基于无人机倾斜摄影测量的精细化三维模型精度分析
2022-10-11毛志芳张华平
毛志芳 张华平
(江西省地质局地理信息工程大队, 江西 南昌, 330000)
0 引言
我国正处于城镇化进程不断加快发展的阶段,对于地理信息产业要求越来越高。只有建立一个统一的数字城市地理空间框架,才能实现各种信息集成,满足城市科学、稳定、快速的可持续发展需求。
三维信息采集和三维模型的大批量构建对数字城市建设极其重要。构建三维模型的方法有很多,比如手工建模、三维激光扫描建模、机载雷达建模、倾斜摄影测量建模等。近年来,随着无人机技术的发展,倾斜摄影测量三维建模方法突破了传统建模方法数据采集慢、建模周期长的缺点,大大提高了建模效率,同时也降低了建模成本,极大地提高了倾斜模型在各行各业的应用发展前景。因此,研究倾斜摄影三维建模技术精度影响因素对于大规模建立实景三维模型、推动数字城市建设意义重大。
1 倾斜摄影三维建模的基本原理与方法
使用无人机倾斜摄影测量技术进行三维模型的构建主要分为两步:野外数据采集和三维模型构建。
野外数据采集包括控制点布设与量测、使用无人机平台搭载镜头采集带有三维信息的航摄相片。尽管一些学者研究出了免像控三维建模的方法,但是这种建模方式往往精度较差,模型效果也不好,因此本文仍选择布设与量测像控点。采集航摄相片主要有两种方式:一种是单镜头采集方式,一种是五镜头采集方式。两种方式原理相同,都是采集垂直角度和前、后、左、右4个倾斜角度5个方向的地表影像(图1),只是外业作业方式不同,工作效率也不同。单镜头采集方式采用搭载可旋转方向的单镜头无人机通过井字飞行方式分别采集五个方向的地表影像,硬件成本低,但是航摄工作更加繁复,效率也低;五镜头采集方式采用搭载五镜头的无人机同时采集5个角度的地表影像,硬件成本相对较高,但工作效率大大提高,更有利于需要大范围野外采集航摄数据及需要进行大批量倾斜模型构建的项目。
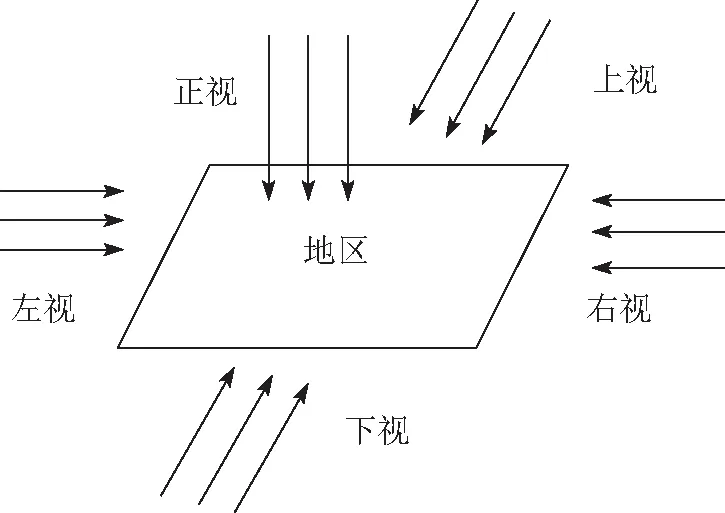
图1 五镜头采集方法示意图
随着技术的发展,建模软件也开发得比较成熟,自动化程度较高,模型构建方法主要包括以下5个步骤:影像稀疏匹配、空中三角测量、影像密集匹配生成密集点云、通过密集点云构建三角网,自动纹理映射生成实景三维模型。
2 控制点数量和航高对倾斜模型的精度影响
2.1 实验设计
为了能够更好地模拟城市精细化三维建模,实验测区需包含城市绿地、硬化道路、多层建筑物、桥梁等城市的基本要素,故选择位于某市大学校区内的测区A,如图2所示。该测区以一图书楼为中心,是边长为300 m的正方形测区。

图2 测区示意图
控制点数量和航高的设计对城市精细化建模内、外业工作效率影响较大,同时也影响着倾斜模型的精度。为了分析控制点数量与航高对倾斜模型精度的影响,本文设计了4种控制点布设方案和5种不同的航高方案交叉生成20种模型。在300 m的正方形测区内均匀布设25个测点,分别选取3、6、9、12个测点为控制点,其余点为检测点,用于对倾斜模型精度的检测,如图3所示。使用全站仪和水准仪测出25个测点的坐标。

图3 控制点布设方案
本实验使用六旋翼无人机搭载五镜头采集地表影像,航高分别设定为80、100、120、140、160 m,旁向重叠度为75%,航向重叠度为80%,共采集了905张相片,飞行方案如表1所示。
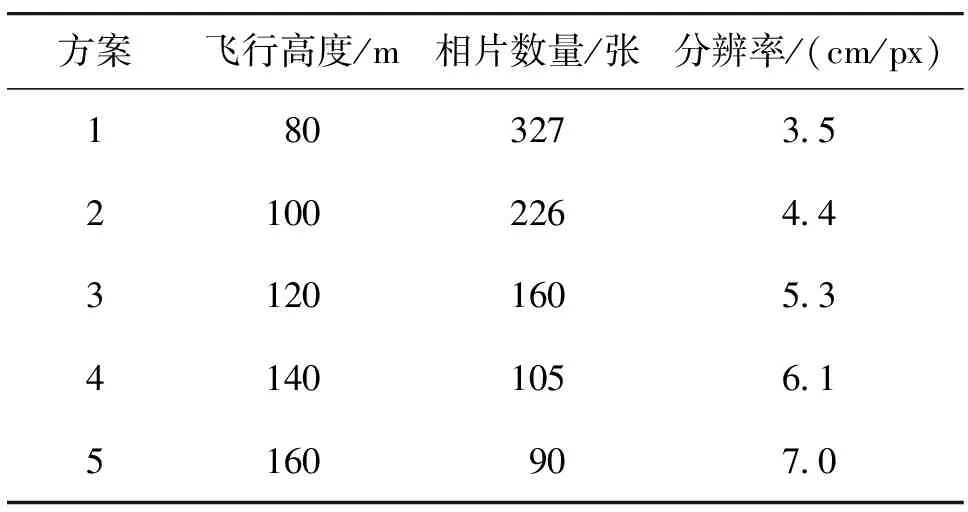
表1 飞行方案
2.2 精度分析
本实验设计了4种点位布设方案和5种航高设计方案,共交叉生成了20种倾斜模型,通过计算检查点的均方根误差即中误差,对这20个模型分别进行模型整体精度评价,结果如图4所示。
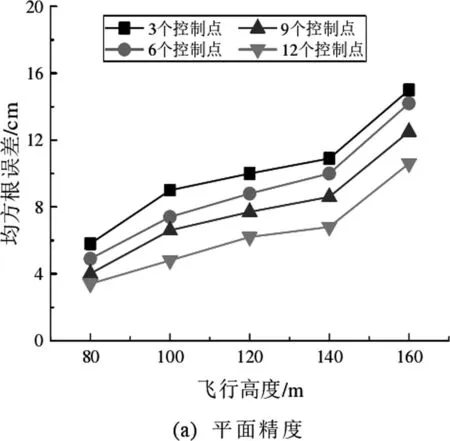
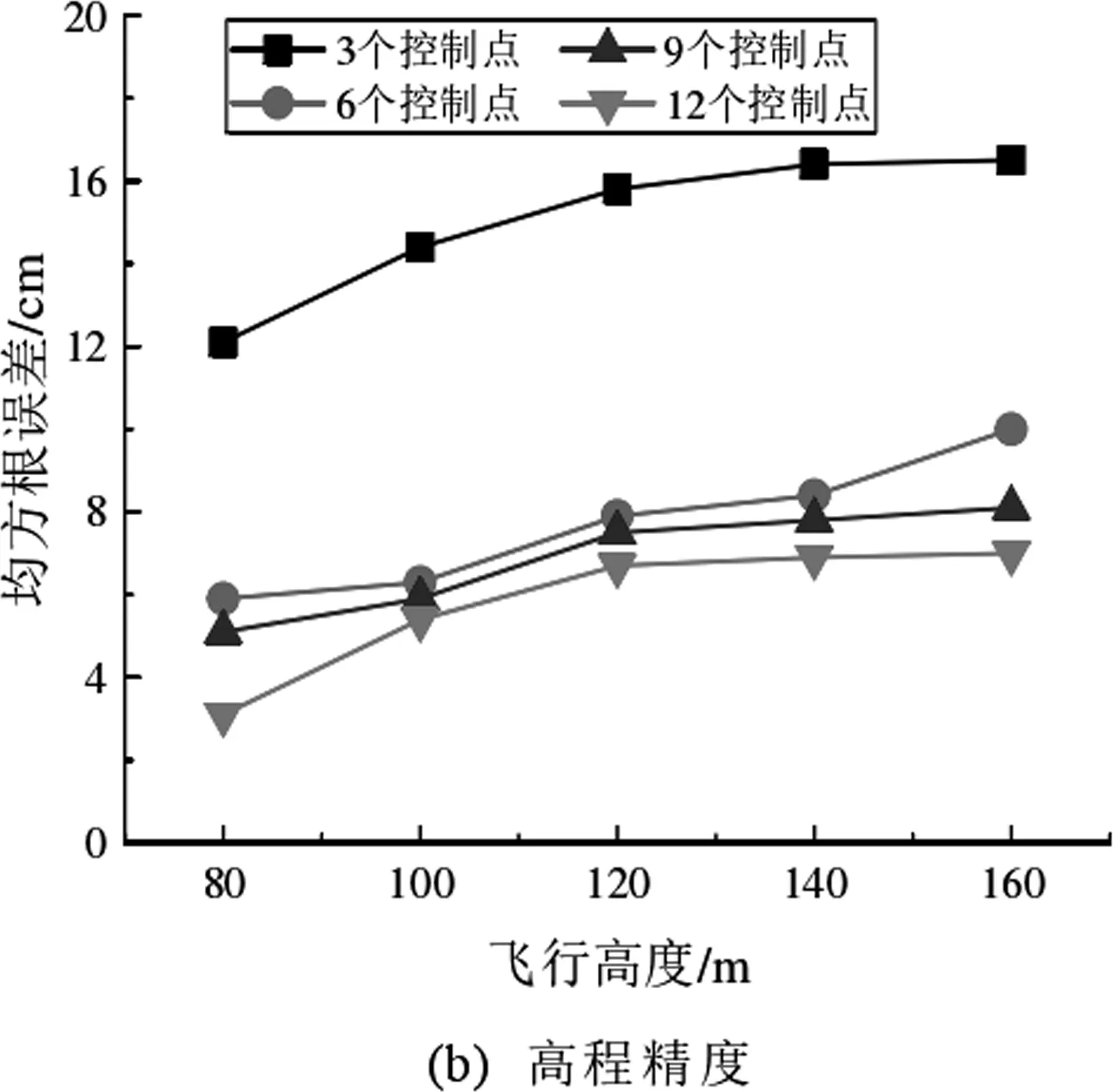
图4 模型精度分析图
经统计分析可知,20个实验方案中,当航高为80 m,控制点数量为12个时,倾斜模型精度最高,平面精度为3.4 cm,高程精度为3.1 cm;当航高为160 m,控制点数量为3个时,倾斜模型精度最低,平面精度为14.9 cm,高程精度为16.5 cm。参照CityGML标准对精细模型的精度要求,20个倾斜模型均满足标准中要求的0.2 m的平面和高程精度。
由图4可知,当飞行高度相同时,倾斜模型的平面精度和高程精度随控制点数量的增多而提高;当控制点数量相同时,倾斜模型的平面精度和高程精度随飞行高度的降低而提高。当控制点为3个时,倾斜模型已经有较好的精度。随着航高的降低,虽然倾斜模型精度会提高,但是无人机获取的相片会增多,内、外业工作效率都会相应降低。因此,在满足项目精度要求的前提下,适当选择稍大的飞行高度,能够提高工作效率、节约项目成本。
3 POS数据对倾斜模型的精度影响
3.1 实验设计
空中三角测量是构建倾斜模型最重要的步骤之一,它有像控点定向和定位定姿系统(position and orientation system,POS)定向两种绝对定向方式。POS数据记录了无人机在拍照时的坐标信息,由于风力等因素,往往精度不高。本实验设计研究了在空三测量的过程中,POS数据能否辅助像控点进行绝对定向,对倾斜模型精度有无影响。选择位于某市大学校区内的宿舍楼为测区B,研究对象为测区内的七栋16 m高的五层宿舍楼和数栋单层建筑,如图5所示。

图5 测区示意图
本实验使用六旋翼无人机搭载五镜头采集测区影像,航高设定为100 m,旁向重叠度为80%,航向重叠度为85%,共采集了1 440张相片。在测区均匀布设42个测点,并用全站仪与水准仪量测测点的坐标,选择其中13个为控制点,如图6所示,另外29个为精度检测点,其中9个为平面检测点,20个为建筑上容易辨识的房角点。
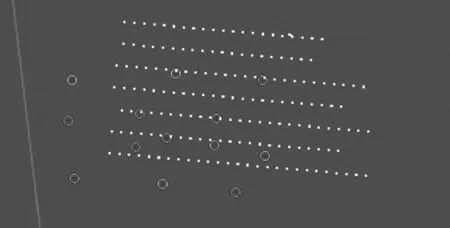
图6 像控点与航带分布图
通过内业数据处理,进行实景三维模型的构建,共构建了两个倾斜模型,一个有POS数据辅助,一个无POS数据辅助,两个模型均构建完整。但是在细节处两者有所不同,如图7所示,无POS辅助的三维模型局部细节处能看到明显的扭曲,有POS辅助的模型则更加精细。

(a)有POS辅助三维模型

(b)无POS辅助三维模型
3.2 精度分析
将29个检测点分为两组,分别是9个地面检测点和20个房角点检测点。针对有无POS辅助构建的三维模型,分别对这两组检测点进行精度分析,结果如表2、表3所示。
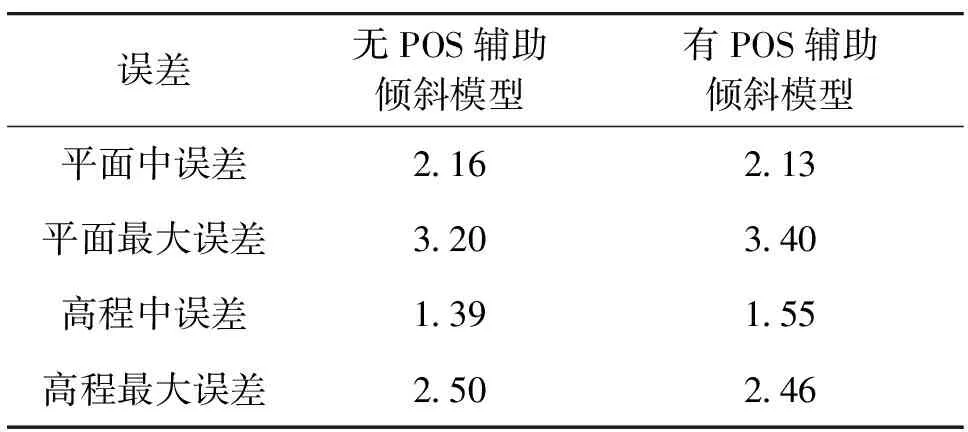
表2 地面检测点精度表 单位:cm
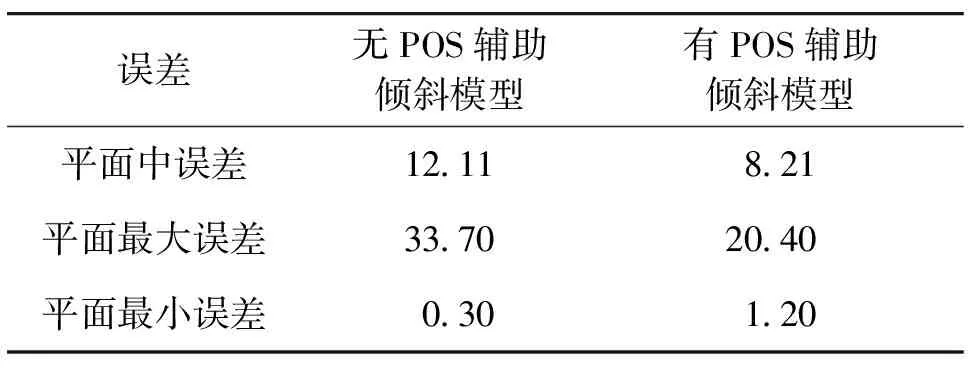
表3 房角检测点精度表 单位:cm
由表2可知,针对地面检测点来说,有POS辅助与无POS辅助生成的倾斜模型精度无明显差距,两者精度都很高,有POS辅助模型地面检测点的平面和高程精度没有明显提升。由表3可知,针对房角检测点来说,有POS辅助生成的模型平面精度明显提高,提高了约三分之一,由分米级提升为厘米级。
4 结束语
本文通过两个测区的实验,分别研究了像控点数量、航高、POS辅助对城市精细化三维模型精度的影响。证明了像控点数量提高、航高降低都会提高倾斜模型的精度,有POS辅助生产的模型能够提高房角点的平面精度,也能提高模型局部精细化程度,但是对于精度较高的地面精度无明显影响。同时本文也验证了基于低空无人机的城市精细化建模方法的可行性,给城市精细化建模相关项目提供了参考。
