基于自适应小波降噪和Inception网络的齿轮箱故障诊断*
2022-10-11蔡超志白金鑫张仲杭池耀磊
蔡超志 白金鑫 张仲杭 池耀磊
(河北工程大学机械与装备工程学院,河北邯郸 056038)
在现代工业中,汽车、轮船和飞机等诸多机器的动力传动装置上都装有齿轮系统。由于长时间连续运转、工作环境恶劣等,齿轮容易发生磨损、断齿、点蚀及其他损伤。当齿轮箱发生异常或故障时,将会改变振动信号。通过分析振动信号,分离出与故障相关的特征信号,进一步分析分离出的特征信号,进而判断机械系统的故障类别[1-2]。
齿轮箱故障诊断过程一般包括数据采集、特征提取、特征选择融合以及故障识别4个步骤,其中,特征提取是一个关键步骤,特征提取直接决定着故障诊断结果的准确与否[3]。文献[4]提出了一种基于局部均值分解理论的解调分析方法,先利用局部均值分解将行星齿轮箱振动信号分解为一系列乘积函数,再对乘积函数做傅里叶频谱分析,成功提取了风机行星齿轮箱齿轮局部裂纹故障特征频率。文献[5]将一种改进的经验小波变换应用于行星齿轮箱振动信号解调分析,通过滤波将信号分解为一组调幅-调频单分量成分,提取出行星齿轮箱故障特征振动信号。但是,上述故障特征提取方法都需要工作人员经过长时间的学习,掌握大量的知识与经验。并且上述的特征提取方法对一些简单的信号很有效果,而对一些有噪声的复杂信号特征提取困难[6]。
现如今,随着计算机的发展,机器学习技术也发展迅速,也引发了更多的研究人员用机器学习模型对设备进行智能故障诊断的高潮,如反向传播神经网络(BPNN)和支持向量机(SVM)等。但是用BPNN、SVM等浅层学习模型对机器进行故障诊断时,模型提取的抽象特征决定了故障类型,然而在海量的高维数据下,这些模型的诊断准确率和和泛化能力明显不足[7-8]。近年来,深度学习作为机器学习领域中一个新的研究方向,因其强大的建模能力和表征能力,在人脸识别、语音识别以及故障诊断等领域取得很大的成果[9]。文献[10]对齿轮箱用堆栈式去噪自编码器(SDAE)进行故障诊断。文献[11]用深度置信网络(DBN)对轴承进行故障诊断。刘磊等[12]采用Inception网络结合双向长短时记忆对轴承进行故障诊断,并对凯斯西储大学轴承数据集进行实验验证,达到99.4%的诊断准确率。文献[13]采用Inception网络对印刷设备的轴承进行故障诊断,实验表明该方法的平均诊断精度达92.53%。然而,现有的故障诊断模型在理想环境下诊断效果较好,而设备在实际运行中总会伴有各种各样的噪声,这些噪声会干扰模型,使得故障诊断准确率降低。
本文利用自适应小波降噪原理与Inception模块的多尺度抽象特征提取性能[14],提出用基于自适应小波降噪和Inception网络的方法对齿轮箱进行故障诊断,该模型将采集的振动信号进行自适应小波降噪后利用Inception网络从降噪后的信号中自适应地提取较为全面的故障特征信息,实现齿轮箱故障诊断。先对信号进行降噪,然后设计Inception模块提取降噪信号中的多尺度特征,通过Inception模块叠加以及连接全连接层和Softmax分类器构成模型,并在多种齿轮故障情况下进行实验,证实了提出模型的有效性,并将此模型与几种相关模型进行对比,也证实了所提出模型的优势。
1 自适应小波阈值函数降噪方法
小波阈值降噪的关键是选取合适的小波阈值。若选择的小波阈值过大,可能将信号当中的有效信号和关键信号滤除,不能保留信号的原始特征;反之,如若选择的小波阈值过小,信号中的干扰不能充分滤除,导致信噪比较低。作为最常用的小波阈值,在一定程度上满足降噪需要,但由于缺乏适应性并不适用所有工况。另外,硬、软阈值小波降噪方法存在间断点和恒定偏差以及现有的阈值函数灵活性较差,因此本文采用自适应的小波阈值来对齿轮箱故障振动信号进行降噪,表达式为

式中:η为选择后的小波阈值;小波分解第j层的阈值为

其中:x为调节参数,εj为均方根误差,通常ε=w j,k为小波系数,median(*)为计算中值,N为信号长度。
假设原始的一组数据为a1=[a11,a12,···,a1n]T,以及每层分解后的一组数据a2,j=[a21,a22,···,a2n]T,将r1,2的计算,其中r1,2表示为每层小波阈值分解后的信号与原信号进行相关系数
其 中:Cov(a1,a2,j)为a1,a2,j的 样 本 协 方 差;Var(a1)、Var(a2,j)为a1,a2,j的样本方差,且|||r1,2|||≤1。综上,小波在进行每一层的分解得到的数据与原始数据相关性不同,小波阈值相应的取值也有所不同,根据相关系数自适应的选取小波阈值,提高算法的适应性。
自适应阈值函数公式如下。

2 Inception网络算法原理
2.1 卷积层
卷积层是用多个卷积核对输入数据进行卷积运算,卷积运算的公式如下。
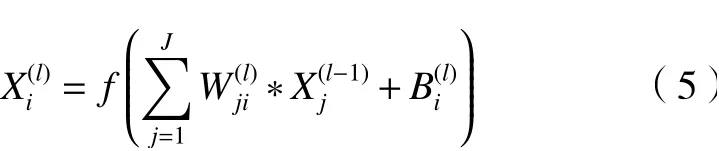
式中:*表示第l层的第i个卷积核与输入序列的卷积操作;为卷积核的偏置项;f是激活函数,可以使卷积核能够拟合非线性关系。
2.2 池化层
池化层通过计算局部最大值或平均值对卷积运算得到的特征序列进行降采样,在减小网络参数的同时过滤了部分冗余信息,计算公式如下。

式中:down为 降采样函数,通常使用最大池化与均值池化为池化层的权值与偏置项。
2.3 全连接层和Softmax层
全连接层和Softmax层连接在模型的最后阶段。卷积和池化操作后得到的特征图可以通过它叠加起来,最后用Softmax层计算并得出分类结果。Softmax层的的计算公式为

式中:Xl-1、Yl分 别是全连接层的输入和输出;Wl、b(l)i分别是全连接层的权值和偏置。
2.4 优化算法
对机器设备中某一部件进行故障诊断时,模型以及模型参数的选择可能会导致训练过程中发生过拟合、收敛缓慢以及不收敛的问题,因此在模型中的某些隐藏层中加入批量归一化(BN)层和随机丢弃(dropout)层。BN层是对每一层输入的数据进行标准化处理,如式(8)所示,将每层的输入数据转换为均值为1、方差为0的分布,这可以加快模型的计算速度。
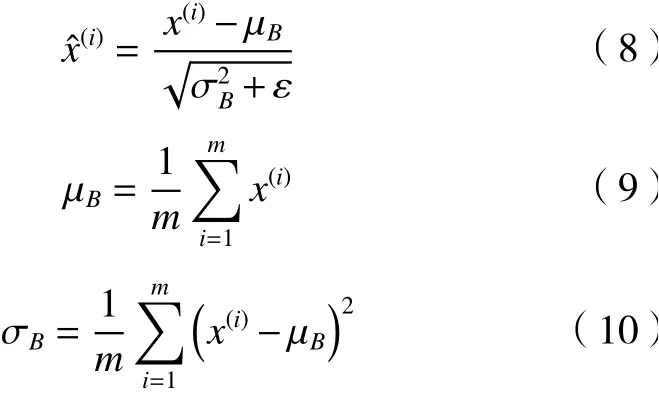
式中:xi为某一批次中的第i个输入向量;为标准化处理后的数据;µB是 某一批次的均值;是某一批次的方差;ε是一个很小的正数,用来确保根号内始终为正。
Droupout层是在计算过程中随机丢弃卷积层或全连接层中的一些神经元,如图1所示。训练过程中将神经元h2和h5失活,通过随机丢弃,可以减少模型中的参数,降低模型的复杂度,避免过拟合现象的发生,而在测试时,恢复失活神经元的连接,提高测试准确率。

图1 丢弃法示意图
2.5 Inception模块
Inception模块是将不同的卷积层和池化层通过并联的方式连接在一起,并且在同一卷积层中可以具有多个通道,每个通道能够包含不同尺寸及深度的卷积核,从而使网络能够在不同级别上提取特征。本文的Inception模块由不同尺寸的一维卷积核构成,如图2所示。该结构能从原始信号中提取到多尺度的抽象特征。另外,每个Inception模块的输入前都用(1,1)的卷积核对输入数据进行降维同时增加了网络的深度及非线性能力。每个卷积后加入BN层,以减少内部协变量转移,加速模型训练。
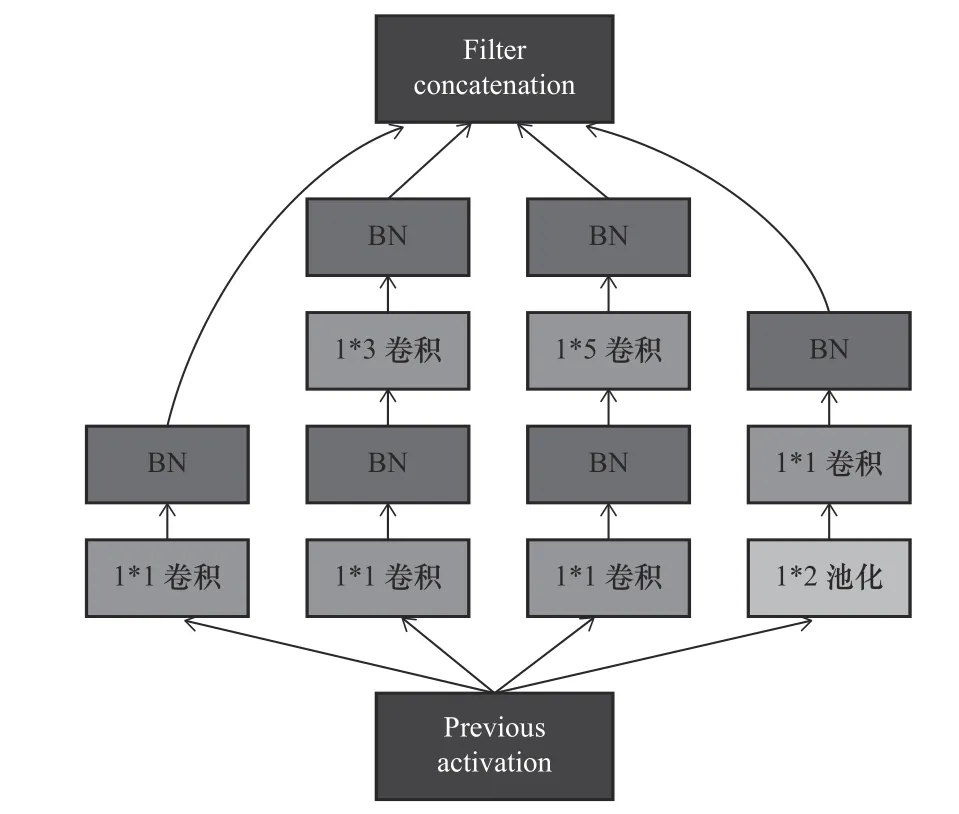
图2 Inception模块
3 故障诊断模型及流程
3.1 模型搭建
减少对故障诊断先验知识的依赖以及人为选择特征导致的误差。利用该特征,本文构造了一个Inception神经网络模型,利用该模型对齿轮箱进行故障诊断。该模型是一种对卷积层的深度及宽度进行扩展后得到的模型,特征学习能力很强。一个训练好的Inception神经网络模型可以通过卷积池化操作从原始振动信号中提取有用的特征,这些特征能表征设备的运行状况。模型结构如图3所示。
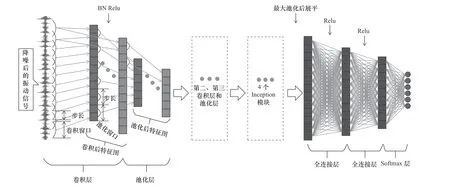
图3 模型结构
图3 模型结构
该模型将采样好的振动信号作为输入,先经过3个卷积层及池化层使得神经网络特征提取纵深增加,提高了特征提取能力。另外,对全连接层使用Dropout使经过全连接层的输出数据依某一概率随机失活,从而达到使网络具有更高抵抗数据丢失的能力,也可以避免在模型训练过程中发生过拟合同时提高模型的泛化能力。在模型中,对每个层的输入数据使用BN,可以避免训练过程中发生梯度爆炸或者梯度消失,也可以使用较大的学习率提高训练速度。经过卷积池化操作后,由Inception模块继续提取多尺度局部抽象特征。最后将特征融合后使用全连接层对特征信息与故障模式之间的关系进行映射,并通过Softmax分类器输出诊断结果。
在此模型结构中,不同的参数会对模型的诊断效果产生重大的影响。经过多次实验后,最终确定模型的主要参数如表1所示。
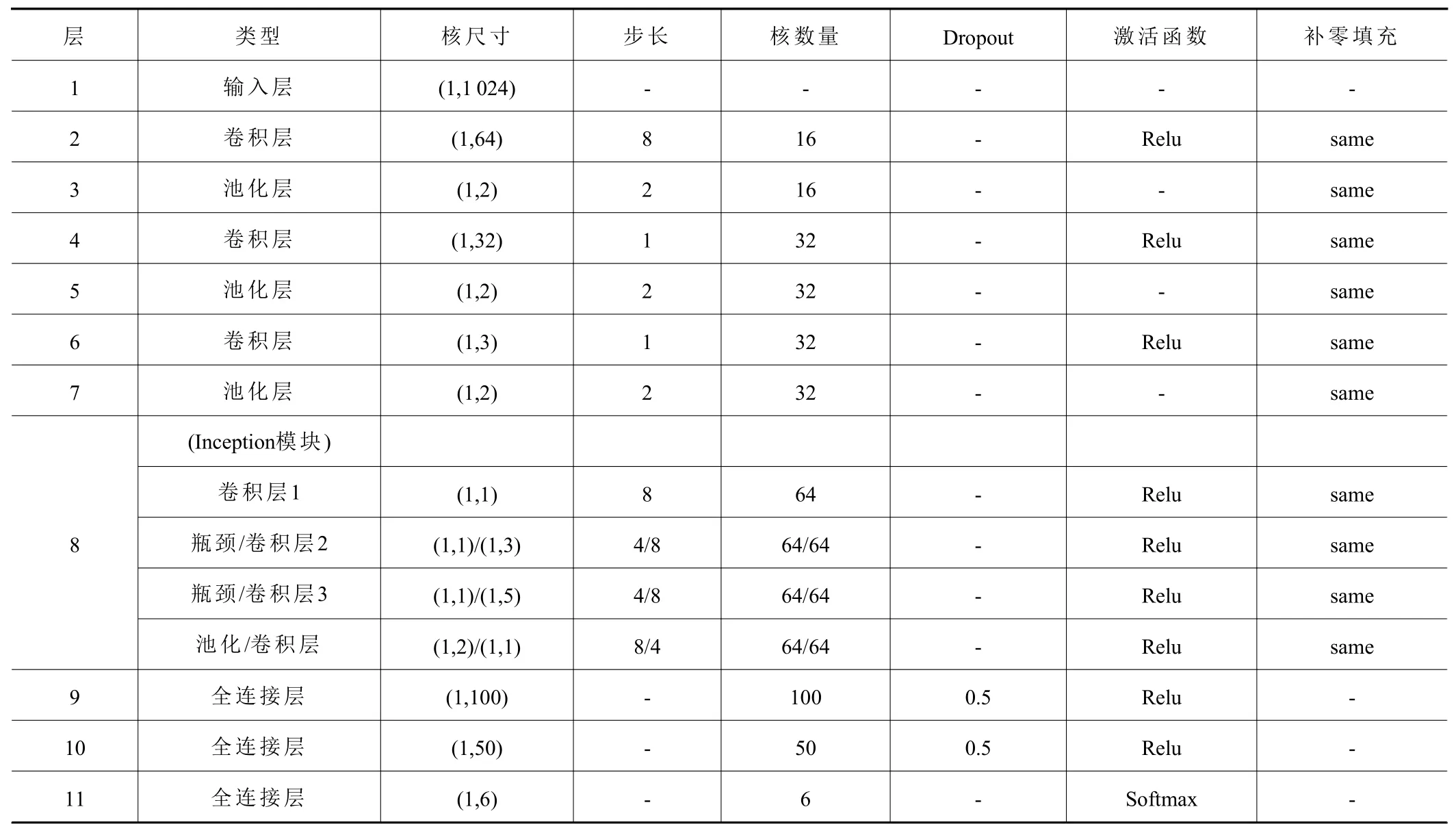
表1 模型参数
此外,模型的训练设置如下:训练轮数为200;批尺寸为256;优化器为adam;执行环境为单GPU。
3.2故障诊断流程
对齿轮箱进行故障诊断时,将传感器安装在输出轴电机侧轴承,用于采集振动数据,然后对采集的数据进行小波降噪并对降噪后的数据进行数据增强、归一化等预处理,最后通过模型分析得出故障类别。本文的故障诊断流程如图4所示。
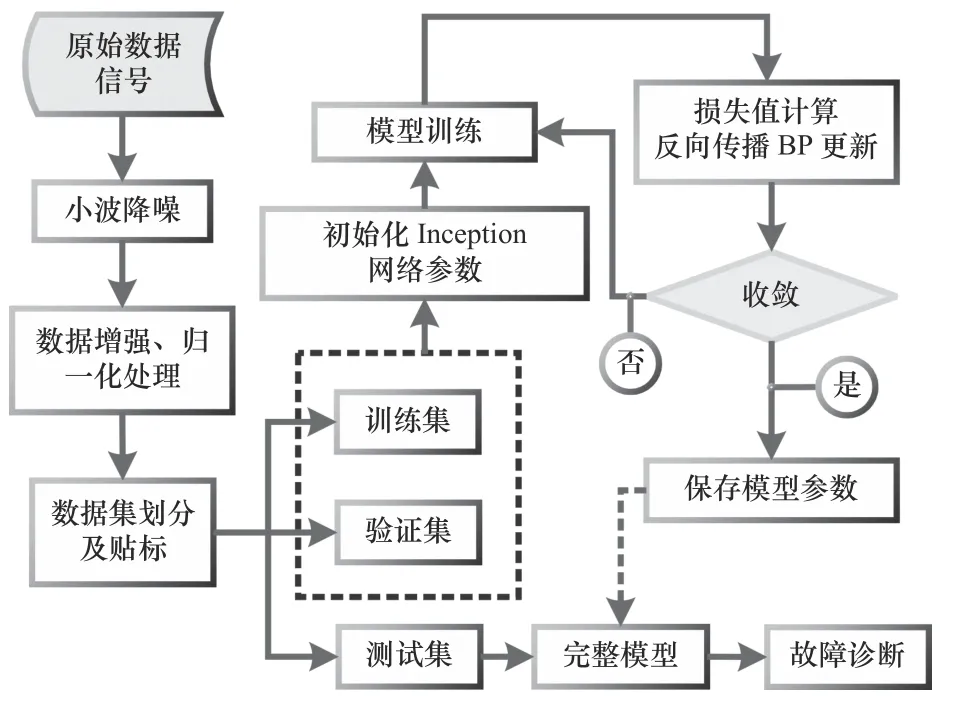
图4 诊断流程图
4实验与实验结果分析
4.1齿轮箱故障工况模拟及样本构造
图5a所示为本研究采用的齿轮箱故障试验台,可以模拟齿轮箱的不同健康状况。该试验台主要由交流电机、联轴器、齿轮箱以及制动器组成。电机的驱动功率为0.75 kW,标定转速为1 000r/min,通过变频器可控制其转速。联轴器用于连接交流电机与齿轮箱的输入端。齿轮箱是由两个相同齿轮组成的一级齿轮箱,用来改变力的传动反向,其内部输入级、输出级齿轮都是齿数为35、模数为2、压力角为20°的标准直齿轮。制动器用来模拟负载,通过对制动器加载不同电流形成不同的制动力矩来模拟负载的变化,本实验没有加载负载项。另外,试验台上所有轴承均为SKF606-2RSH型深沟球轴承且在本实验无故障发生。
从图5b中可以看出,两个齿轮在啮合过程中受力最大部分为齿根部和啮合点,因此本研究对齿轮箱内输出级齿轮进行了点蚀、磨损、断齿、点蚀和磨损、断齿和磨损5种最容易发生的故障进行诊断研究,有故障的齿轮由电火花加工制作而成。故障类型如表2所示。

表2 故障类型

图5 实验仪器与齿轮静力学分析图
实验过程中,将传感器安装在输出轴电机侧轴承采集信号,采集时通过变频器将电机转速调整为800 r/min,采样频率为5 120 Hz,每种故障采集76 800个样本点。
为了避免因为样本数量少而发生过拟合的现象,本实验用重叠采样的方法增强数据集。从原始信号采集训练集、验证集样本时,每一段信号与其后一段信号之间有重叠,而测试样本采集时没有重叠。重叠采样的方法如图6所示。重叠采样的方法可以通过调整采样窗口的大小来获得不同长度的样本,也可以通过调整滑动步长来最大限度获得足够多的样本。重叠采样法获得样本数的公式为

图6 重叠采样

式中:n为样本数量;m为 采集的数据点数;l为采样窗口的大小即样本长度;b为滑动步长。
实验中,样本长度为1 024,先无重叠采集出30个测试样本,剩下的数据点经过重叠采样得到训练集和验证集。将滑动步长设置为52,得到866个样本,再将重叠采样得到的866个样本进行无交集划分训练集与验证集,最终得到800个训练集样本和66个验证集样本。
为了数据处理方便,将样本数据映射到0~1范围之内处理,会使模型收敛更加便捷快速。归一化后各个故障的波形图如图7所示。
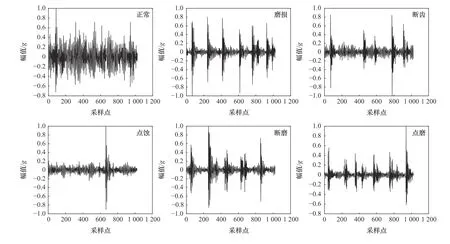
图7 波形图
4.2 实验结果分析
将4.1中构建的数据作为模型的输入,训练、测试模型。首先使用构建好的神经网络模型训练带有标签的训练集,然后用验证集调整模型的超参数以及对模型的能力进行初步评估,最后用无标签的测试集测试模型。图8为实验过程中损失函数值和正确率随训练次数的变化。根据图可以看出,模型在训练20次左右训练集时开始收敛,准确率提高,损失函数值减小。训练结束后,训练集和验证集的分类准确率分别达到了99.85%和99.92%,在训练过程中也没有出现过拟合,并且对测试集的表现良好。
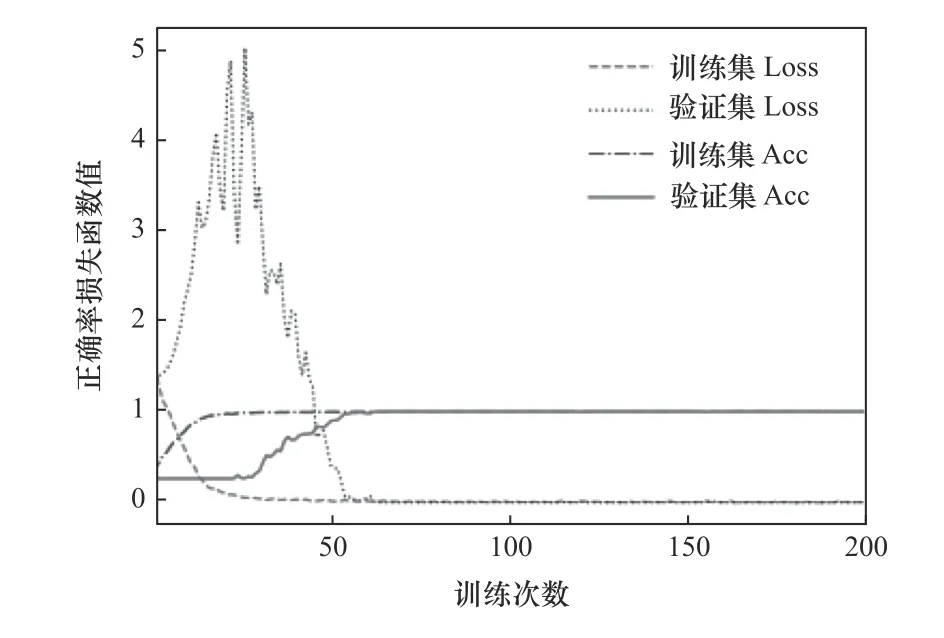
图8 正确率和损失函数值
图9显示了测试集的混淆矩阵,也可以看出该模型在测试集上表现良好,即分类效果良好。
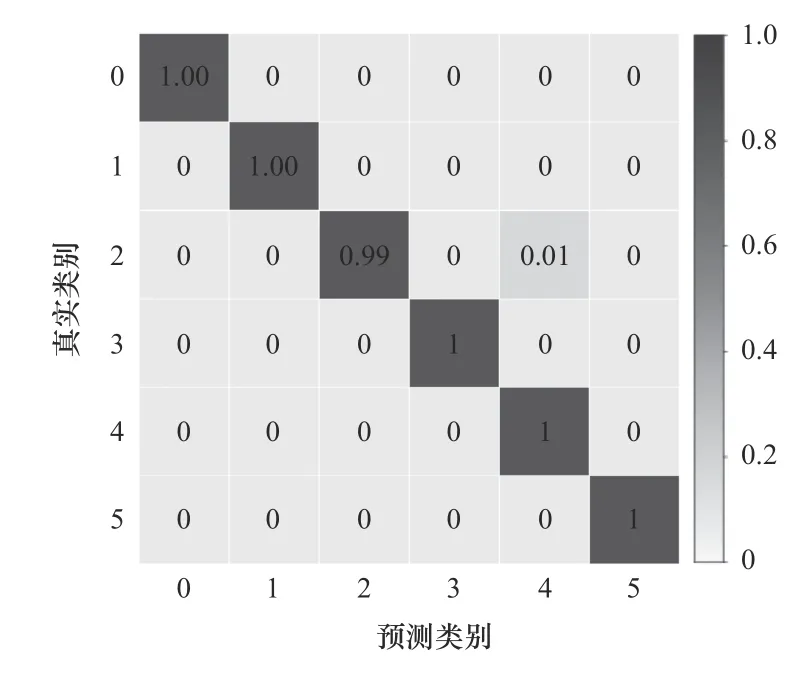
图9 混淆矩阵
为了验证Inception神经网络模型的优势,将其分别与1D-CNN、LSTM、WDCNN(deep convolutional neural networks with wide first-layer kernel)在 相同实验背景下对结果进行对比,各模型训练结果如表3所示。
从表3中也可以看出,Inception网络模型比其他各模型的训练集准确率及验证集准确率都高,而且在此实验背景条件下,该模型在测试集的准确率达到了99.89%,都充分证明了此模型的优越性。
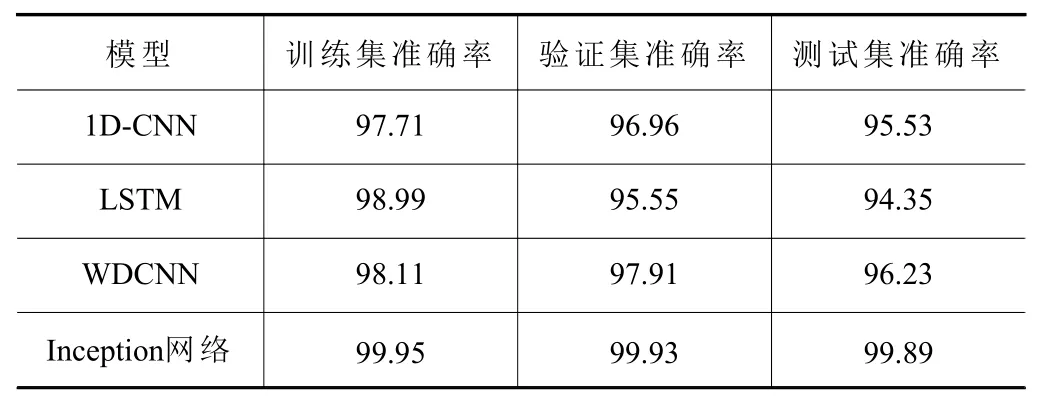
表3 各模型实验结果
4.3 抗噪性分析
由于采集的数据是在实验室条件下,为模拟实际工作环境,本文将测试集加上不同程度的加性高斯白噪声,然后对加噪后的信号进行自适应小波降噪。小波降噪时分解层数过多与过少都不合理,分解层数过多会造成重构信号的失真,分解层数过少则会降噪不彻底。本文将加噪后的信号进行3层小波分解,可以有效降低一些噪声并且重构信号不失真,再加上Inception网络的强大特征提取能力,可以在即使含有一些噪声的信号中提取出故障特征,可以弥补分解层数过少造成的降噪不彻底。图10为对点蚀故障情况下采集的信号加上-2 dB噪声下的信号及降噪后的信号,可以看出,降噪后信号相对于加噪后信号振动冲击较为明显,噪声污染降低,与原始信号重合度变高。对测试集加上-4~6 dB的噪声,测试模型在噪声环境下的识别率。图11为该模型有小波降噪和无小波降噪对测试集的识别率。
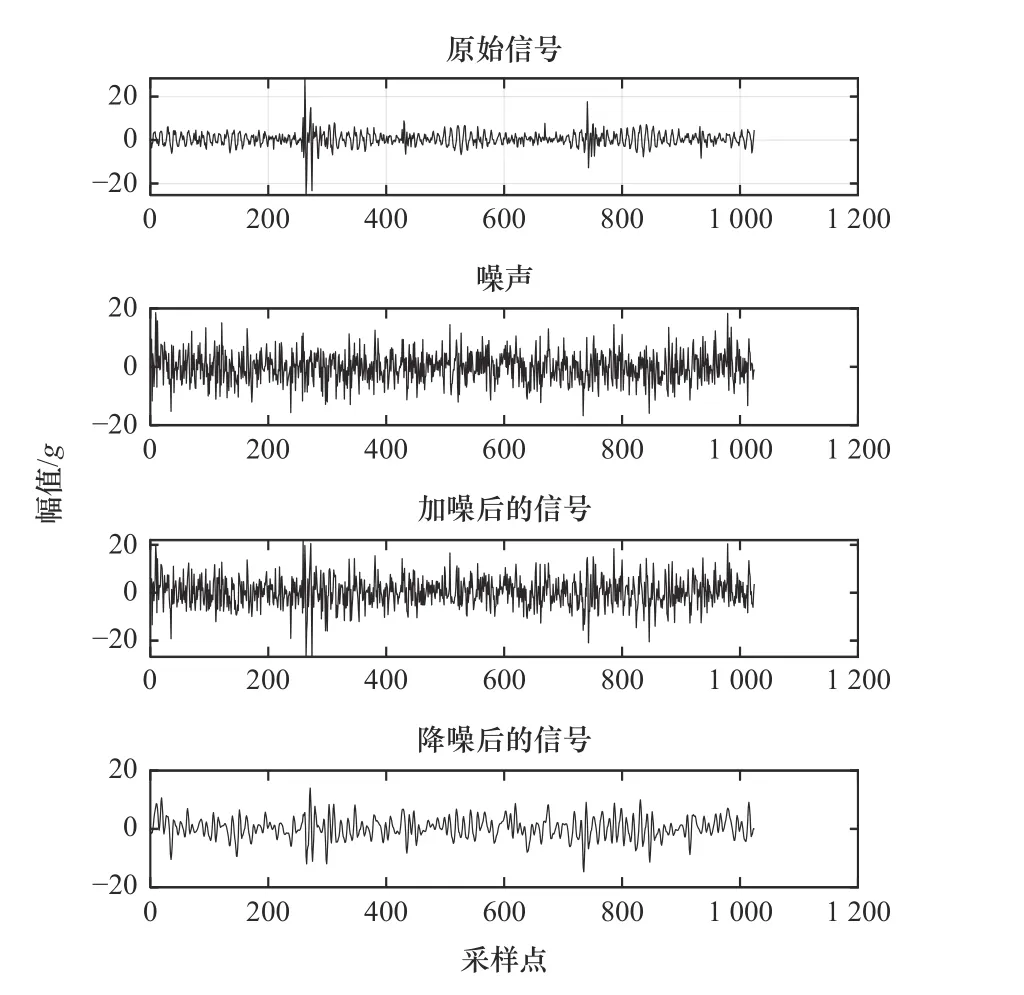
图10 点蚀故障系列信号

图11 有无小波降噪对比
本文模型与1D-CNN、LSTM、WDCNN(deep convolutional neural networks with wide first-layer kernel)在-2 dB噪声环境下的识别率对比如图12所示。

图12 不同模型在—2 d B环境下的准确率对比
从图11、图12可以看出,含有小波降噪的Inception网络比不包含小波降噪的网络以及其他常见模型的识别率都高,抗噪性好。
5 结语
针对数据驱动的齿轮箱故障诊断过程中存在噪声污染、特征提取复杂、计算过程复杂等问题,本文提出了一种基于自适应小波降噪和Inception网络的自适应特征提取的齿轮箱故障诊断模型,即一种先经小波降噪再通过Inception网络自适应提取多尺度特征并对各层输入引入BA、合理使用Dropout以及使用合理的激活函数和优化器等结构的模型,该模型能准确识别出齿轮箱的故障类型。通过理论分析和实验验证,得到了以下结论:
(1)针对采集的原始信号中含有噪声的问题,本文采用自适应小波阈值去噪,可以有效去除噪声,保留明显的故障特征。
(2)本文利用Inception模块的多尺度抽象特征提取性能更好地提取故障特征,克服了单一CNN模型提取特征尺度不够丰富的问题。
(3)为了得到更多的样本,用重叠采样的方法进行采样,解决了小样本训练容易出现过拟合以及训练好的模型泛化能力弱的不足。
(4)由实验结果可知,基于小波降噪和Inception网络的齿轮箱故障诊断模型可以对齿轮不同类型的故障进行确分类。
