地面三维激光扫描精度的影响因素研究
2022-10-11倪海滨黄雪亭董彦君修明军陈廷华
丁 鸽 倪海滨 黄雪亭 董彦君 卞 磊 梁 坤 修明军 陈廷华
(济南市勘察测绘研究院, 山东 济南 250101)
0 引言
三维激光扫描仪是一种用点云形式表示复杂物体信息的测量仪器。2008年,谢瑞,胡敏捷等针对不同温度、湿度、光照环境下的点云数据采集影响[1],2009年,施贵刚等推导了对不同距离平面和球面标靶靶心坐标拟合精度、配准方差分析指出最佳扫描距离为10 m,标靶的配准精度最好、误差最小[2],Arianna Pesci等针对不同距离不同分辨率的扫描环境对扫描物体可视性检验得出具体情况的扫描最佳设置[3],2014年,Javier Roca-Pardinas等通过对不同距离不同角度的木板重复扫描实验推导出测量误差与两个最重要的影响因素(距离和角度)的关系模型[4]。2011年,张启福、孙现申等评定出Riegl VZ-400三维激光扫描仪的实际测距精度为0.6146 mm,符合厂商标称精度(2 mm@100 m)[5],2014年,李强、邓辉等对重庆某采煤区两期监测点云数据处理,通过提取分析连续时段连续区域的变形量,完成了测区扫描整体变形分析[6-8]。2021年郭献涛对与地面三维激光扫描相适应的变形监测新模式与变形提取新方法进行了研究,解决了地面三维激光扫描在应用中的若干问题[9]。
1 地面三维激光扫描系统原理
1.1 系统原理
在全景扫描中,三维激光扫描仪通过转动轴系获取区域信息水平角,通过扫描仪上部机械转动获取,原理与全站仪测量技术相同,基本的观测量是距离r,水平方向φ,和垂直方向θ,不同的是扫描仪采集的是高密度点云。每个点以极坐标(r,φ,θ)或笛卡尔坐标(x,y,z)方式表示,并且能够获取反射强度信息。极坐标系与笛卡尔坐标之间的转换为式(1)。
(1)
1.2 影响地面三维扫描仪精度因素
(1)仪器内部构件。主要包括硬件、标尺和设备。仪器的最大扫描距离和扫描间隔如何影响点云采集的质量。
(2)扫描环境条件。该影响因素包括扫描过程中的温度、湿度、压力等。在扫描过程中的不可避免的扫描到无关信息,像噪声点、“飞点”等。
(3)反射物体属性。该因素主要包括物体的各项异性,反射面反射率、粗糙程度、材质以及与扫描仪器的波长匹配程度等。
(4)扫描几何分布。扫描仪的架设位置,架设不同位置影响距扫描物体的距离、角度[10]将会影响扫描点云的精度。
2 LS-PCA组合分析方法
最小二乘方法,通过最小化误差的平方和获得变量之间的最佳函数匹配关系,该方法以多种方式应用于平面拟合,最小二乘方法在用于数据拟合时将所有数据用于运算,使得结果受到某些“不利”数据的影响[11]。Hoppe提出利用主成分分析(principal component analysis,PCA)评估每个采样点“临域”内平面拟合和法向量的计算,PCA[12]可以理解为最小二乘的几何优化或等效于最大似然估计,并在精度和效率上优于最小二乘方法,因此,该方法在平面拟合上得到广泛的应用,结合两种算法解决了“不利”因素的影响并在精度上得到提高。
2.1 最小二乘方法
利用最小二乘方法[13]求得未知参数。对于三维数据点{Pi(xi,yi,zi);i=1,…,n},平面可定义为
(2)
式中,a、b、c是平面参数;d为各点到平面的距离,可表示为z=f(x,y),z方向的方差累积最小化公式为
(3)

(4)
获取平面参数最通用的方法为特征值求解,即在a2+b2+c2+d2=1限制下使∑ij=(axij+byij+czij+d)2最小化,等同于计算式(7)中矩阵M的最小特征值对应的特征向量
(5)
2.2 主成分分析方法
PCA从神经科学到计算机图形分析,在不同领域得到广泛应用,该方法利用无参数方法把复杂数据中的重要信息提取出来。对3D点云数据{Pi(xi,yi,zi);i=1,…,n},n个点的协方差矩阵为式(6)。
(6)
设平面方程为
其中,cosα、cosβ、cosγ为平面上点(x,y,z)处的法向量方向余弦;|p|为原点到平面的距离。式(7)转化为式(8),求平面方程转化为求a、b、c、d四个参数。任一数据点(xi,yi,zi)到该平面的距离为
(9)
(10)
将f分别对四个未知参数a、b、c、d求偏导,将参数d带入式(10)得式(11)。
由式(12)可得求解位置的参数(a,b,c)T为系数矩阵的一个特征向量,对应特征值λ,该系数矩阵即为协方差矩阵的等价公式。由式(8)和特征方程Ax=λx得出式(13)。
(13)
2.3 LS-PCA组合法
针对PCA方法对边界噪声点云影响较为敏感,而最小二乘方法考虑全部点云数据,因此,结合两种方法拟合平面,具体方法步骤为:
(1)利用最小二乘方法拟合平面获得平面公式ax+by+cz+d=0,求得平面点云各点到拟合平面的距离d。
(2)计算拟合平面点云由(1)求得的距离d的中误差σ,当各点距离di>2σ,删除该点;否则保留。
(3)对去除噪声的点云数据利用主成分分析方法拟合,以获得拟合平面的参数。
(14)
3 不同因素对扫描质量的影响和分析
3.1 入射角和扫描距离影响分析
为了探讨扫描距离和入射角对扫描质量影响[14],对0.5 m×0.3 m的木板扫描。分析扫描点云的质量与扫描物体的距离和入射角关系[15]。扫描距离及入射角如下:
扫描距离:5 m,10 m,20 m,30 m,40 m,50 m,60 m。
扫描入射角:10°,20°,30°,40°,50°,60°,70°,80°。
对上面的7×8=56个组合平面分别利用2.3节提出的方法拟合,结果见图1。
从图1(a)看出,扫描距离相同情况下,扫描角度增加,误差超过“异常值”的点数比例增多,平均拟合中位数也相应增大。入射角接近60°时,拟合中位数为“上四分位数”,则数据处于拟合距离集的上限占较大比例;入射角超过70°以上,中位数超过“异常值”上限;从图1(b)得出,入射角为0°时,距离越大,拟合距离中位数愈大,误差“异常值”愈多,70 m处距离大于1 cm的点云数据占比56%,而在入射角为80°时大于1 cm的点云数据占比70%,这种情况说明扫描距离小于70 m的情况下,入射角是影响点云扫描质量的最大因素。
平面似合误差与入射角和扫描距离的关系见图2。
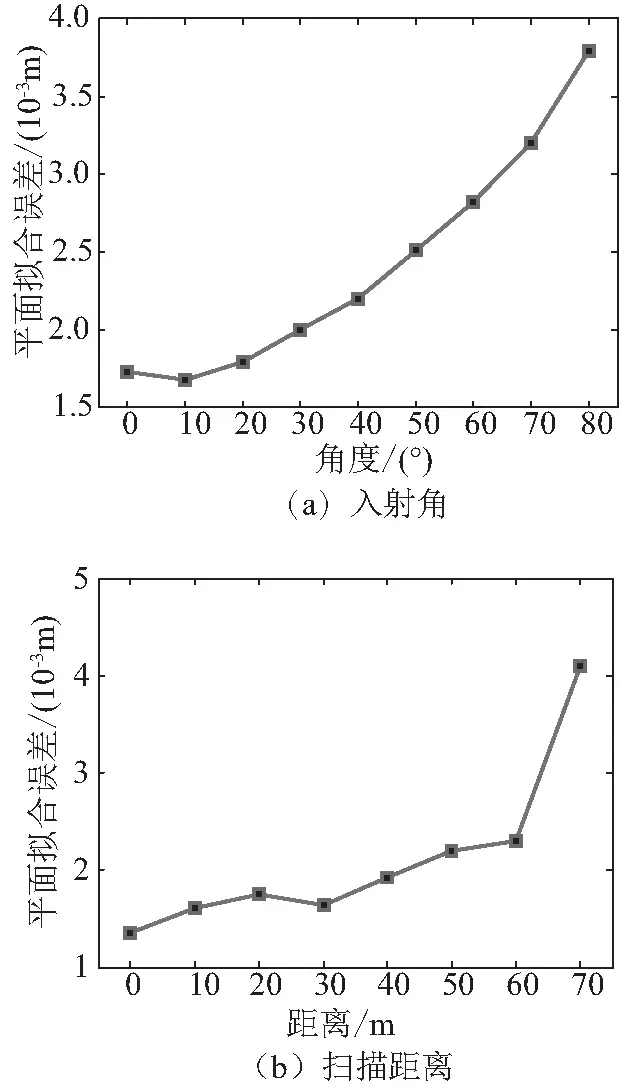
图2 平面拟合误差与入射角和扫描距离的关系
从图2可以看出,拟合误差随角度、扫描距离增大均增大,角度对扫描质量的影响趋势更加显著;右图得出扫描距离小于70 m时,平面拟合误差随扫描距离增大而增大的趋势较为缓和,说明了入射角度对扫描点云质量影响最大。
3.2 光照强度影响分析
因后续隧道的点云扫描均在封闭环境下,光照强度较小,设计实验讨论光照强度对扫描点云质量的影响,步骤如下:
(1)白天光照强度高的环境下:架设Riegl VZ-400扫描仪,木板距扫描仪20 m处固定在三脚架上,扫描中心与木板高度一致,扫描木板。
(2)将木板分别支架在30 m、40 m处,重复上述步骤(1)。
(3)利用2.3节中的点云拟合算法分别计算中误差。
(4)标记上述扫描仪和三脚架的对应位置,夜晚环境下,重复步骤(1)~(3),计算结果显示见图3。
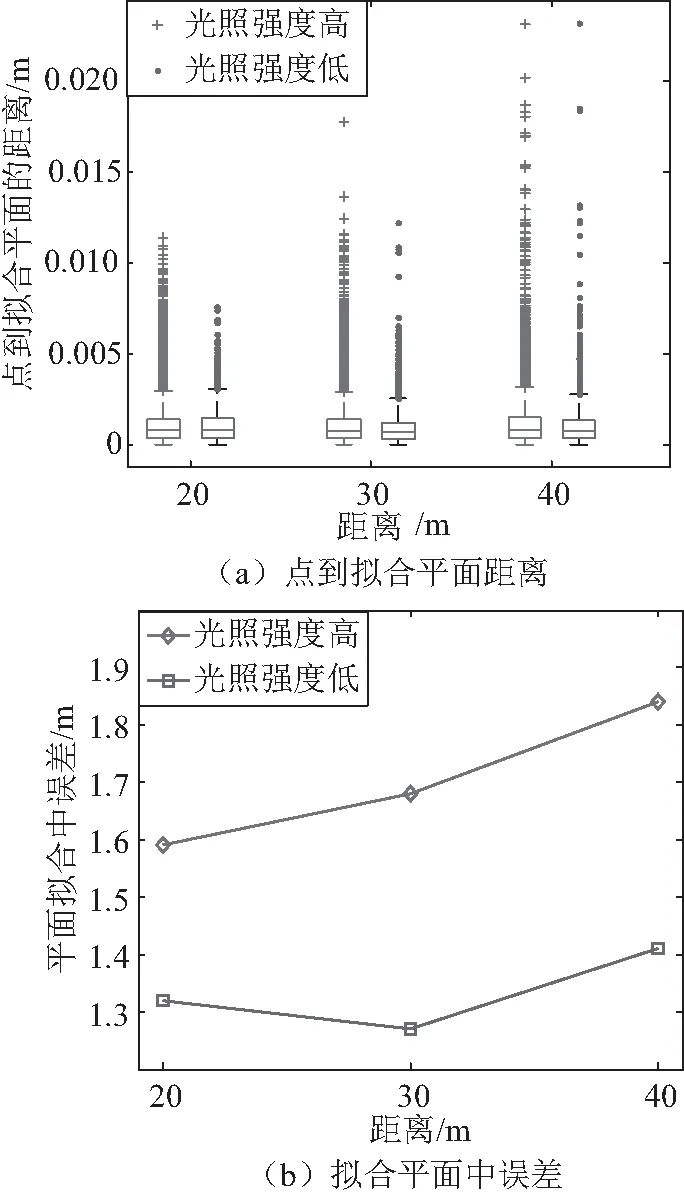
图3 光照强度误差分析
从图3(a)可以看出,光照强度高或低时,随着扫描距离的增大,点到拟合平面的异常值占比均增大,但是光照强度低的扫描环境“异常值”数据占比少于高光照强度情况,图3(b)显示随着距离的增加,光照强度高或低时拟合平面中误差均增加,因此,封闭环境下的扫描点云质量较好,有利于提高扫描点云可利用率的比重。
4 结束语
本文通过介绍地面三维激光扫描仪的系统分类及扫描原理[16]分析了扫描仪的基础信息,通过设计实验模拟了影响点云扫描质量的两个最重要的因素——测量距离和入射角度:分析结果显示,测量距离和入射角度越大,扫描质量影响越大,建议单站扫描时,最大入射角小于60°;分析了光照强度对点云扫描质量的影响,得出光照强度低对点云扫描质量更有利。
