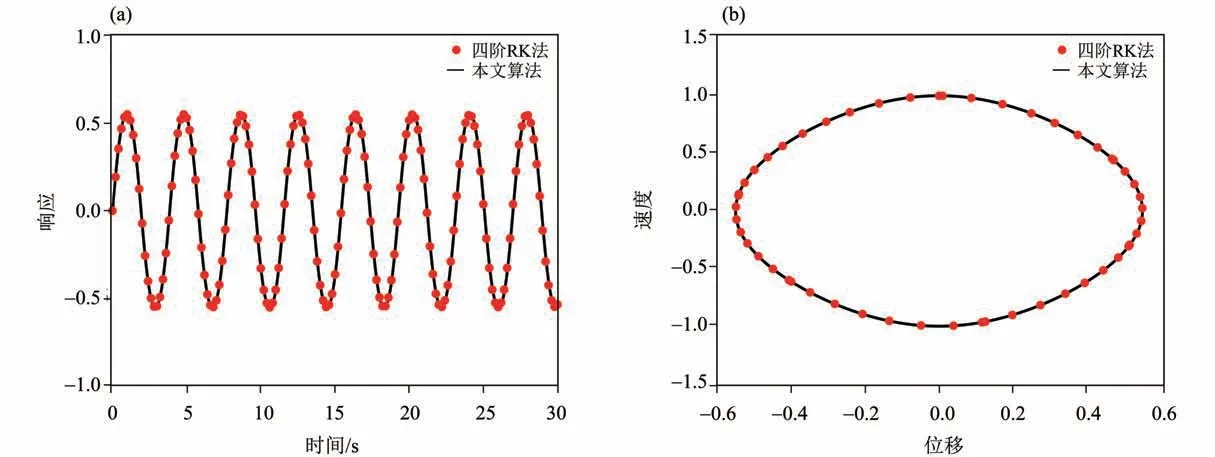
图6 α = 2时,四阶RK法和本文算法的时程曲线(a)和相图(b)Fig.6 The time histories and phase obtained by fourth-order RK method (a)and the algorithm of this paper (b)when α = 2
3 结 论
本文基于Adams离散和Newmark-β法,提出了一种求解分数阶van der Pol系统的逐步迭代格式,并分别讨论了0 <α<1 和1 <α<2 对应的vdP 系统的数值求解。结果表明,本文所提方法可以稳定获得分数阶微分系统的数值解。此外,我们还讨论了α→1和α→2时,即分数阶vdP 系统退化为整数阶vdP 系统时的情形。结果表明,本文所提算法和四阶RK法获得的结果吻合非常好。原则上,本文所提的迭代格式适用于其他类型的分数阶微分系统。
