可控励磁直线同步电动机的自适应神经模糊控制的研究*
2022-10-11王瑛杰蓝益鹏
王瑛杰 蓝益鹏
(沈阳工业大学电气工程学院,辽宁沈阳 110870)
高速高精数控机床是目前最先进的加工设备,作为衡量国家制造业水平以及国家经济水平的重要指标之一,其驱动装置也在不断更新。可控励磁直线同步电动机进给系统因其特有的结构受到广泛应用,与传统数控机床进给平台相比,除去了滚珠丝杠、齿轮和传送带等中间环节,代替了旋转电机加中间传动装置的驱动方式。
CELSM在水平方向上产生电磁推力实现直接驱动,在竖直方向上产生磁悬浮力消除摩擦力的影响从而实现无摩擦进给,从根本上解决传统驱动装置进给运动滞后及误差大的缺点,提升了整个系统的运行效率、控制精度、响应速度和使用寿命[1]。
由于CELSM进给系统本身存在端部效应、齿槽效应、推力波动和非线性摩擦力,且悬浮系统和水平系统共用一个气隙磁场,使其具有非线性、强耦合的特点,其数学模型难以精确化;同时,系统在突加负载扰动,端部效应等不确定性扰动时直接影响系统的控制精度。因此,合适的控制方法对提高系统性能具有重要意义[2]。
速度跟踪控制理论中,比例积分微分(proportion,integral,PID)控制响应时间长、精度低、抗干扰能力差、且依赖控制系统的固定参数和结构[3]。文献[4]采用自适应模糊控制与非线性反馈控制相结合的方式降低系统不确定带来的影响。模糊控制利用语言信息的特点模仿人脑的思维,不依赖被控对象的精确数学模型,具有很强的容错性和鲁棒性,但没有标准的方法将人类的知识或经验转化为模糊推理系统的规则库和数据库,同时需要有效的方法来调整隶属度函数。文献[5]采用自适应神经网络控制,利用神经网络对不确定函数进行逼近,应用于一类非线性时变状态约束系统的跟踪控制问题。神经网络控制具有良好的数值学习能力及数据处理能力,但由于无法做出决策而受到限制。文献[6]提出了多重自适应神经模糊推理系统应用于风能转换系统额定风速运行控制。文献[7]提出了基于级联模糊神经网络的四旋翼无人机位置控制,对于距离受限的姿态回路,利用飞行数据离线训练FNN控制器参数,而对于位置回路,采用基于FNN补偿比例积分微分(PID)的方法对系统进行在线自适应整定。
将神经网络与模糊控制结合,用来学习模糊系统的隶属度,构造IF-THEN规则[8],设计了基于Takagi-Sugeno模 型 的ANFIS控 制 器。ANFIS结 合了这两个人工智能控制器的优点,是具有混合学习策略的MISO(多输入单输出)模糊推理系统,以理想速度与实际速度的偏差及其积分作为输入,输出为后件参数的线性组合。利用混合训练算法训练,在前向传递阶段,节点输出被前向馈送到第四层,第四层中的结论参数使用最小二乘算法进行调整,旨在最小化系统输出的平方误差之和。在向后传递阶段,调整第一层的成员集,误差信号从输出向后传播,并使用梯度下降算法优化隶属度参数。采用该控制策略,用于CELSM的速度环控制,与其他方法相比,取得了良好的效果。
1 CELSM的工作原理及数学模型
1.1 CELSM工作原理
磁悬浮进给平台如图1所示。CELSM由动子和定子构成,电动机的定子固定在平台基座下方,动子与运动平台固定相连,实现无摩擦运行[9]。

图1 CELSM磁悬浮进给平台结构图
直线电机可看作旋转电机的展开式,因此与旋转电机的原理相同。将直流电流接入励磁绕组中形成励磁磁场,可通过调节直流电流的大小来改变磁场的大小,励磁磁极与动子铁心之间相互吸引,产生竖直向上的悬浮力,当悬浮力与平台自身重力相等时平台稳定悬浮。将三相交流电流接入电枢绕组,电流的变化形成行波磁场,行波磁场与励磁磁场之间的相互作用形成水平方向的电磁推力。电磁推力推动动子在水平方向直线运动。
1.2 CELSM数学模型
为了方便分析与计算做如下假设[10]:
(1)磁路是线性的,无饱和、无涡流和磁滞损耗。
(2)不计端部、齿槽效应,认为气隙恒定。
(3)忽略谐波的影响。
(4)磁极不含阻尼绕组。
(5)通入电枢绕组的电流为三相对称正弦交流电。
据以上假定情况,推导CELSM在交直轴坐标下的电压方程,磁链方程。
电压方程

磁链方程

式中:ud、uq为直轴和交轴的电压分量,uf为励磁回路电压;id、iq分别为直轴、交轴的电流分量,if为励磁回路电流;ψd、ψq为 直轴、交轴的磁链,ψf为励磁磁极磁链;Lmd、Lmq为直轴、交轴的主电感,Lσf为电枢绕组的漏感;Rs为电枢绕组的电阻,Rf为磁极励磁绕组的电阻。
电磁推力方程[11]
式中:Ke为电磁推力常数
水平方向的运动方程为

式中:M为CELSM动子和平台工件总质量;v为电机运行的速度;F1为 负载阻力扰动;Fd为端部、齿槽效应等不确定性外部扰动。
2 自适应神经模糊控制器的设计
2.1 ANFIS的网络结构
基于自适应网络的ANFIS控制器,具有与神经网络相似的训练方案,是一个结构简单并具有自适应学习能力的神经模糊系统。输入大量的数据后通过神经网络自学习的能力,自动生成隶属度函数和模糊规则,经过网络的学习和检验自动调整参数,提高控制精度。本文设计的ANFIS控制器以实际速度和给定运行速度的差e以及其积分ec为输入,以q轴电流iq为输出,结构如图2所示。

图2 ANFIS结构图
ANFIS由5层前馈神经网络组成[12-13]:
第1层:完成接收e和ec的过程,将输入传递到下一层。
第2层:ANFIS的第二阶段以与模糊逻辑系统大致相同的方式将清晰地输入值转换为模糊数集。本文采用高斯型隶属度函数,即µA(x)=exp其 中ci、σi代 表 曲 线的 中 心 和 宽度,也是前件参数,隶属度函数在等式(5)中给出,其中µA和 µB代表每个成员的隶属度,其值介于0到1之间。

第3、4层:一旦对输入进行了模糊化,接下来的两层就会计算规则的激励强度。分两个阶段完成,首先µA和 µB的 值相乘,如式(6)所示,其输出代表每一条规则的适应强度,然后执行乘积的归一化,如式(7)所示。

总之,前4层主要用来计算每条规则的后件即

式中:pi、qi和ri为结论参数。
第5层:将模糊集合转换为清晰的输出,该阶段采用所有规则输出相加的简单形式,如式(9)所示。

2.2 学习算法
设训练参数集为{xd j,yd j,Id j},j=1,2,···,n,Id j是输入参数等于{xd j,yd j}时控制器的实际输出。根据式(10)得

误差函数定义为

采用梯度下降的误差反向传播算法,主要调整前件网络中的ci、σi,如下所示。

式中:β为学习速率,0 <β<1。
BP算法搜索空间尺度大,容易造成局部极小,收敛速度慢,此混合算法有效地改善了其缺点[14]。学习算法流程图如图3所示。

图3 ANFIS学习算法流程图
2.3 ANFIS 的训练
在基于PI控制的仿真下提取83 127组训练数据训练自适应神经模糊控制器,训练数据分别为误差,误差的积分,交轴电流的值,利用混合学习算法训练的均方误差为0.115,ANFIS的参数设置如表1所示。
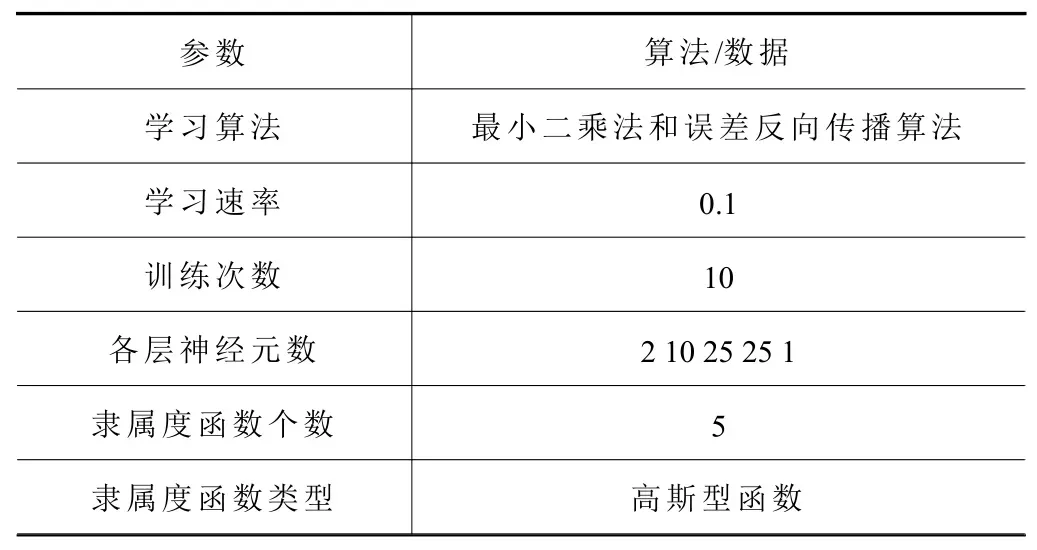
表1 ANFIS参数设置
3 仿真研究
3.1 控制系统框图及仿真参数
利用MATLAB仿真软件,在Simulink环境下建模与仿真。检验基于自适应神经网络的模糊控制器的有效性。
设置电机参数:交直轴电感 0.018 H,直轴主电感 0.095 H,电枢电阻 10 Ω,极距0.048 m,极对数3,动子及平台质量10 kg,励磁电流 5 A。
CELSM控制系统结构框图如图4所示,采用id=0的转子磁场定向的矢量控制,其中电流环采用PI控制,速度环采用ANFIS控制。

图4 控制系统框图
3.2 仿真结果与分析
图5、图6分别为ANFIS学习前后输入的误差的隶属度函数,图7、图8分别为学习前后输入误差的积分的隶属度函数,图9为学习后输入输出的映射关系,没有明显的台阶性,控制关系较平缓,减小了超调提高了控制精度,体现了网络的自适应能力。

图5 学习前e的隶属度函数

图6 学习后e的隶属度函数

图7 学习前ec的隶属度函数

图8 学习后ec的隶属度函数

图9 学习后输入输出映射关系
将ANFIS模块调用至仿真模型中进行仿真。与PI控制,RBF神经网络控制比较,分别从以下3个方面具体说明:
(1)空载启动时,给定运行速度为1 m/s ,在不加任何负载的情况下观察电机的速度和电磁推力响应曲线如图10和图11所示。

图10 空载速度响应曲线

图11 空载电磁推力响应曲线
PI控制下的超调量为17%,达到给定速度的时间为0.2 s,调节时间长且所需电磁推力过大。RBF神经网络控制调节时间较快,约0.057 s达到给定速度,而采用ANFIS控制的系统无超调量且进入稳态的时间最快,为0.04 s。综上采用ANFIS控制的系统启动性能优于前两者。
(2)在0.3 s,突加50 N的阶跃负载观察不同控制器的速度与电磁推力响应曲线如图12、13所示。

图12 突加负载扰动速度响应曲线

图13 突加负载扰动电磁推力响应曲线
PI控制受扰动影响最大,转速降落最大为3.7%,恢复给定速度的时间最长为0.1 s,RBF神经网络控制转速降落和恢复时间分别为1.8%和0.04 s,较好地适应负载变化,抗扰性能优于PI控制。ANFIS控制的转速降落最低为0.5%,恢复稳定时间最短为0.01 s,抗扰性能优于前两者。
(3)在0.6 s,突加正弦扰动来模拟端部、齿槽效应等不确定性外部扰动。令Fd=10cos(2πx/τ)N,观察电机的速度和电磁推力特性曲线如图14、15所示。

图14 突加正弦扰动速度响应曲线
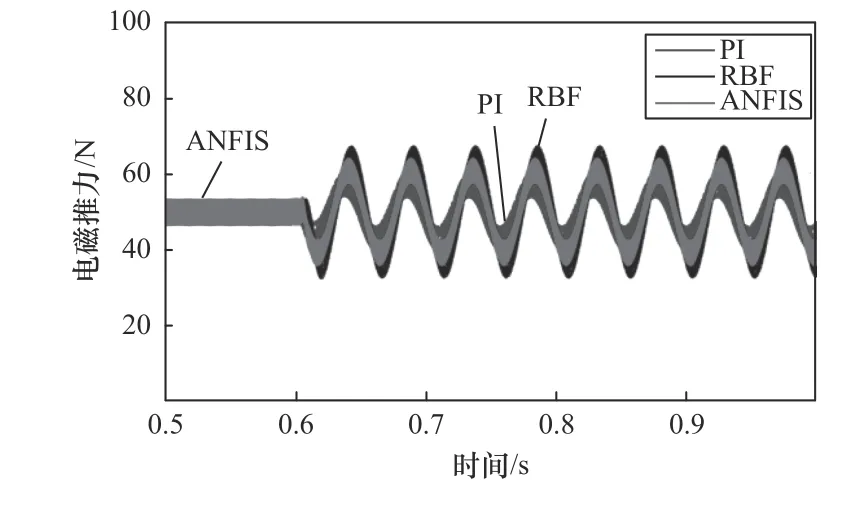
图15 突加正弦扰动电磁推力响应曲线
突加正弦扰动时,PI控制速度波动最大,误差为0.71%,不能较好地适应扰动变化,RBF神经网络控制波动较小,误差为0.34%,ANFIS控制的速度波动最小,误差为0.04%,具有良好的跟随性。综上采用ANFIS控制的系统在端部效应的影响下,速度变化更加平缓,提高了系统抗干扰的能力。
4 结语
(1)根据CELSM的特定结构和运行原理,推导其数学模型,并以此来设计ANFIS控制器。
(2)在传统模糊控制的基础上增加自适应神经网络,根据误差性能指标,对控制器参数采用混合学习算法寻优,实现模糊规则自动生成以及隶属度函数的自适应调整,改善系统动态性能。
(3)通过MATLAB仿真对ANFIS控制器的性能进行讨论,与PI控制,RBF神经网络控制进行比较,结果表明,ANFIS控制的空载启动时,稳定时间分别缩短了80%、30%,突加扰动时转速降落时间分别缩短了86.8%、73.5%,恢复给定速度的时间缩短了90%、75%。
综上所述,ANFIS控制器的抗扰能力强,启动速度快,鲁棒性好,能较好地控制磁悬浮系统。
