车载激光雷达移动测绘系统在高精度地图采集中的应用
2022-10-11宋鹤宁刁淑然
宋鹤宁 刁淑然
(1. 沐城测绘(北京)有限公司, 北京 100102;2. 北京诚易达通测绘所, 北京 100102)
0 引言
随着智能导航、自动驾驶技术的发展,高精度导航地图的采集愈发关键,对于自动驾驶来说,高精度导航地图就是核心大脑。其采集方法多种多样,可以通过传统测绘的方式也可以通过三维扫描的方式获取,但作业效率很低。随着互联网地图服务、智慧城市建设、智能导航的发展,对数据获取提出了新的要求——既要快速全面获取高精度高分辨率地理信息,又要对地理信息进行及时、动态、自主更新,传统的数字化测量工具和手段很难满足该需求。目前激光测量技术在测绘工作中的应用越来越广泛,其独特的直接获取目标物体三维点云数据的特点,与传统测绘技术相比具有明显优势。
国内最早研究高精度地图的是百度,目前越来越多的企业开始进行高精度地图的布局,如四维图新、高德、滴滴出行、中海庭、魔门塔、宽凳智云、江苏晶众、智途科技、华为等。通过高精度地图采集车和编辑平台,目前可生产出绝对精度20 cm的地图数据,整体处于准备量产阶段。不同于地图厂商,宽凳科技、滴滴出行(桔视系统)在数据采集上引入众包模式进行高精度地图采集。
从行业发展来看,由于技术壁垒和资金壁垒较高,截至2020年3月,我国具备导航电子地图甲级测绘资质企业仅22家,2020年和2021年获得资质批准的为3家,分别是沈阳美行科技有限公司、中交宇科(北京)空间信息技术有限公司、北京航天宏图信息技术股份有限公司。技术相对领先的主要有三家公司,四维图新、高德和百度,基本完成我国30多万km高速公路和城市快速路的地图采集工作。
车载雷达移动测量技术是当今测绘界最前沿的科技之一,采用激光雷达技术和全球定位系统(global positioning system,GPS)/惯性测量单元(inertial measurement unit,IMU)组合导航定位技术,具有高效率和高精度的特点。目前业内做自动驾驶的行业领军企业都在采用车载激光雷达移动采集系统作为高精度导航地图(车道级道路底图)的首选采集方式,例如,高德、百度、四维图新、易图通等传统图商,此外还有华为、滴滴、京东、美团、顺丰、中海庭等企业。而车道级道路底图是实现自动驾驶的关键所在,由于普通地图的导航定位精确度在5 m左右,完全不能满足自动驾驶的需求。高精度导航地图凭借“高精”的特性,可实现厘米级精确定位,是自动驾驶车辆的重要组成部分。通过车载移动测量系统采集的数据融合后得到的三维点云,并绘制道路底图,可以得到所需要的车道级道路底图,可作为无人驾驶汽车的导航依据。本文将通过车载移动测量系统获取激光点云数据,并以此为基础制作高精度地图数据,为同类型的测绘工程提供借鉴。
1 车载激光雷达移动测绘系统的优缺点
1.1 激光雷达测绘系统具有以下优点
相比传统测量技术,激光雷达在测量方式和测量成果方面均有新的技术革新,可以获取精准的三维坐标,不再需要通过数字摄影去获得相应的影像,因此就简化了整个测绘工作的内容,同时也保证相应的要求,从而降低了相应的工作成本。主要技术优势是效率高、点云密度大、测量精度高、主动式测量、外业工作量低、具有多回波技术等。激光雷达测绘技术是一种比较先进的测绘手段,其在测绘工作中发挥着巨大的作用和优势。车载激光雷达移动测绘系统具有如下优势:
(1) 全天候作业,测绘速度快,安全操作,应用范围广泛;
(2) 激光点云数学精度高、采集密度大,数据非常详细,可获得高精度地物表面点云信息和高清影像数据;
(3) 非接触性主动测量,抗干扰性强,附加的测量信息多,如影像、色彩等;
(4) 激光点云穿透性强,穿透植被直达地面,精确高速的数据捕获、减少数据采集和分析的回转次数;
(5) 一次扫描后可以在点云模型上进行反复的“模型测绘”,成图周期短。
1.2 车载激光雷达测绘系统的缺点
(1) 系统平台集成成本高,对于中小企业来说是相当大的经济负担;
(2) 对于路面的测量要求车载激光雷达测绘系统可以满足,但是对边皮外侧区域存在盲区;
(3) 由于车辆的限制,车载激光雷达测绘系统相比机载激光雷达测绘系统有较大限制。
2 车载三维激光扫描系统的工作原理
2.1 系统集成
本项目中使用的车载三维激光扫描系统是由上海华测导航技术股份有限公司开发研制,如图1所示,以带车顶行李架的越野车为平台,集成安装了1台奥地利瑞格(RIEGL)公司的激光扫描仪VUX-1HA(参数如表1)、1台Ladybug5全景相机、1台霍尼韦尔4 930惯性导航设备。

表1 RIEGL VUX-1HA参数

图1 车载移动测量系统集成平台
2.2 基站设置
方案1:架设静态GPS基站,为保证移动测量系统精度,在测量过程中单个基站覆盖的范围不应超过半径为10 km的区域。
方案2:免基站技术,采用千寻位置或者系统集成商提供的免基站服务,在采集外业开始前提交测区范围文件获取免基站服务的虚拟基站位置及作业时间段。
2.3 工作原理
激光扫描系统:通过高速激光扫描测量的方法,直接获取高精度的数字表面模型,还可以同时获取回波、强度等数据为目标识别、分类提供辅助数据,由此快速复建出被测目标的三维模型及线、面、体等各种图件数据,车载激光测绘技术在进行实际测绘应用中,主要是通过激光扫描系统进行测绘实现的;
定位定姿系统(position orientation system,POS):用于获取激光雷达的空间位置与姿态,还可以提供精确的时间基准;
相机系统:获取车辆行驶轨迹周边的彩色数码影像;
同步存储控制系统:用来实现激光扫描系统、POS系统(GPS/IMU)、相机系统的数据同步采集及存储等功能。
车载激光雷达移动测绘系统的传感器被固定在移动平台上,通过设备无线网络通信技术(WiFi)连接平板电脑,通过平板电脑安装的同步控制系统触发脉冲,保证所有传感器与平台的运动和姿态同步进行采集与存储,从而实现三维点云信息和影像信息的快速获取。各子系统关系如图2所示。图中时间流与数据流是车辆在同一位置的时间与三维数据唯一对应的信息,是数据预处理中点云解算的依据,通过解算获取车辆在任意时间对应的三维信息。
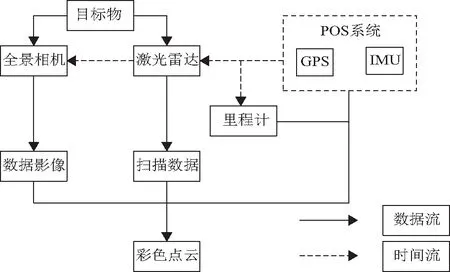
图2 车载激光雷达移动测绘系统关系
2.4 移动平台速度计算
系统激光雷达的标定线扫速度为250线/s(可调节),则采集两线的时间为0.004 s,按采集需求线间距最大为10 cm,则车速为3 600/0.004×0.000 1=90 km/h。如设置线扫速度为200线/s,则车速不得大于72 km/h。
3 高精度地图采集要求
(1) 多车道道路每条车道都覆盖,建议高速路为2车道时车辆行驶外侧车道,高速路为3车道时车辆行驶中间车道;
(2) 高速收费站优先采集中间位置ETC通道;
(3) 考虑软件运行原因,单条轨迹长度不超过200 km;
(4)点云绝对精度:
①一级精度(平原地区):平面精度5 cm,高程精度10 cm;
②二级精度(山区):平面精度10 cm,高程精度20 cm;
(5)点云密度要求:
①纵向密度(车辆行驶方向):小于等于10 cm;
②横向密度(垂直行驶方向):小于等于2 cm;立面密度:小于等于10 cm;
(6) 高速和城市快速路等封闭道路的分歧和合流前后的导流带头尾不能有空洞,直线位置空洞小于80 m,弯道匝道空洞小于20 m;
(7) 影像密度不超过25 m/张,时间触发时保持1 s/张,单张影像分辨率大于300万像素。
4 高精度地图测绘
本项目测绘范围为东五环(广泽桥-七棵树桥)双向车道,单向为3车道,车流量大,对外业采集有一定影响,尽量避免与其他社会车辆并排行驶。车载激光雷达移动测绘系统工作流程主要包括准备阶段、数据采集、数据预处理、数据后处理等,如图3所示。
4.1 数据采集
数据采集外业开始前,提交免基站服务申请,使整个外业采集时间包含在免基站服务的时段内,安装设备时,设备架拉出的长度与标定设备参数时的长度一致,可在设备架上不同位置做标记,初始化设置主要是使激光雷达和惯导进行初始化,具备工作条件。采集开始前开启设备后静置5 min,禁止开关车门等引起车辆震动的操作,然后车辆进行“8字”行驶3 min,在结束采集前需要静置5 min再关闭设备。
正式采集开始前检查车辆状况是否正常,激光雷达和全景相机是否处于工作状态,车轮编码器安装是否牢固,在进入测区200 m前开始采集点云数据。车辆采集时行驶速度不超过60 km/h,保证点云的密度,尽可能减少因车辆并排行驶造成的点云空洞。
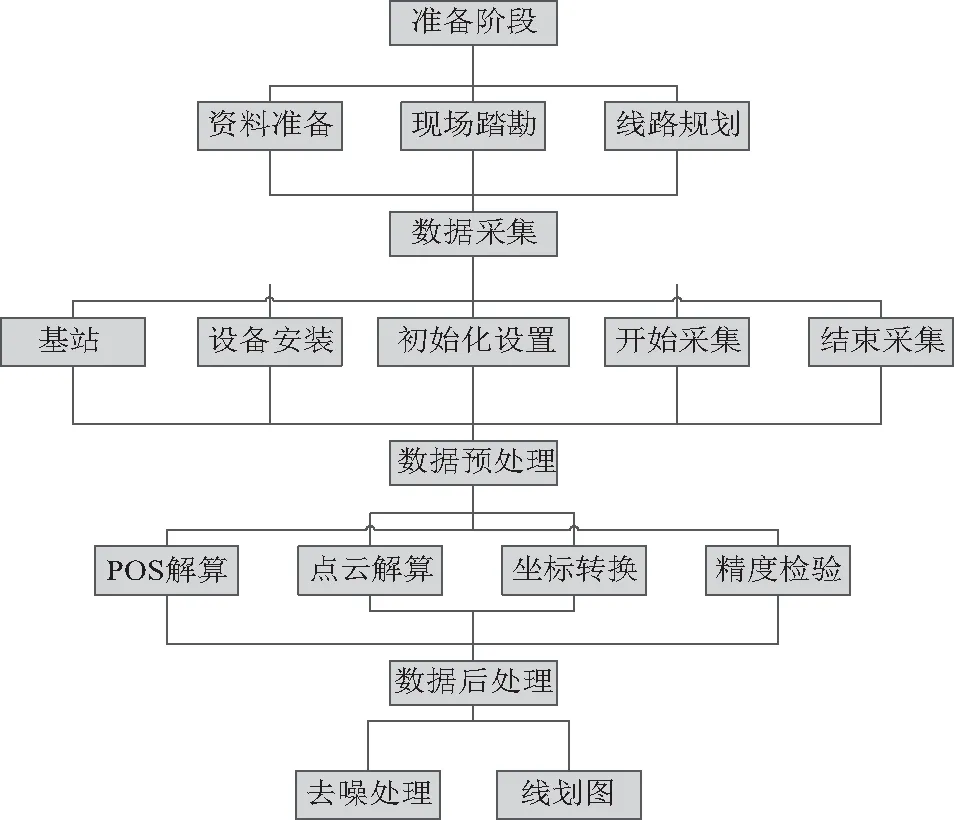
图3 车载移动测绘系统工作流程
4.2 数据预处理
数据处理原理:采集系统基于激光雷达获取距离、位置、姿态等原始数据生成满足设计精度的点云数据,由于激光雷达的采集频率远高于GPS和IMU传感器,而数据处理需要得到任意时刻激光波束的姿态信息和空间位置信息。用时间来进行数据配准,结合回波距离、扫描角度信息,可准确求得点云三维坐标,并将扫描坐标系下的数据转换到大地坐标系下。
点云解算流程:使用Inertial Explorer软件(简称IE)进行点云轨迹解算,Inertial Explorer软件用于处理高精度POS数据,解算速度快,数据精度高,是业内公认的最优秀的POS数据处理软件之一。车载POS数据包括GPS数据和惯导IMU数据,先将基站和移动站数据转换为GPB格式文件,之后需要添加Master基站数据、Remote移动站数据以及IMU惯导数据,进行GPS/INS组合解算紧耦合处理,得到高精度的位置和姿态数据。下一步使用CoPre软件进行点云解算,包括点云初计算、精度检查、点云/轨迹修正等。CoPre软件是华测自主研发的数据预处理软件,其主要功能包括点云解算、照片整理、点云着色、全景拼接、深度图生成、坐标转换。点云数据如图4所示。

图4 点云数据
4.3 提取车道线
依据点云数据提取道路边线、车道线、应急车道线,依据实际道路标记线划出虚线、实线,如图5所示。

图5 车道线提取
4.4 精度评定
移动测量系统的点云精度将主要由全球导航卫星系统定位误差、激光测距误差和POS姿态角误差决定。本项目使用千寻云迹账号在道路分歧路口的明显道路标记线或导流线处设置验测点共12个,使用华测i90惯导实时动态载波相位差分技术(real-time kinematic,RTK)对控制点进行施测,如图6所示。通过检查点对应的点云坐标进行对比,依计算的平面中误差为±3.6 cm(≤±5 cm)、高程中误差为±5.2 cm(≤±10 cm)。《车载移动测量数据规范》(CH/T 6003—2016)中规定,车载激光点云点位精度及高程精度分别是:特级0.05、0.02 m;Ⅰ级 0.1、0.05 m;Ⅱ级0.3、0.2 m;Ⅲ级0.5、0.3 m。可见本项目点云精度达到Ⅱ级精度要求。

图6 验测点选取
5 结束语
激光雷达测绘技术在我国的各个行业都被广泛运用,如基础测绘项目、精密测绘项目、矿山测绘、森林植被、城市规划、电力管网调查、地质灾害监测等。通过实际项目分析,车载激光雷达移动测绘系统具有全天候、非接触、测绘速度快等优点,使用此系统采集高精度导航地图是最方便、最快捷、最高效的方式,即提供了高精度点云数据又能提供全景影像,具有高密度、高精度、高效率、低人工成本的特点。但个人认为系统仍有弊端,如系统初始化的“8”字行驶,在实际操作中很难有场地提供此操作,存在交通安全隐患,且存储数据量巨大,惯性导航系统不能长时间有效工作,点云处理软件不通用等。相信随着技术水平的提高,车载激光雷达移动测绘系统会解决以上问题,会应用于更广泛的领域。
