基于驾驶人跟驰特性的前撞预警指标与阈值确定方法*
2022-10-11龙文民鲁光泉谭海天
龙文民,鲁光泉,石 茜,谭海天
(北京航空航天大学交通科学与工程学院,北京102206)
前言
前向碰撞预警(forward collision warning,FCW)是为降低车辆追尾碰撞风险、提高车辆跟驰安全性而发展起来的一项高级辅助驾驶技术。其主要工作原理是基于传感器采集的车辆和道路信息,实时评估跟驰过程中自车的前向碰撞风险水平,并基于特定预警规则适时对驾驶人发出预警信息,以避免追尾事故发生。研究表明,车辆前向碰撞预警技术能帮助驾驶人更快速准确地应对潜在的紧急情况,有效降低跟驰过程中追尾碰撞事故的发生率及严重程度。
前向碰撞预警指标(forward collision warning indicator,FCWI)及其阈值的选取与确定是前向碰撞预警系统设计中的两个关键问题。若选取的FCWI无法准确实时表征驾驶人跟驰过程中对前向碰撞风险的感知水平,系统易出现误报漏报。而的大小则直接决定了前向碰撞预警时刻的合理性。如果预警过早,预警信息可能会被驾驶人忽略甚至引起分心或烦躁,降低使用舒适性。如果预警过迟,则不仅难以保障行车安全,更会降低驾驶人对前向碰撞预警系统的信任度。现有的前向碰撞预警方法一般通过实时判断车辆前向碰撞风险是否达到所选取FCWI的阈值来决定是否发出预警信息,其中则通常由自然驾驶数据统计分析或经验值确定。已有研究中常见的FCWI可分为安全距离类、安全时间类和风险量化类3种。安全距离类一般通过对比最小安全距离与实际车距以判断前向碰撞风险,FCW系统或主动避撞系统中常见的最小安全距离模型包括MAZDA模型、HONDA模型和Berkeley模型。此外,跟驰模型中典型的基于安全距离的模型包括Kometani模型、Gipps模型和FRESIM模型等。安全时间类一般可用来表征驾驶人应对当前潜在前向碰撞危险的剩余时间,主要包括距离碰撞时间(time to collision,TTC)、车头时 距(time headway,THW)和 时 间 裕 度(time margin,TM)。其中,TTC表示在碰撞轨迹与前后车速恒定的条件下,从当前时刻至碰撞发生时刻所需要的时间。TTC值越小,前向碰撞风险越高,常用预警阈值为2.5~4 s。在实际应用中,为避免TTC在两车速度较为接近时易产生极值的问题,常利用其倒数TTCi表征前向碰撞风险。THW表示同一车道相邻两辆车的车头驶过同一地点的时间差。THW值越小,跟驰过程中的前向碰撞风险越高,常用预警阈值为2~3 s。TM表示在前车制动时,后车通过减速以避免追尾碰撞所需的时间。TM值越小,跟驰过程中的前向碰撞风险越高,研究中以1.5 s作为预警阈值。风险量化类一般通过构建风险量化指标来估计前向碰撞风险,如预警系数、风险感知系数(risk perception,RP)和安全裕度(safety margin,SM)等。预警系数结合MAZDA模型与HONDA模型,由实际车距和临界制动距离与临界预警距离的比值关系决定。>1时,道路环境安全,无需预警;<1时,越小,前向碰撞风险越高。RP由1/与TTCi线性回归而成,用以同时表征驾驶人在跟驰过程中稳态和瞬态的主观风险水平,RP值越大,前向碰撞风险越高,研究中取RP为2作为驾驶人制动的阈值。安全裕度指标SM用以量化跟驰过程中驾驶人的风险感知水平,SM值越低,驾驶人感知到的主观风险水平越高,研究中职业驾驶人在平稳跟驰任务下的SM值约为0.862。
上述基于特定FCWI和固定阈值的前向碰撞预警方法,虽能在一定程度上提高行车安全性,但忽略了不同驾驶人对于前向碰撞风险反应和承受特征的异质性,易导致预警信息不符合驾驶人心理预期和预警功能接受度低等问题。因此近年来,学者们逐渐开始关注FCW功能对不同驾驶人的适应能力。金辉等利用k-means聚类方法对驾驶人风格进行分类,并基于长短时记忆模型设计个性化参数的预测模型,以改进FCW策略。Wang等基于驾驶人制动数据,利用灰度预测方法实现驾驶人风险感知阈值预测,并利用信息熵理论和决策树方法进行评价与更新,提高了驾驶辅助系统的接受度。Arbabzadeh等基于驾驶人特征、驾驶行为和周围驾驶条件,利用分层正则化回归模型来估计驾驶人反应时间,并以此计算FCW功能的临界距离。Wang等提出了一种基于TTCi与THW的双层FCW结构,并基于驾驶人制动数据在线辨识优化不同驾驶人的最佳阈值。此外,在FCW功能的效果评价上,研究中通常基于信号检测论对FCW功能的准确率、误报率和漏报率等进行评估。
虽然已有研究基于各种FCWI提出了相应的预警方法并进行了评价,但不同FCWI之间量纲不一,立足角度不同,风险表征能力也有差异,尚未建立完善的综合评价体系。此外,虽然驾驶人特征在FCW功能中的影响逐渐受到学者关注,但针对驾驶人反应时间的研究仍不够完善。根据刺激-反应理论,驾驶人对于跟驰状态变化的刺激,通常须经过感知-决策-动作的过程来实现车辆操纵。传统的前向碰撞预警系统往往只聚焦于驾驶人制动时刻的跟驰状态分析,忽略了跟驰过程中驾驶人反应时间的影响。实际上,在踩下制动踏板产生制动信号前,驾驶人已感知到了前向碰撞风险并做出了制动决策,因此制动时刻的FCWI并不能真实反映驾驶人的预警阈值。因此,系统地评价不同FCWI的预警表现对于预警指标的选取具有重要意义。而正确辨识驾驶人反应时间对于确定驾驶人个性化,决定合理的预警时刻则至关重要。
针对上述问题,文中首先基于信号检测论与秩和比法提出了FCWI的综合评价方法;在此基础上提出了个性化前向碰撞预警方法,实现了驾驶人跟驰反应时间特征参数和的在线辨识与更新;最后基于实车自然驾驶数据分析比较各FCWI,选取最优指标并确定其个性化阈值。
1 前向碰撞预警指标评价方法
1.1 常用前向碰撞预警指标
跟驰场景中驾驶人制动行为反应过程示意图如图1所示,其中-1表示前车,表示后车。假设时刻两车处于安全跟驰状态,此时后车的前向碰撞风险为。由于两车跟驰状态变化(如前车减速),在时刻驾驶人感知到的前向碰撞风险超过了其风险承受阈值,因此作出制动决策。在经过的反应时间后,在时刻车辆制动踏板被踩下并发出制动信号,此时后车的前向碰撞风险为。

图1 跟驰场景中制动反应示意图
已有文献中针对跟驰场景常用的FCWI及其数学定义如表1所示,其中v和v分别表示前后两车的速度;a与a分别表示前后两车的加速度;D表示两车的纵向间距;l表示前车车长。
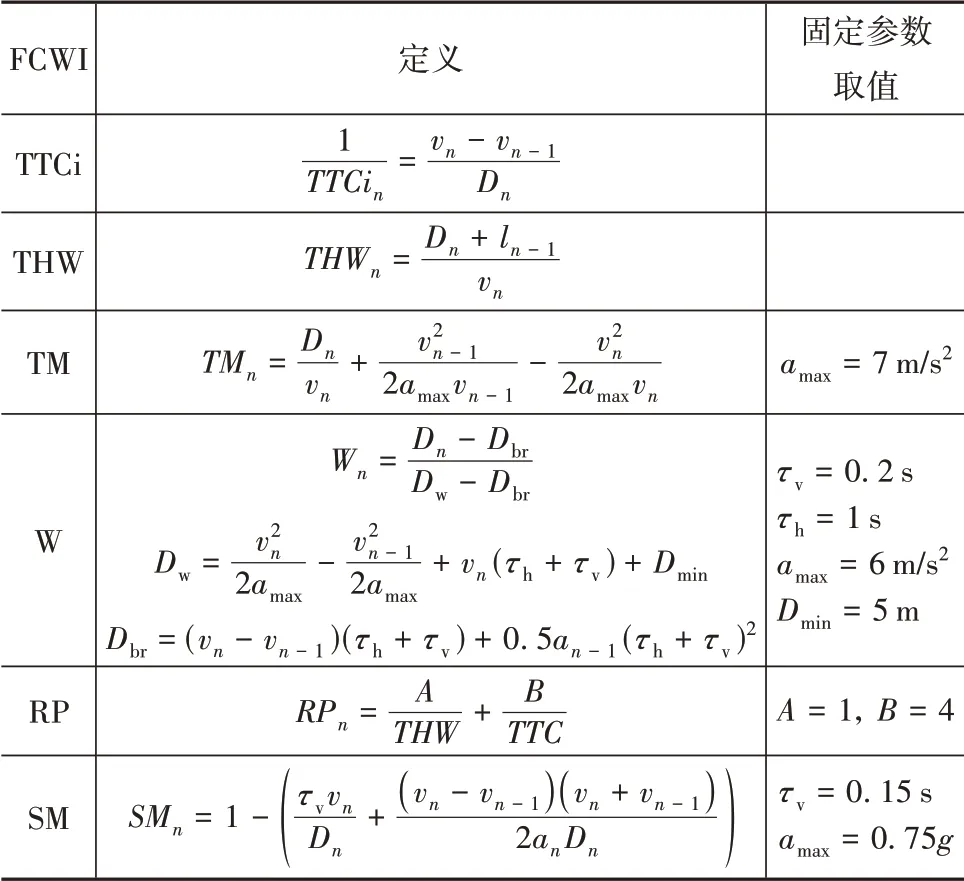
表1 已有文献中常用FCWI
1.2 前向碰撞预警指标综合评价方法
为有效评价上述前向碰撞预警指标,基于信号检测论,采用秩和比综合评价法构建了FCWI的综合评价方法。在跟驰过程中,当驾驶人感受到前向碰撞风险较高时,一般会采取制动措施以避免追尾碰撞事故发生。而FCW系统须基于车辆当前的跟驰状态结合判断是否须发出预警信息。类比信号检测问题,车辆FCW功能的判别矩阵如表2所示。其中当系统预警且驾驶人制动时,称为正确预警;当系统预警但驾驶人不制动时,称为误报;当系统不预警而驾驶人制动时,称为漏报;当系统不预警且驾驶人不制动时,称为正确拒绝。

表2 FCW功能的判别矩阵
在判别矩阵的基础上,引入准确率(A)、击中率(H)、误报率(FA)、辨别力指数'、似然比和预警阈值标准差系数V对各FCWI的FCW功能进行评价,其计算公式分别为
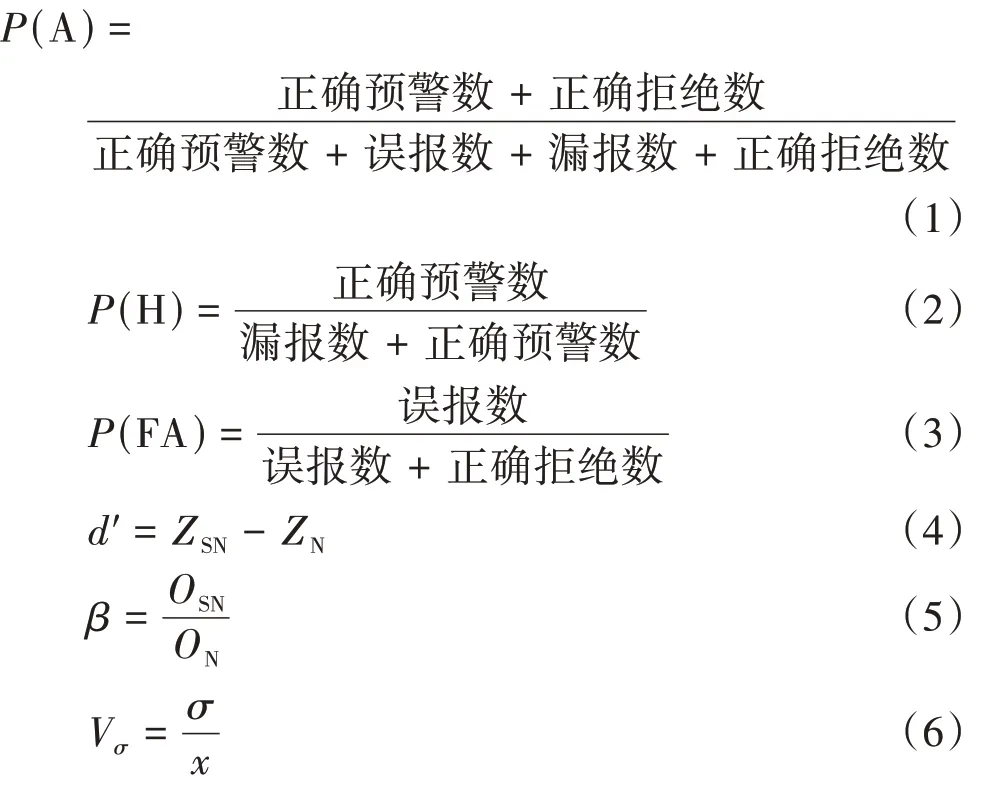
式中:、与、分别表示基于PZO转换表得到的击中率(H)与误报率(FA)在标准正态概率密度曲线上对应的横纵坐标值;为标准差;为均值。辨别力指数'可以衡量不同指标对“制动”、“不制动”两种状态的区分能力,其值越高,分辨力越强;似然比能用于判断该指标对应的预警阈值是否过于宽松或过于严苛,其值越接近1,指标越优;越大于1,指标越严格;越小于1,指标越宽松。预警阈值标准差系数可用于分析不同量纲数据的离散程度,其值越小,说明样本中的预警阈值越集中。
在确定上述FCWI的评价指标基础上,采用秩和比(rank-sum ratio,RSR)法对各指标进行综合定量评估。RSR法作为一种指标综合评价的统计分析方法,具有适用范围广、操作简单、能消除异常值等优点,一般可分为传统秩和比法(整秩次秩和比法)与非整秩次秩和比法两种,主要区别在于编秩方法的差异。其中传统秩和比法根据待评价对象在评价指标上的表现,从优到劣依次编秩为,-1,...,2,1,其中为评价对象数量。非整秩次秩和比法在编秩时,将最优指标值编为,最差指标值编为1,其余指标值编为从1~的线性递增的非整秩次。虽然传统RSR法通过将原始数据进行编秩得到无量纲统计量RSR值,可对评价对象的优劣程度进行直接或分档排序,但其在编秩过程中易丢失原始数据的定量信息,如原始数据的大小差别等。非整秩次秩和比法虽然在一定程度上减少了信息损失,但对于离群值的处理仍不够理想。
因此,为使编秩大小能更好地代表评价指标值的实际差距,提出比例RSR法,根据当前指标值与最优指标值的比值编秩,具体步骤如下。
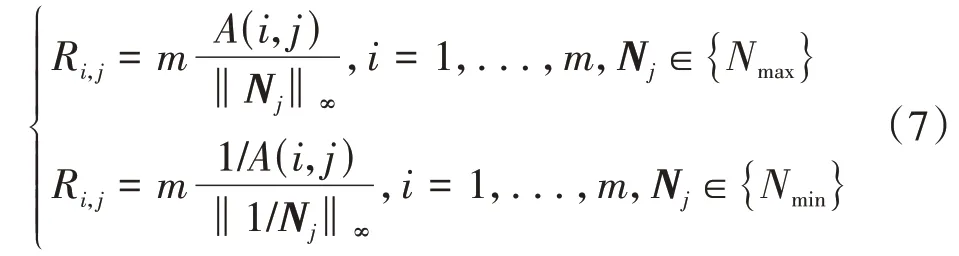
(1)将个待评价对象的个评价指标排成行列的原始数据表A=(,,...,N),其中N表示第个评价指标的列向量,∈1,...,。评价指标可分为低优指标{}、高优指标{}两类,其中低优表示该指标值越小越优,高优则表示该指标值越大越优。数据表A对应秩表R的计算公式为
(2)计算每个待评价对象的秩和比RSR:

(3)根据秩和比RSR的大小评价指标的优劣。RSR值越接近1,待评价对象越优,RSR值越接近0,待评价对象越劣。
2 个性化前向碰撞预警方法
由图1可知,在获得车辆制动信号的基础上,若能够准确辨识驾驶人反应时间,便能从历史数据中得到驾驶人前向碰撞风险感知时刻的,从而得出该时刻驾驶人的预警阈值。因此,个性化前向碰撞预警方法的重点在于不同驾驶人反应时间及预警阈值的在线辨识与更新。方法流程如图2所示。首先感知融合车辆信息,判断当前车辆是否处于跟驰情况。随后判断当前状态是否达到前向碰撞预警指标阈值来决定是否对驾驶人进行预警。驾驶人反应时间和的在线辨识与更新则基于驾驶人跟驰行为数据的分析实现。

图2 个性化前向碰撞预警方法流程图
2.1 反应时间在线辨识与更新
作为驾驶人的固有特征之一,不同驾驶人的反应时间往往存在较大差异。而对于同一驾驶人,其反应时间随交通环境和驾驶任务的不同也表现出一定的差异性和随机性。此外,在缺乏特定设备支持的情况下,一般难以直接精确测量驾驶人的反应时间。上述特点使反应时间的准确估计变得十分困难。然而,驾驶人的跟驰表现实际上包含了其反应时间信息,这意味着可以尝试通过分析跟驰数据间接估计反应时间。
根据Newell低阶跟驰模型,跟驰过程中后车的时空轨迹基本上与前车相同,仅在空间和时间上存在平移。其模型描述为

式中d和分别表示空间位移和时间位移。上式微分可得

从式(10)可以看出,表示后车达到与前车相同速度时的滞后时间。考虑到数据采集的离散性,应松弛相同速度的约束条件。因此,可由下式获得:

式中表示判定车辆速度相同时两车之间速度差的最大阈值,设置为0.1 m/s。
可进一步表示为时刻驾驶人的瞬时反应时间与车辆动作时间之和,即=+,其中即所求的目标参数。后车在行驶过程中的速度和位置变化为

假设后车的加速度在[,+]期间保持a()不变,在[+,+]期间保持a(+)=a(+)不变。那么式(12)和式(13)可简化为

合并上述两式可得
上式可写为
最终可通过求解式(17)得到。另外,为保证结果的有效性,须对与的数值范围作出约束。相关研究中驾驶人对后制动灯、预料冲突和意外冲突的反应时间分别在[0.1 s,3 s]、[0.4 s,1.3 s]和[0.8 s,1.8 s]的范围内。Ahn等基于实际跟驰数据分析认为,Newell模型中的时间滞后不超过3 s。因此,与的约束范围分别取[0.1 s,3 s]和[0.1 s,1.8 s]。
在每个时间步对进行求解和筛选后,采用的统计均值作为后车驾驶人平均反应时间的最终辨识结果:

式中N表示跟驰过程中求解出的有效的数量。
2.2 预警阈值在线辨识与更新
假设车辆在时刻制动踏板被踩下产生制动信号,此时前向碰撞预警指标值=()。考虑驾驶人反应时间,因此驾驶人感知前向碰撞风险并作出制动决策时刻应为-,此时前向碰撞预警指标值为=(-)。对于驾驶人风险感知时刻的前向碰撞预警指标数据序列为

驾驶人前向碰撞预警指标阈值为

式中表示跟驰过程中求解出的有效()的数量。
3 预警指标的选取与阈值的确定
3.1 自然驾驶数据采集与处理
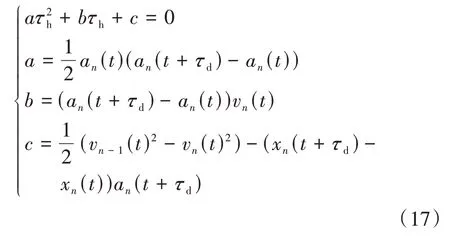
为验证该方法的有效性,于2019年4月组织实施了5次不同驾驶人的自然驾驶实验,如图3所示。两辆实验车辆均配备了车辆感知与车车通信设备,能以20 Hz的频率获取车辆位置、速度、加速度、航向角和CAN信号等数据,并进行实时交互。驾驶路线位于北京市昌平区,主要为城市次干路,总长约16.5 km,含若干交叉口和匝道,实验过程中无交通拥堵状况。在测试过程中,前车驾驶人保持不变,5位被试者分别驾驶后车自然跟随前车并沿着测试路线行驶两圈。此外,每辆车均配备一名测试助理,负责路线引导和实验记录。
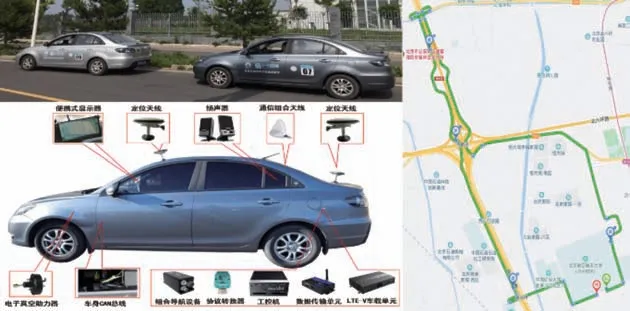
图3 实验车辆及测试路线示意图
由于前向碰撞预警功能主要针对跟驰工况,因此对于上述自然驾驶实验采集的原始数据,首先要从中筛选出直道跟驰场景。为实现跟驰场景辨识,引入如下约束。
(1)车速约束。为排除车辆停车和怠速情况下数据的影响,设定前后车速约束:

(2)THW约束。为保证车辆处于跟驰状态,设定THW约束:

(3)车道约束。为保证前后两车在同一车道内,设定两车横向距离约束:

式中S()表示前后两车的横向间距;w表示后车车宽。
(4)航向角约束。为保证前后两车均在直道跟驰,设定两车航向角约束:

式中HAD表示前后两车航向角之差。
(5)转向约束。跟驰状态下左右转向灯应处于关闭状态。
数据处理结果如表3所示。每位驾驶人自然驾驶数据时长约50 min,含大概60 000条数据记录。5位驾驶人共筛选出335个跟驰案例,案例平均时长26 s。此外,为保证数据的平滑,引入卡尔曼滤波器对每个跟驰案例数据进行滤波处理。

表3 自然驾驶实验基本信息
3.2 反应时间辨识
以1号驾驶人第33号跟驰案例(以下称为案例A)为例。如图4所示,案例A中前后两车速度在8~16 m·s内波动,后车速度比前车具有明显的跟随性与滞后性,案例代表性较强。案例A中根据式(11)和式(17)计算的和结果分布如图5(a)和图5(b)所示,其平均值、方差和中位数分别为1.46、0.55、1.55,0.71、0.21、0.57。文 献[28]中 基 于Newell跟驰模型利用极大似然估计法对交叉口跟驰车流的估计结果为1.47 s(平均车速3.6 m·s)和1.55 s(平均车速5.4 m·s),与案例A中的估计值一致。

图4 案例A概述

图5 案例A反应时间辨识结果
不同驾驶人所有跟驰案例的反应时间辨识结果如图6所示。其中图6(a)表示1号驾驶人反应时间辨识结果的迭代过程。可以看出随着跟驰数据量的增加,反应时间辨识曲线趋于稳定,有较好的鲁棒性。5位驾驶人所有跟驰案例的反应时间辨识结果的盒型图如图6(b)所示,其中2号驾驶人分布最为紧凑,离群值最少。5位驾驶人反应时间的最终辨识结果分别为0.74,0.74,0.77,0.75和0.83 s。
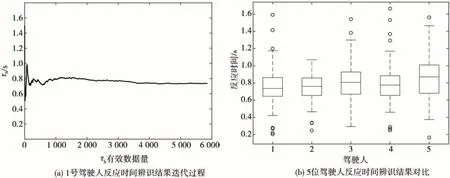
图6 不同驾驶人反应时间辨识结果
3.3 前向碰撞预警指标阈值辨识
在反应时间辨识的基础上,对驾驶人前向碰撞风险感知时刻的进行计算。以案例A为例,首先依据制动信号从其中筛选出制动案例,其中制动信号为0表示制动踏板未踩下,信号为1则表示制动踏板被踩下。图7所示为案例A中各FCWI值与制动信号的对比关系。从图中可以看出,案例A含有5段制动行为,THW、TM、W、SM这4个指标值的变化趋势较为一致,TTCi与RP的指标值变化趋势类似。由3.2节可知,1号驾驶人反应时间的最终迭代结果为0.74 s,因此从每个制动时刻往前推0.74 s定为1号驾驶人前向碰撞风险感知时刻。故考虑1号驾驶人反应时间,提取案例A中5次制动行为对应的,结果如图8所示。

图7 案例A中各FCWI与制动信号对比图

图8 案例A中FCWIp提取结果
进一步结合各驾驶人反应时间辨识,对5位驾驶人的所有跟驰案例进行筛选分析,结果如表4所示。由表可知,不同驾驶人的制动案例数差别较大,平均为49个;不同驾驶人反应时间差异不大。5位驾驶人各FCWI的预警阈值均值为[TTCi,THW,TM,W,RP,SM]=[0.049,1.601,2.151,0.645,0.879,0.774],其中除TTCi外,其余指标阈值均符合已有研究中的经验值。TTCi的阈值与经验值存在较大偏差的原因可能是由于跟驰过程中,当前后车速度差较小时,TTCi易出现极值甚至负值。

表4 所有驾驶人各FCWI阈值辨识结果
3.4 前向碰撞预警指标选择
基于上述不同驾驶人反应时间和不同FCWI预警阈值的辨识结果,结合车辆制动信号,依据表2的判别矩阵对驾驶人的制动案例进行分类。驾驶人在跟驰过程中制动时刻的车辆状态可视为“需要制动”的危险跟驰状态,而制动前时刻的跟车状态可视为“不需要制动”的安全跟驰状态,两者应满足-≥,本文取-=2 s。因此,对于所有制动案例,分别提取后车制动时刻和后车制动时刻前2 s时两车的FCWI值,5位驾驶人共有246组数据,并依据表2将其分为正确预警、误报、漏报和正确拒绝4类。
以1号驾驶人为例,不同FCWI下FCW功能的准确率、击中率、误报率对比如图9(a)所示。由图可见,在准确率和击中率上,几个指标表现差距不大。在误报率上,TTCi最低、RP与SM次之,且都显著优于THW、TM和W。1号驾驶人不同FCWI下对应的预警阈值标准差系数、辨别力指数和似然比对比结果如图9(b)所示。在标准差系数上,TM与SM两者接近,且显著优于其他指标,TTCi最差,说明TM与SM的样本阈值分布较为集中,TTCi的样本阈值分布最为离散。在辨别力指数上,TTCi最高,且显著优于其他指标,THW最差。在似然比上,THW、TM、W三者相近且都接近1,TTCi最大,说明其标准最严格。
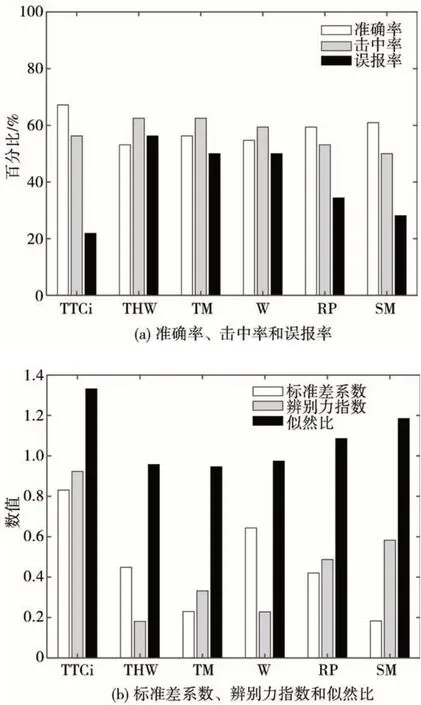
图9 1号驾驶人各FCWI表现对比
进一步地,所有驾驶人不同FCWI的具体评价结果如表5所示。从所有驾驶人均值结果来看,在标准差系数上,SM结果最优,TTCi的结果最差且显著大于其他指标。在准确率和击中率上,几个指标没有显著差别;在误报率上,TTCi、RP与SM接近,且优于其他指标。在辨别力指数上,TTCi最优,SM与RP次之,且都显著优于THW、TM与W。在似然比上,THW、TM、W接近且优于其他指标,TTCi最为严格。
对于表5中5位驾驶人的均值结果,分别利用传统秩和比法、非整秩次秩和比法以及比例秩和比法对各FCWI进行综合评价。由于辨别力指数、似然比由击中率、误报率推导而来,为避免重复计算,仅考虑标准差系数、准确率、击中率、误报率4个评价指 标。因 此=6,=4,{}={V、(FA)},{}={(A)、(H)}。3种RSR法的综合评价结果如表6所示,各FCWI的评价排序对比如表7所示。

表5 所有驾驶人不同FCWI评价结果
由表6和表7可知,传统秩和比法中,评价得出的最优指标为TTCi与SM,其RSR值均为0.71,其余指标RSR值从大到小依次为RP、THW、W与TM。非整秩次秩和比法中,评价得出的最优指标为SM,其RSR值为0.743,其余指标RSR值从大到小依次为RP、TTCi、W、THW、TM。可以看出,非整秩次秩和比法中TTCi,THW、TM、SM这4个指标的RSR值与传统秩和比法接近,W与RP的RSR值明显大于传统秩和比法,这是由于W与RP虽然有些指标排序靠后,但其与最优值的差距并不大,而非整秩次的编秩方法为其保留了一定的原始数据差异信息。比例秩和比方法中,评价得出的最优结果为SM,其RSR值为0.968,其余指标RSR值从大到小依次为TM、RP、TTCi、THW、W。3种RSR法综合来看,SM始终占据着最优指标的位置;RP排序稳定在第2/3位;THW排序稳定在第4/5位;TTCi与W排序浮动较大,但始终满足TTCi>THW>W;TM的波动最大,在传统秩和比与非整秩次秩和比法中均排末位,但在比例秩和比法中排序第2,原因在于TM虽然在准确率、击中率和误报率上相对其他指标排名不高,但是其中差距被TM标准差系数的优秀表现弥补了。此外,比例秩和比法中,TM与RP虽然分列第2、3位,但其RSR值十分接近。

表6 3种RSR法评价各FCWI结果对比

表7 3种RSR法评价FCWI排序对比
综上所述,通过3种不同RSR法对比,在TTCi、THW、TM、W、RP、SM 6种指标中,安全裕度SM的综合评价结果最优。因此选择SM作为驾驶人前向碰撞预警指标,其初始参考预警阈值可设为0.77。基于SM的个性化前向碰撞预警方法,在辨识驾驶人反应时间的基础上,得到驾驶人制动前风险感知时刻指标值,并通过统计分析实现前向碰撞预警阈值的在线辨识与更新。FCW功能将根据当前车辆跟驰状态和预警阈值判断是否对驾驶人进行前向碰撞预警。
4 结论
(1)提出了一种基于信号检测论和秩和比法的驾驶人跟车过程中前向碰撞预警指标的评价方法,研究结果表明该方法可有效从不同层面对不同预警指标进行综合评价。
(2)提出了一种基于驾驶人跟驰特性的个性化前向碰撞预警方法,实现了对驾驶人反应时间和前向碰撞预警阈值的在线辨识与更新,自然驾驶数据分析表明该方法可对不同驾驶人跟驰过程中的反应时间和预警阈值进行差异化辨识。
(3)自然驾驶数据分析表明,在TTCi、THW、TM、W、RP、SM 6种指标中,从标准差系数、准确率、击中率和误报率4个维度,综合评价结果最优指标为SM,其初始参考预警阈值可设为0.77。