贴近摄影影像与倾斜影像融合精细化建模方法
2022-10-11买小争冯学胜颜振能刘一军
买小争 冯学胜 颜振能 刘一军
(自然资源部第七地形测量队, 海南 海口 570203)
0 引言
近年来,随着无人机技术和倾斜摄影测量技术的不断发展,利用无人机倾斜摄影技术快速生产实景三维模型,成为获取城市级三维地理信息的主要技术手段。但是受飞行高度、拍摄角度、遮挡等因素的影响导致模型几何和纹理信息缺失,模型存在拉花、漏洞等问题,严重影响模型的完整度和精细度,后期需要投入大量的技术人员进行模型修饰工作。因此,建立精细化实景三维模型具有重要意义和广阔的前景。
贴近摄影测量是由张祖勋院士团队针对精细化测量要求提出的全新摄影测量技术[1-3],是精细化对地观测需求与旋翼无人机发展结合的必然产物。贴近摄影测量是面向对象的摄影测量,它以物体的“面”为摄影对象,利用旋翼无人机贴近摄影获取超高分辨率影像,进行精细化地地理信息提取,可高度还原地表和物体的精细结构,弥补了其他摄影测量无法达到的精细度要求。贴近摄影测量为城市建筑精细三维重建、古建筑修复、地质、滑坡监测等方面提供一种有效的补充手段。
文章基于倾斜摄影测量和贴近摄影测量两种技术的优点,选用多旋翼无人机分别采集建筑的倾斜影像和贴近影像数据,将贴近摄影影像与倾斜影像数据进行融合建模,模型精细度明显提升,能够极大程度地改善目前单一倾斜摄影建模存在的系列问题[4-6],并从模型精度、纹理结构上对融合建模模型进行质量评价。
1 摄影测量基本原理
1.1 倾斜摄影测量原理
倾斜摄影技术是国际测绘遥感领域近年发展起来的一项高新技术,通过同一飞行平台上搭载一台或多台传感器,多次获一次性从垂直、倾斜等不同角度采集影像,获取地面物体更为完整的侧面纹理信息,采集的垂直和倾斜影像经建模软件可以完成大面积实景三维模型构建。
1.2 贴近摄影测量原理
贴近摄影测量是以物体“面”为对象,利用无人机或其他拍摄设备贴近物体表面摄影,获取(亚厘米级)高分辨率影像,并进行摄影测量处理,从而恢复被摄对象的精确坐标和精细形状结构。相对于倾斜摄影测量,贴近摄影重点在于在适当的角度下近距离拍摄建筑侧面,获取的建筑立面信息更完整,纹理细节更丰富,实现其他摄影测量无法达到的精度要求。贴近摄影原理如图1所示。
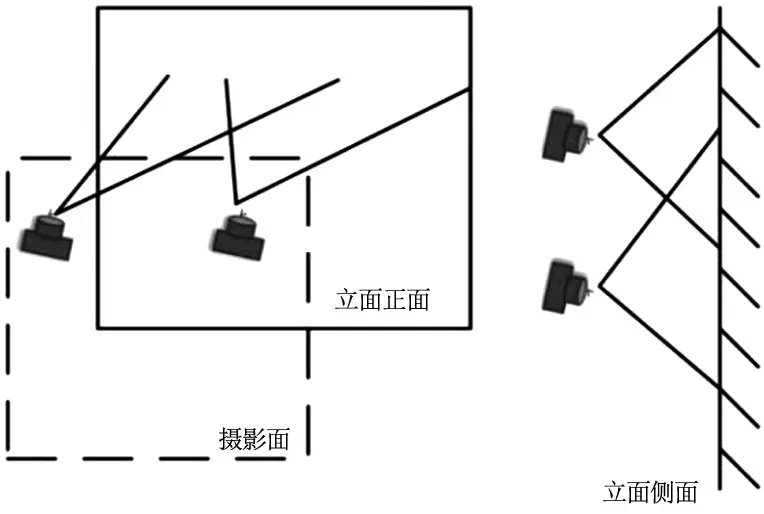
图1 贴近摄影测量
2 融合精细化建模技术思路
贴近摄影影像与倾斜影像融合精细化建模的技术思路是:由无人机获取大场景倾斜影像并在建模软件中构建粗模,贴近摄影采集目标物侧面高分辨率影像并进行空三加密处理,生成密集点云数据,将贴近摄影影像空三加密成果与大场景空三成果进行融合,两者匹配点云数据互相补充使模型精细度得到提升。由于贴近摄影影像生成的点云不包含地面信息,需要在粗建模型中提取特征点作为控制点提供精确坐标辅助贴近摄影影像进行空三加密,保证贴近摄影与倾斜影像模型坐标系的统一,实现两者数据的融合[7-8]。
倾斜影像与贴近影像融合精细化建模的主要技术流程是:①常规倾斜摄影与粗模构建。无人机常规飞行采集低分辨率倾斜影像数据,经建模软件空三加密、多视角影像密集匹配、3DTIN模型构建与优化、纹理关联贴附后生成实景三维模型成果[9];②贴近影像采集。贴近摄影采集数据有根据设计三维航线飞行和手动遥控飞行两种方式。前者是基于第三方航线规划软件,在粗模三维立体环境下进行贴近飞行曝光点设计航线。后者则完全依靠技术人员现场手动操控无人机飞行采集影像。前者相对于后者,能够保证贴近摄影影像均匀的重叠度,自动化飞行程度高,避免漏拍,但设计时要特别注意近地障碍物对无人机飞行的影响和近地飞行安全;③贴近摄影空中三角测量。贴近摄影影像导入建模软件进行密集匹配,从倾斜影像生成的粗模中选取明显特征点作为贴近摄影空三加密控制点,从而统一两者的坐标系;④空三成果融合。合并两者的空三加密成果,实现加密点云的融合拼接;⑤融合精细化建模。基于合并后的空三加密成果,使用建模软件进行精细化模型构建。整体技术流程如图2所示。
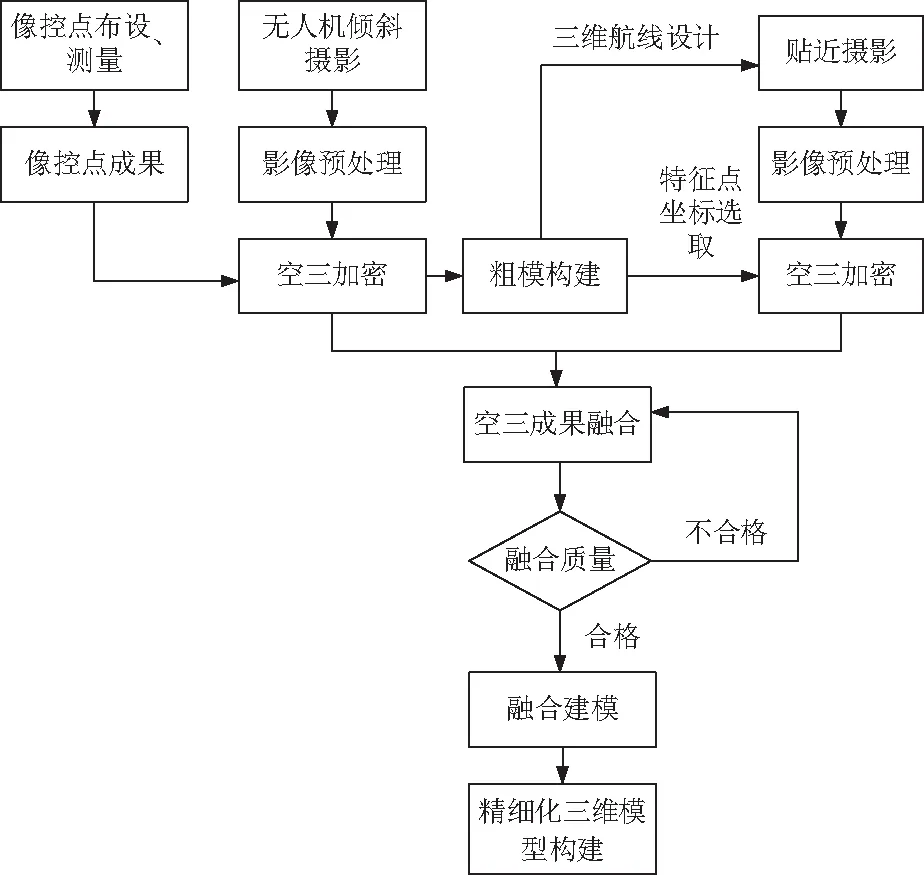
图2 融合建模技术路线
3 融合建模试验
3.1 数据获取
本次试验使用大疆M300多旋翼无人机搭载P1相机采集原始影像数据。常规倾斜影像获取方案是:飞行高度120 m,航向重叠度80%,旁向重叠度70%,云台角度为-45°;贴近摄影影像采集方案是:飞行高度2~64 m,距离建筑立面8 m左右,航向重叠度80%,旁向重叠度50%,镜头垂直于建筑立面,近地面镜头倾斜拍摄[10-11]。数据采集过程中,倾斜摄影、贴近摄影和像控点测量工作同时进行,采集到的原始影像具有相似的光照效果,使融合建模效果达到最佳。两种方案的航摄设计和曝光点设计见表1和图3。
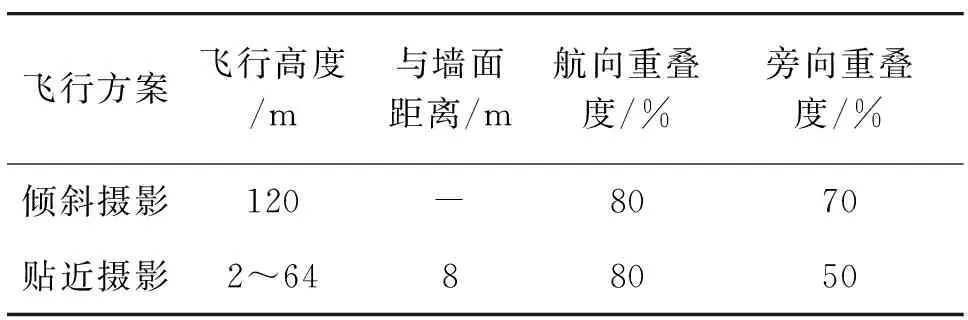
表1 两种方案的航摄设计
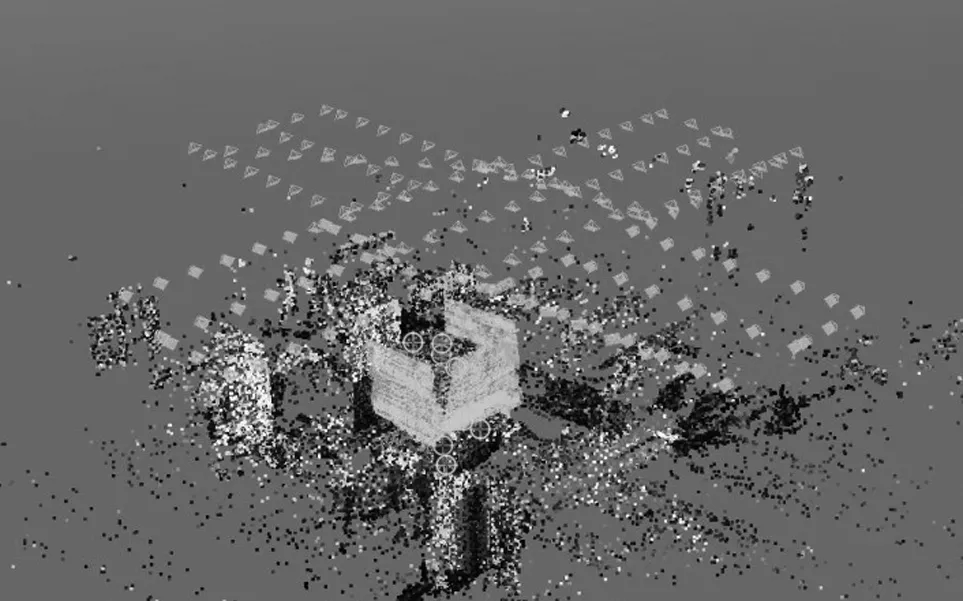
图3 两种方案的曝光点设计
3.2 空三加密
将无人机倾斜影像、贴近影像、控制点成果导入重建大师建模软件中各自进行空三加密。无人机倾斜影像使用地面控制点进行平差,并生成粗模;贴近影像进行密集匹配,从倾斜影像生成的粗模中选取明显特征点作为控制点辅助贴近摄影进行空三加密,以保证两者数据具有统一的空间参考基准。提取特征点时选择建筑立面尽量不少于3个面,位置选取尽量准确。特征点坐标提取见图4。
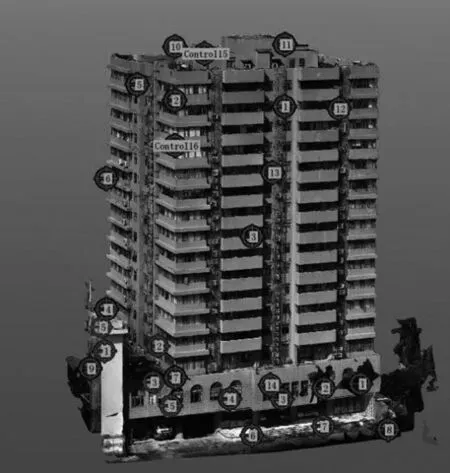
图4 特征点坐标提取
3.3 空三成果融合
倾斜影像和贴近影像融合精细化建模的关键步骤是两者空三成果的融合,即空三加密点的融合拼接,空三加密点融合的质量直接影响到模型的精细程度。单一倾斜影像匹配点相对较稀疏,贴近影像匹配点较密集。在重建大师软件中将两者空三加密成果进行合并,点融合前后的具体情况见图5和图6。
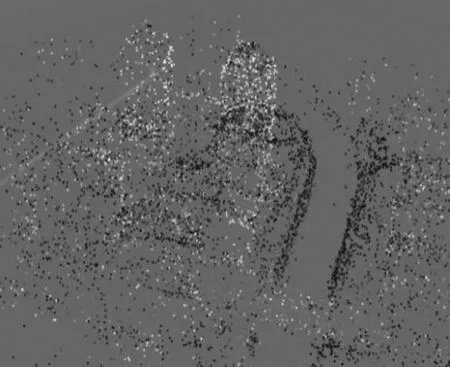
图5 倾斜影像匹配点
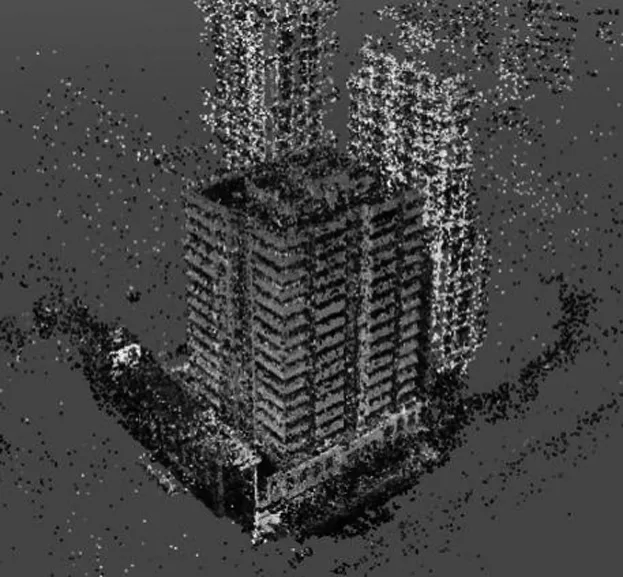
图6 融合后密集点
3.4 精细模型重建
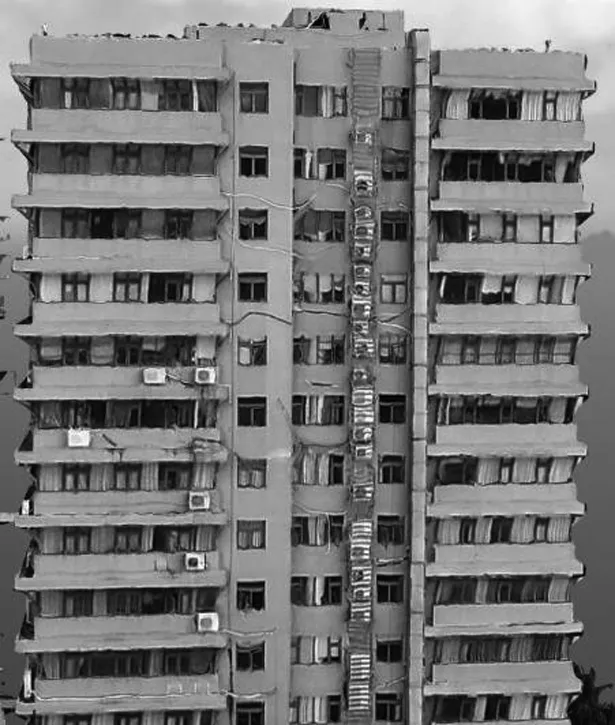
根据已经融合好的空三加密成果,利用重建大师软件构建TIN结构,对三角网进行优化[12-15];在倾斜影像和贴近影像中选择最佳的目标影像进行纹理映射与优化,构建精细三维模型时划分小区域瓦片,通过多节点集群系统并行处理,完成三维模型重建。需要注意的是,融合后点云密度和影像像素大幅度增加,建模时对集群服务器的运算能力和显卡都有很高要求,应适当减小分块避免建模失败情况发生。融合前后三维模型对比情况如图7所示。
(a)融合前
4 融合建模质量评价
三维模型质量主要包含位置精度、几何完整性、逻辑一致性等。本文从模型精度、纹理结构和精细度上对融合后模型进行质量评价。
4.1 模型位置精度
为检验融合建模模型的位置精度,采用RTK和全站仪实地测量11个检查点作为检核数据,在DasViewer浏览软件中,以实地测量的三维坐标值与模型上采集的同名点坐标值进行对比。通过精度对比分析,融合后三维模型的平面位置中误差m=0.030 1,高程中误差mz=0.016 6,满足CH/T9015—2012《三维地理信息模型数据产品规范》中Ⅰ级1∶500成图比例尺三维模型产品规定的平面中误差小于0.3 m、高程中误差小于0.5 m的要求。模型精度统计结果见表2。
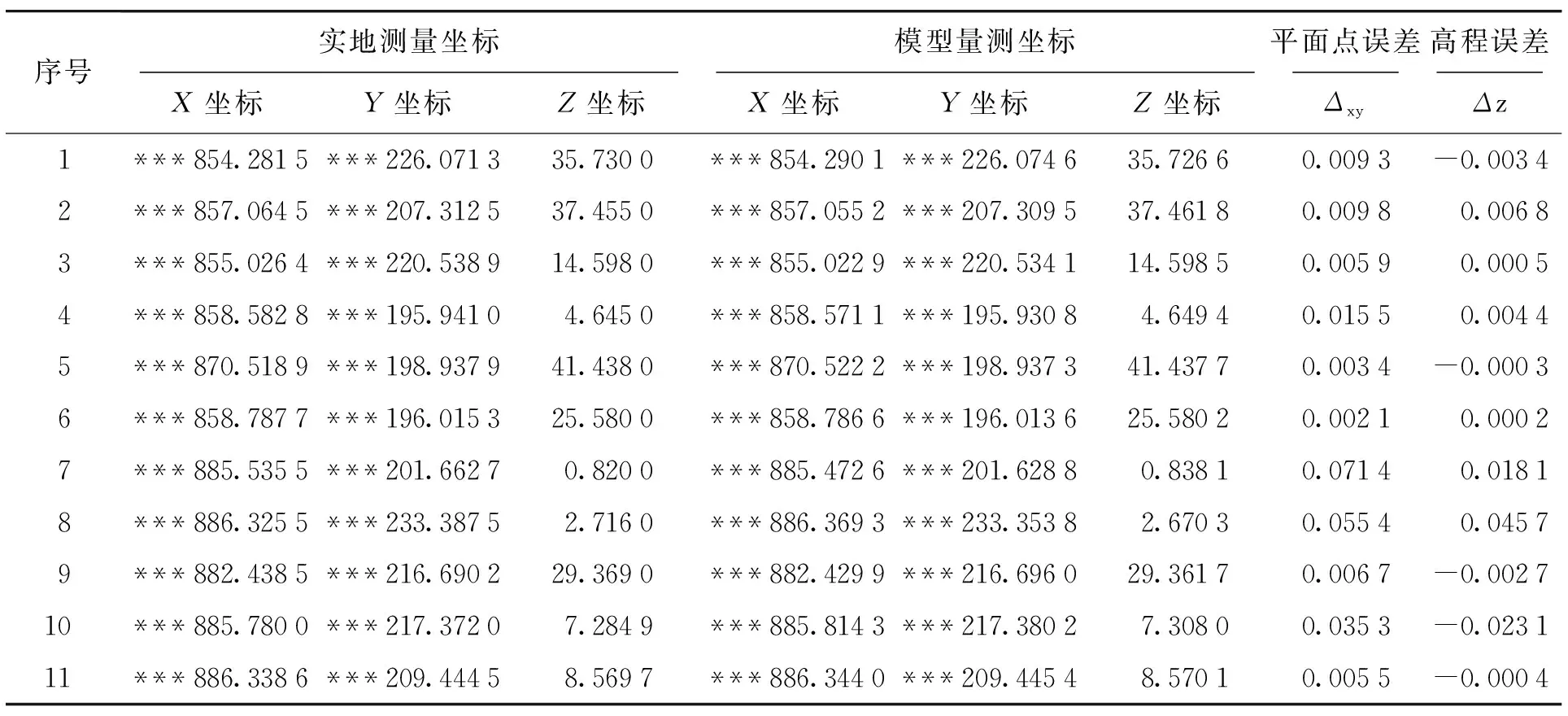
表2 模型精度统计 单位:m
4.2 模型纹理结构及精细度
通过融合后模型与倾斜影像建立的三维模型这两套模型的纹理结构和精细度对比,可以直观地看出:①融合建模模型地物几何结构更完整,尤其是建筑檐下结构表现真实,极大程度地改善拉花、粘连、破洞现象;②融合后模型的纹理细节更细腻,清晰度有明显提升;③融合后建筑模型后期修模工作大大减少。如图8所示。
5 结束语
针对常规无人机倾斜摄影测量技术建模,采用贴近摄影影像和倾斜影像融合的建模方法,极大程度改善了常规倾斜影像存在的模型粘连、破洞、拉花等现象,融合后建筑模型尺寸、几何结构更加完整,模型纹理更加细腻,精细度有明显提升,大大减少后期修模工作,建模效率得到整体提高。贴近摄影测量技术作为摄影测量发展的一个新的研究方向,贴近摄影影像和倾斜影像融合的建模方法在一定程度上解决了局部三维模型优化问题,但在面对狭窄街道的老旧街区、高层建筑底部植被遮挡严重等复杂空间环境和大面积精细化建模任务时,还存在一些困难和实际问题。因此,后续将会对复杂空间贴近摄影航线规划、多技术组合应用进行大面积精细化建模等问题进一步深入研究。
