串联式和增程式混合动力轻型商用车的性能对比
2022-10-11李敏清韩志玉
李敏清,冯 坚,韩志玉
(同济大学 汽车学院,上海 201804,中国)
随着汽车技术向低碳化、信息化、智能化发展,混合动力汽车已经成为中国汽车产业发展的主要技术方向之一[1]。
在混合动力汽车中,增程式电动汽车(rangeextender electric vehicle,REEV)和串联式电动汽车(series hybrid electric vehicle,SHEV)由于其高效、节能、结构简单等特点,在乘用车领域得到广泛应用。REEV 和SHEV 均属于串联构型,两者的差异在于REEV 的电池可以外接充电,属于插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV),SHEV 则属于传统混合动力汽车(hybrid electric vehicle,HEV)。REEV 可以利用外部电网电能,有效降低车辆的燃油消耗量及温室气体排放[2],而SHEV 较小的电池容量降低了整车的整备质量及制造成本[3]。有研究表明,REEV 相较于SHEV 在燃油经济性和排放上的优势在工况的行驶里程较长时会减弱[4]。因此,在选择整车系统方案时,需要结合使用场景和车型综合考虑。
目前,许多研究人员对不同混合动力构型在不同场景、不同策略下的燃油经济性、排放性、使用成本等进行了比较研究[5-8]。F.Vincent 等[7]对一款中型轿车的串联、并联和功率分流3 种构型在2 种纯电续驶里程方案下的燃油经济性进行对比;文献[9]研究了串联和并联PHEV 的“从油井到车轮”(well-to-wheel,WTW)二氧化碳排放。虽然相关研究取得了一定进展,但是针对乘用车型较多,商用车型的研究较少;针对PHEV不同构型的研究较多,在同一构型下比较PHEV与HEV 性能的较少。
能量管理策略(energy management strategies,EMS)也是影响混合动力汽车实现节油减排的关键技术之一[10],不同的构型所适用的能量管理策略不同[5]。在进行不同动力系统方案对比时,为了公平性应当首先选定各自油耗、排放最优策略。REEV 和SHEV 的能量管理策略存在明显的差异性,REEV 存在电量消耗、电量维持(charge-depleting charge-sustaining,CD-CS)模式和混合模式(blended mode),SHEV 只有CS 模式。许多研究表明,PHEV 在混合模式下可以有效地提高燃油经济性[4,11-12]。然而目前PHEV 和HEV 性能比较研究中,仍旧使用规则式策略(rule-based strategies,RB)使PHEV 运行于CD-CS 模式,未充分利用其节油优势。有些研究虽然分别针对PHEV 和HEV 进行策略的优化,所用策略的实时性和工程可用性却难以实现[4,13-14]。
本文旨在比较增程式(REEV)和串联式(SHEV)车辆使用端的油耗和二氧化碳排放差异,并且充分考虑比较的公平性和策略的实时性。以一款日行150 km、满载质量4.5 t 的轻型箱式卡车为研究对象,采用2 款1.2 L 和1.5 L 量产发动机进行仿真。将一种动态等效燃油消耗最小策略(dynamic equivalent consumption minimization strategy,DECMS)应用于此类商用车型,并与规则式策略(RB)进行了比较。对DECMS在SHEV 车型上难以适用的问题,提出了改进的混合DECMS 策略(mixed DECMS,M-DECMS)从而获得更佳的结果。为2 款车型选择了油耗结果最优的策略,并在各自最优策略下比较了燃油消耗和二氧化碳排放差异,为企业整车开发提供性能数据参考。
1 动力系统和数学模型
本文应用AVL Cruise 软件,建立了增程式和串联式的整车纵向动力学模型,并利用MATLAB/Simulink将能量管理策略模型以动态链接库的形式集成到AVL Cruise 中。本文的研究对象为一辆满载质量为4.5 T 增程式轻型商用厢式卡车,车辆的滑行阻力曲线通过试验法获得。
增程式(REEV)和串联式(SHEV)动力系统主要包括发动机、启动发电一体机(integrated starter and generator,ISG)、电池、驱动电机(traction motor,TM)、主减速器等,其中发动机与ISG 电机构成的辅助动力单元(auxiliary power unit,APU)通常处于发电状态,是决定整车油耗的关键。启动发电一体机(ISG)和驱动电机(TM)均为永磁同步电机。本文选用1.2 L和1.5 L 排量发动机,分别与2 种ISG 电机匹配,同一发动机下REEV 和SHEV 2 种车型在硬件方面的唯一的差别在于电池类型和性能参数,具体的动力部件参数见表1。

表1 关键动力部件参数
本研究中发动机采用准稳态模型计算发动机燃油消耗量,发动机比油耗be通过万有特性曲线获得,发动机瞬时燃油消耗量公式为

启动发电一体机(ISG)和驱动电机(TM)的能耗通过公式(2)计算得到。

其中:下标“i”代表ISG 或TM;Pi为电机功率;Ti为电机扭矩;ni为电机转速;ηi为电机效率;C含义同式(1),为转换系数;Ti≥0 时电机处于驱动模式,Ti<0 时电机处于发电模式。
在仿真中,发动机(ICE)、ISG 和TM 的扭矩响应特性如公式(3)所示(来自AVL Cruise 用户指南)。

其中:下标“j”代表ICE、ISG 或TM;Tj-1为上一计算步长下的扭矩;Tj-2为最大扭矩;Tj-3为能量管理策略的请求扭矩;Δtj为计算步长;j=ICE 时,tj为发动机从0扭矩到最大扭矩的响应时间;j=ISG 或TM 时,tj为电机从最大发电扭矩到最大驱动扭矩的响应时间。
本研究中,增程式(REEV)车型和串联式(SHEV)车型使用的电池均为典型的非线性储能元件。为了简化计算模型,本研究只涉及电池的几个关键参数。SOC为电池荷电状态(state of charge)[15],R为电池内阻。图1 为模型中使用的电池内阻曲线图。

图1 电池内阻随SOC 变化曲线
2 能量管理策略的描述和改进
2.1 规则式能量管理策略
运行规则式策略(RB)时,根据SOC 和整车需求功率Pdem决定辅助动力单元(APU)启动状态和运行工作点。本文执行的规则式策略考虑了对电池电流的影响,保证电池电流不超过许用限值。APU 未启动,计算考虑电池充放电电流极值所对应的电池放电功率上限Pbat,max,Pdem一旦大于Pbat,max,APU 启动,防止电池电流过大;APU 启动时,通过Pdem和SOC 查表求得APU 允许最大功率,约束APU 实际工作点。
2.2 动态ECMS 管理策略
本文应用了一种动态等效燃油消耗最小策略(DECMS)[9]。混合动力汽车的能量管理问题可以视为一个有约束的有限时域最优控制问题,在一个行驶工况下求解辅助动力单元(APU)的电功率控制序列PA(t)使总燃油消耗量FC 最少[16]。

式中:t0为计算域的开始时间;tf为计算域的结束时间;PA(t)为APU 电功率;Pdem(t)为车辆需求功率。此问题可以用Pontryagin 极小值原理(Pontryagin’s maximum principle,PMP)解决,等效燃油消耗最小策 略(equivalent consumption minimization strategy,ECMS)作为解决此优化问题的一种启发式方法也可以用PMP 进行分析推导[17]。对于串联构型,PMP 中的Hamilton 函数为[18]

式中:S(t)为电池的SOC,PA(t)为APU 的电功率,λ为等效因子,为发动机的瞬时油耗,Pdem(t)为车辆需求功率,为电池SOC 的导数。
在实时应用过程中,如何在行驶工况未知时选取合适的等效因子λ成为ECMS 的挑战。动态等效燃油消耗最小策略(DECMS)采用SOM 神经网络方法用于速度特征识别,并根据识别结果从一个预定义集合中选择最合适的等效因子。另外,考虑到发动机的实际启停特性和SOC 约束,此策略引入模糊逻辑控制器来控制发动机最小运行时间,其详细原理可参考文献[9]。
动态等效燃油消耗最小策略(DECMS)在一辆增程式乘用车上展现了较好的燃油经济性。本研究将DECMS 应用于4.5 t 轻型卡车增程式(REEV)和串联式(SHEV)两种车型上。DECMS 的实施框架见图2。

图2 DECMS 策略执行框图
首先,采用聚类中心数为4 的SOM 神经网络方法用于速度特征识别[9]。图3 展示了训练完毕的SOM神经网络对一个中国-全球瞬态整车循环(China world transient vehicle cycle,C-WTVC)工况的识别结果,右侧纵坐标代表4 种车速特征模式,并将识别结果用于构造打靶工况。

图3 C-WTVC 工况车速特征识别结果
其次,通过打靶法求解4 种打靶工况下的最优等效因子。打靶法是用PMP 求解最优控制问题的标准方法[16]。给定4种打靶工况vp(t),t∈[t0,tf],p∈{1,2,3,4}。打靶求解的优化问题进一步表达为:

式中:S0为初始SOC,Sf为终值SOC,本文中S0=Sf=55%。打靶过程中,引入发动机最小运行时间tmin保证电量均衡,并选择油耗FC 最小的λ作为最优等效因子。1.5 L 发动机增程式(REEV)和串联式(SHEV)车型在4种打靶工况下均可以求得电量均衡的λ值,然而1.2 L发动机在打靶过程中发现SHEV 车型在超高速工况下无法找到电量均衡的λ4值,测试结果见表2。这意味着满足此约束条件的微分方程无解,导致DECMS 策略中的关键控制参数λ4缺失。

表2 1.2 L 发动机选型下的4 种打靶结果
2.3 混合管理策略的提出及其对整车油耗的影响
研究中发现动态等效燃油消耗最小策略(DECMS)应用于1.2 L 发动机SHEV 车型时,出现超高速打靶工况无解的情况,导致参数λ4的缺失,λ4暂取系统约束范围内的极限值,并进行仿真。仿真结果显示,SOC在高速区间跌破最小限值,见图4。

图4 SHEV 1.2 L 车型DECMS 的SOC 曲线
由图4 可知:SHEV 车型在1.2 L 发动机配置下,动态等效燃油消耗最小策略(DECMS)无法满足其在中国-全球瞬态整车循环(C-WTVC)高速工况的功率需求,电池电量耗尽。针对此问题,本文引入混合策略的概念,其关键思想在于,如果能在低、中速工况使用DECMS,而在预知未来一段工况超出DECMS 适用范围时提前切换至规则式策略(RB),就能满足SHEV 车型在小发动机下的动力性需求。当模式切换条件在整个行驶工况不满足时,不需要切换策略,混合DECMS(M-DECMS)就等价于DECMS。M-DECMS 在一个C-WTVC 循环的执行方式见图5。其中,红色点划线区分运行模式。

图5 混合DECMS 的执行示意图
2.3.1 混合管理策略的模式切换
混合DECMS(M-DECMS)的模式切换时刻tsw是决定此策略控制效果的关键参数,其对于电池SOC 的影响可见图6,该图截取了在一个中国-全球瞬态整车循环(C-WTVC)不同模式切换时刻下的SOC 曲线。模式切换时刻tsw分别取857、1 157 和1 257 s。

图6 不同模式切换时间下的SOC 曲线
由图6 可知:当模式切换时刻tsw取857 s 时,SOC在进入高速工况前的低中速工况提前充电,SOC 有明显的上升;当tsw取1 257 s 时,SOC 在进入高速工况后不久跌破最小限值。另外,在857、1 157 和1 257 s 3 种切换时刻下的100 km 油耗分别为14.43、14.34、14.45 L,tsw取1157 s 时油耗最低。此结果说明,如模式切换的时刻不当,会增加油耗;如果模式切换时刻太晚,还会造成电池过放的问题。模式切换时刻在实时应用中,需要车辆通过GPS 等方式获取外部道路信息,在预测到未来一段工况超出策略适用范围时根据当前SOC、未来工况平均车速等信息计算确定。需要说明的是,本文中模式切换时刻为标定值,关于最优模式切换时刻的实时算法有待后续研究。
2.3.2 混合策略的工况适应性
为了分析混合DECMS(M-DECMS)应用于串联式(SHEV)车型时在不同工况下的燃油经济性,对中国-全球瞬态整车循环(C-WTVC)低速、C-WTVC 中速、实际路谱和C-WTVC 150 km 这4 种工况进行仿真。实际路谱为采集获得的一款商用车在日常行驶路线上的车速数据,车速曲线如图7 所示,平均车速41 km·h-1,最高车速约为73 km·h-1,包含高速工况。60

图7 采集车速曲线
在4 种工况下混合DECMS(M-DECMS)和规则式策略(RB)的油耗仿真结果见表3。由表3 可知,在中国-全球瞬态整车循环(C-WTVC)和实际道路工况下,M-DECMS 的油耗分别比RB 高0.2%和0.4%;在C-WTVC 低速和中速工况下,M-DECMS 的油耗比RB 低1.0%和1.3%。结果表明,M-DECMS 和RB 在包含高速区间的工况燃油经济性接近,而在城市拥堵等低中速工况M-DECMS 可能更具优势。在轻卡常见的城市物流场景下,M-DECMS 可以展现更佳的燃油经济性。

表3 SHEV 1.2 L 不同工况及策略的油耗
图8 展示了中国-全球瞬态整车循环(C-WTVC)中速工况和C-WTVC 工况下,发动机在不同工作点(转速和扭矩)的运行时间占比,可以解释M-DECMS 策略在低中速工况燃油经济性较好的原因。发动机的运行时间占比用γ表示。
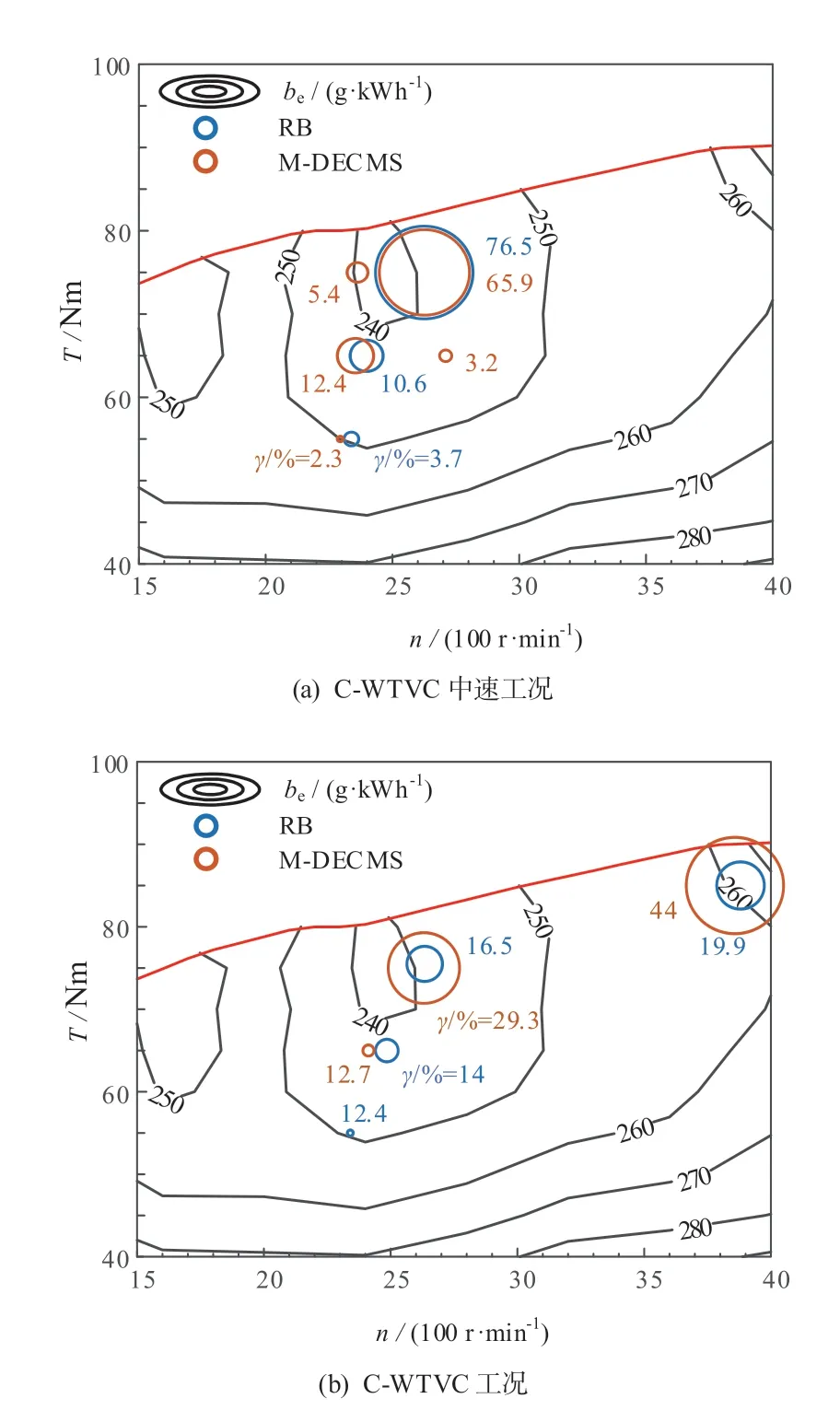
图8 SHEV 1.2 L 发动机在不同工作点的运行时间占比
可以看出在C-WTVC 中速工况,M-DECMS 相较于RB,处于发动机高效区(发动机比油耗be≤ 255 g·kWh-1)的工作点比例更高,减少了发动机能量损失;在C-WTVC 工况,2 种策略的发动机工作点分布相似,虽然M-DECMS 策略下处于高效区的发动机工作点比例略高,但是其在大负荷高油耗区的比例也增加了。
3 整车性能仿真结果及分析
为了对比增程式(REEV)和串联式(SHEV)的油耗和二氧化碳排放,仿真工况为7 个连续的中国-全球瞬态整车循环(C-WTVC),用以模拟所研究商用车的日常行驶工况。其行驶里程为150 km,总时间约为3.8 h。
3.1 动力性和燃油经济性对比
增程式(REEV)和串联式(SHEV)经仿真验证满足此款商用车型的动力性要求,动力性要求和仿真结果见表4。由表4 可知,选用同一发动机,串联式和增程式车型最高车速相同,这是因为最高车速取决于发动机外特性;最大爬坡度则由TM 电机外特性曲线决定,因此两种车型下其值也相同;串联式车型50 km·h-1加速时间小于增程式车型,这是因为串联式车型的动力性电池可以在短时间内发出较高的峰值功率。在同一车型下,选择较大的发动机可以提高最高车速和50 km·h-1加速时间。

表4 动力性要求及仿真结果
油耗仿真中,将增程式的初始SOC 设置为100%,用以模拟增程式在日常使用中初始满电的情况。为便于比较,在计算增程式最终油耗时,将电池终了SOC 折算至25%;同时,仿真中确保串联式的初始SOC 与终了SOC 差异小于1%便于比较燃油经济性。不同能量管理策略下的100 km 油耗见图9。

图9 不同能量管理策略下的100 km 油耗
在中国-全球瞬态整车循环(C-WTVC)150 km 工况,对于1.2 L 发动机,增程式车型在动态等效燃油消耗最小策略(DECMS)下油耗优于RB 策略,相较于RB 降低了6.4%;串联式车型规则式策略(RB)油耗略优于混合DECMS(M-DECMS),差异为0.2%;在油耗最低策略下,增程式较串联式降低了30.0%的燃油消耗。对于1.5 L 发动机,DECMS 在串联式和增程式车型下燃油消耗均优于RB 策略,分别降低1.4%和5.2%;在油耗最低策略下,增程式较串联式降低了30.2%的燃油消耗。综上所述,在增程式充分利用电池电能的情况下,增程式相较于串联式车型可以平均降低30.1%的燃油消耗。
动力部件能耗分解图从能量损失(QL)的角度展现了不同策略间油耗差异的来源,见图10。

图10 主要动力部件能耗分解图
以选用1.2 L 发动机的2 种车型为例(见图10a),同一车型下不同策略主要影响了发动机损耗和电池损耗,ISG 电机和TM 电机损耗差异很小。REEV 1.2 L车型中,动态等效燃油消耗最小策略(DECMS)的发动机损耗和电池损耗低于规则式策略(RB)。SHEV 1.2 L车型中,RB 与混合DECMS(M-DECMS)的总损耗十分接近,因而其燃油消耗也接近。另外,由于1.5 L 发动机总体燃油消耗率优于1.2 L 发动机,因而在同一策略同一车型下,其发动机损耗明显小于REEV,且电池损耗也有所降低。
3.2 二氧化碳排放对比
本研究中二氧化碳排放是指车辆在驾驶阶段产生的燃油消耗直接碳排放和外部电能消耗间接碳排放,其中串联式(SHEV)车型外部电能消耗为零。
本文采用碳平衡质量法计算100 km 油耗直接二氧化碳排放质量[19]

式中:kf为汽油碳排放系数,kg·L-1;Qfue为车辆在特定行驶工况下的100 km 燃油消耗,L;ρ为汽油密度,取值0.745 kg·L-1;wF为汽油碳质量百分比,取85.7%;B为碳到二氧化碳转换系数,B=3.67。
本文估算100 km电能消耗间接二氧化碳排放质量[19]

式中:Qele为车辆在特定行驶工况下的100 km 电能耗,kWh;η为考虑电力传输及充电过程损耗的传输效率,取值88%[19];P为火力发电在我国电力生产中的占比,取值67.8%[20];kc为全国电力平均kWh CO2排放质量,取值0.583 9 kg[21]。
基于上述公式和仿真结果,在中国-全球瞬态整车循环(C-WTVC)工况下按照日均行驶里程150 km、年工作日按250 d 计算,二氧化碳年排放质量mae见图11。
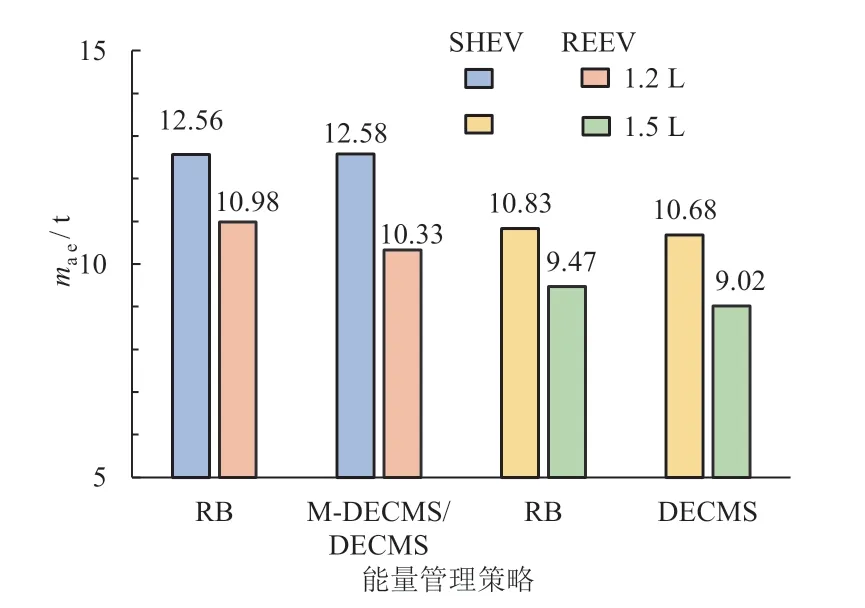
图11 不同能量管理策略下的二氧化碳年排放质量
由图11可知:1.2 L 排量发动机串联式车型(SHEV 1.2 L)在规则式策略(RB)下年排放量略小于混合DECMS(M-DECMS),降低了20 kg;1.2 L 排量发动机增程式车型(REEV 1.2 L)在动态等效燃油消耗最小策略(DECMS)下年排放量相比RB 降低了650 kg;在两种车型各自油耗最优的策略下,增程式车型年排放量相比串联式车型低17.75%,减少了2.23 t。1.5 L 发动机下,增程式和串联式最优策略均为DECMS,年排放量较RB 分别减少了450 kg 和150 kg。在油耗最佳策略下,增程式相比串联式降低15.54%,减少了1.66 t 二氧化碳排放。
3.3 不同混合动力系统的电池充放电特性比较
增程式(REEV)和串联式(SHEV)的电池充放电特性存在差异,电池充放电电流的大小常用充放电倍率(battery C rates)表式,充放电倍率对电池的循环寿命有着较大的影响[22]。本文根据仿真获得的电流值对两种动力系统方案在中国-全球瞬态整车循环(C-WTVC)150 km 工况下的电池充放电倍率进行对比。两种系统的动力电池参数见表1,比较结果见图12。该图为1.2 L 排量发动机下增程式车型(REEV1.2 L)和串联式车型(SHEV1.2 L)在不同策略下的电池充放电倍率频率直方图。横轴表示电池充放电倍率,增程式组距为0.2 C,充放电倍率从0 至2.8 划分为14 个区间;串联式组距为2 C,充放电倍率从0 至28 也划分为14 个区间。纵轴为对应组距下的频率,所有条形图的高度之和为1。规则式策略(RB)下的充放电倍率分布见图13(a)和(b),动态等效燃油消耗最小策略(DECMS)以及混合DECMS(M-DECMS)见 (c)和(d)。1.5 L 发动机下的分布规律与1.2 L 类似,此处不再展示。
由图12 可知:增程式(REEV)的电池充放电倍率小于2C,串联式(SHEV)的电池充放电倍率最高可达15C至20C。两种策略下增程式对电池充放电倍率的使用需求都明显低于串联式,也就是说从电池使用寿命的角度来说,增程式优于串联式,串联式的动力电池配置应关注电池的充放电性能和循环寿命。另外,在选择两种动力系统方案时,应考虑它们不同的充放电特性对电池循环寿命的影响,从电池生命周期的角度对成本、碳排放等进行更深入的研究。

图12 1.2 L 发动机不同车型电池电流控制表现
4 结论
针对一款日均行驶里程150 km 的4.5 t 轻型商用车,本文仿真分析比较了增程式和串联式两种动力系统的动力性、燃油经济性和二氧化碳排放。比较了实用性强的规则式策略(RB)和动态等效燃油消耗最小策略(DECMS),确定了不同混合动力构型下的油耗最低策略。针对等效燃油消耗最小策略应用于串联式车型时电池电量在高速工况会提前耗尽的问题,提出了改进的混合DECMS 策略(M-DECMS)。结果表明:在中国-全球瞬态整车循环(C-WTVC)工况、150 km 行驶里程下,1.2 L 发动机配置的增程式电动汽车(REEV)的最佳策略为DECMS,串联式电动汽车(SHEV)为规则式策略;1.5 L 发动机配置下,增程式和串联式最佳策略均为DECMS。在C-WTVC 工况最佳策略下,增程式车型相较于串联式平均下降30.1%的燃油消耗及16.65%的二氧化碳排放。因此,增程式车型在燃油消耗和驾驶阶段二氧化碳排放上要优于串联式。
