不平衡电网条件下APF的微分平坦控制策略
2022-10-10赵若辰梅柏杉张津玮付文波
赵若辰,梅柏杉,张津玮,付文波
(1.上海电力大学电气工程学院,上海 200090;2.国网浙江嘉善县供电有限公司调控中心,浙江嘉兴 314100)
近年,半导体技术高速发展、非线性工业用户迅速增多,这对电网的谐波治理和电能质量造成了前所未有的挑战,众多专家学者对电能质量,尤其是谐波治理方面的研究越来越重视[1]。目前,谐波治理主要从减少谐波的产生和谐波产生后的补偿两方面进行着手,后者称为被动型谐波治理,在谐波被动型治理措施中,由于传统无源电力滤波器(passive power filters,PPF)在电网状态改变引起谐波变化时,有可能无法将谐波降低到国标要求的范围以内。有源电力滤波器[2-3]以灵活性高、补偿精准、能够自适应动态实时跟踪补偿谐波而成为目前谐波治理的一个重要措施[4-6],但我国在APF的谐波补偿控制技术和控制的可靠性上与国外还存在明显的差距。
目前针对APF控制技术的研究层出不穷[7-8],针对实际应用的APF,控制技术较多采用传统PI控制。PI控制稳定性好,但是精度不够高;文献[9]应用两种控制方案的技术叠加,虽在一定程度上对较单独使用PI或重复控制较好,但是增加了控制系统的复杂性。文献[10]同样采用该两种控制方法叠加的方法,但只对单相APF的应用进行了分析。文献[11]在原始控制策略的基础上进行改进,补偿效果虽有一定的提高,但是未能脱离原有控制策略的局限性,改进程度不高。文献[12]采用线性化的思想,将非线性元件APF的数学模型通过线性化的处理进行控制,在线性化过程中丢失精度,影响了最终补偿效果;文献[13]采用滑模控制进行谐波的补偿,但是滑模控制存在高频抖动的问题,采用滑模的前提是要对抖动问题另外添加控制,增加了系统的复杂性和设计的难度。文献[14-17]将微分平坦应用在高压直流输电系统中、变换器和模块化多电平变流器中,都验证了该控制策略的可行性和有效性。目前,针对APF,兼顾电网不平衡运行条件的基于微分平坦的控制技术尚未得到关注。
为解决上述传统控制精度不够的缺点、解决多种控制方法叠加带来的复杂性增加的问题、解决其他控制策略带来的抖动等问题,本文设计了基于不平衡电网条件下APF的微分平坦控制(differential flatness based control,DFBC)策略,首次将微分平坦控制策略引入APF的控制与谐波治理中,同时,文中针对更贴近于电网实际情况的不平衡状态为前提,进行系统和控制策略的设计,使所设计的系统更具有实际应用价值和技术参考价值。该控制策略是从结构特征角度出发进行控制的一种方案,能够准确地体现系统的特征,通过期望输出,在状态空间中设计变量的参考轨迹,同时为了更加精准地进行补偿操作,通过平坦输出量和期望输出量做差,形成输出偏差值。将该值与参考运动轨迹输出值叠加,起到控制与偏差矫正的作用,从而更大限度地增加控制精度。文中以微分平坦控制为理论基础,首先验证了APF的微分平坦性,并设计出了适用于电网各种运行状态的正、负序控制器,通过在Matlab平台进行仿真验证,证明了DFBC对APF系统的有效性,同时通过在各种不平衡状态下进行与传统PID作用下的仿真波形对比,验证了本文所设计控制器的优越性。
1 有源电力滤波器数学模型
本文APF的拓扑结构如图1所示,设定三相电源所带负载为非线性的,且三相滤波参数L,R相等,三相逆变器开关相同且开关损耗忽略不计,无谐波补偿时负载谐波全部由电源提供,同时通过APF向网络注入负的谐波电流。
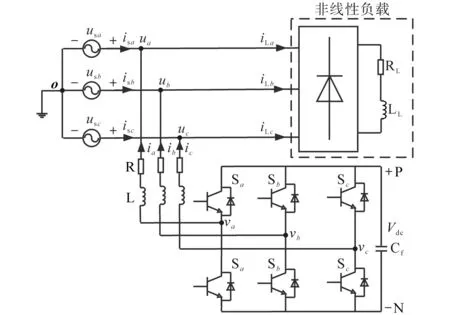
图1 APF系统拓扑结构Fig.1 The topology of APF system
图1中,usj(下标j=a,b,c)为三相电源的相电压;uj为PCC处的电压;vj为APF交流侧输出电压;Vdc为直流侧电容Cf两端电压;isj为三相电源的输出电流;iLj为三相负荷电流;ij为三相APF补偿电流,正方向规定为APF流向网络。
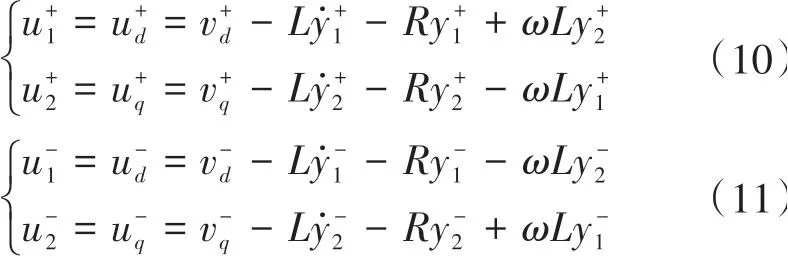
由图1的拓扑结构和KVL定理可得:

由于在三相三线制系统中,电网不平衡状态下只有正序和负序两种分量,现通过正、负序分离和坐标变换,可得式(1)在d-q坐标系下表达式为

2 微分平坦控制策略
微分平坦理论是非线性系统从结构特征角度出发进行控制的一种方案,根据输入、输出状态量之间的某种特殊关系,巧妙的构成反馈,从而对输出量进行精准的控制。具体为:如果针对特定的非线性网络,可以设定出这样一组输出变量y,能够使此系统的所有状态变量和输入变量由这组y及y的κ阶导数表示,其中κ为正整数。那么就证明称该系统具有微分平坦性,该系统便可称为微分平坦系统,同时,y称为平坦输出。可见,输出变量的选取不唯一,只要能够找到满足上述微分平坦性的输出量,便可设计出不同的控制器。
假设非线性系统可表示为ẋ=f(x,u),其中x∈Rn为n维状态变量;u∈Rm为m维输入;变量上方的“·”“··”分别为变量的1阶、2阶求导。
如果能找到m维输出y∈Rm使状态变量和输出满足:

式中:φ,ϕ分别为相应的关系函数。
同时,χ,κ为正整数,输出y的各阶导数独立,那么上述分析成立。
图2为微分平坦控制示意图。
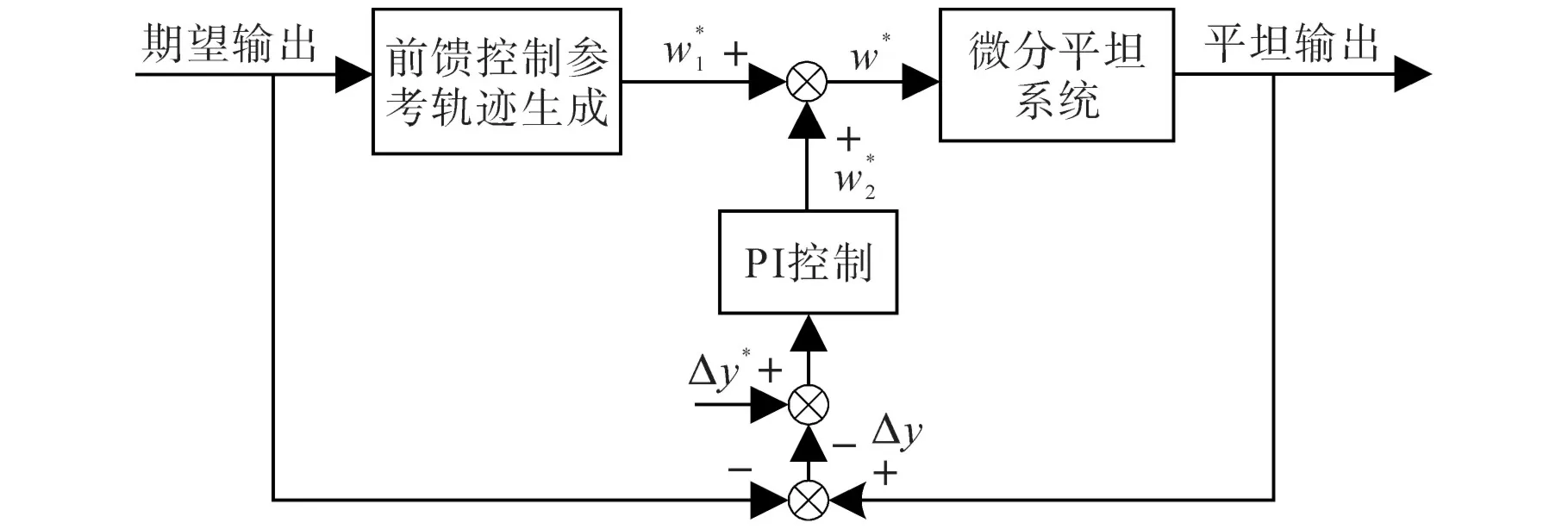
图2 微分平坦理论控制示意图Fig.2 Schematic of differential flat control
由图2可知,微分平坦控制整个控制过程分为两部分:第一部分为期望前馈控制参考轨迹生成部分,第二部分为误差反馈部分。期望前馈控制参考轨迹生成部分,通过期望输出,在状态空间中设计变量的参考轨迹,同时为了更加精准的补偿,通过平坦输出量和期望输出量做差,得到Δy,同时将Δy与差值参考值Δy*进行对比,形成输出偏差值,通常Δy*取为理想值0。将该值与参考运动轨迹输出值叠加,起到控制与偏差矫正的作用,从而更大限度地增加控制精度。
3 APF的平坦性
系统的正、负序状态变量取为

输入变量取为

输出变量取为

则有状态变量与输出变量满足:

同时,输入变量可表示为
由此可知,x和u都可以由y或y的导数表示,满足微分平坦策略的平坦性要求,从而证明了正、负序分离策略下两系统的微分平坦特性。
4 基于微分平坦性理论的控制器的设计
由微分平坦理论构成的控制器主要分为两部分,一部分是由期望输出变量作为输入量,通过在状态空间进行设计,从而输出前馈参考量;另一部分是用来对控制过程量进行误差矫正的误差反馈补偿环节。本文以微分平坦理论为基础,以正序分量控制器设计为例进行,负序与之原理相同。
4.1 内环控制器的设计
设定系统的期望输出量为

由式(2)与式(12)可得期望前馈参考量:

令状态变量的误差为Δid,Δiq,从而可得误差表达式为

k2,k3,k4为误差反馈环节的控制器系数。
由此,可得内环的总输出参考值为

4.2 外环控制器的设计
由d-q坐标系下功率计算方程可得:
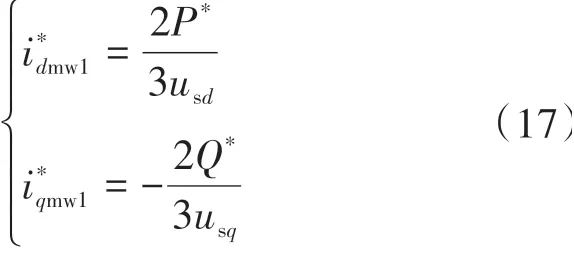
将功率误差值表示为ΔP,ΔQ,则PI控制下的数学模型可表示为

值;k5,k6,k7,k8为误差反馈环节的控制器系数。
由此,可得外环的总输出参考值为

4.3 APF微分平坦控制整体原理图
图3为电网不平衡运行条件下APF微分平坦控制原理框图。本控制系统首先通过谐波检测和电源端电压电流的提取,获得后续控制需要的参量;然后进行坐标变换和正负序分离,通过与直流侧电容电压控制输出量结合,得到所需的参考量;接着通过本文设计的基于微分平坦理论的外环控制与内环控制器,进行谐波补偿量的精准控制;最后通过SVPWM谐波调制,使APF产生系统实时所需的谐波量,从而保持系统电流THD在规定标准范围以内。

图3 电网不平衡条件下DFBC原理框图Fig.3 Schematic of DFBC under unbalanced grid state
5 仿真、实验验证
为了验证所设计的控制系统,在Matlab/Simulink平台进行仿真实验,针对电网平衡与不平衡状态进行仿真实验验证,系统参数为:电源侧电压为50 Hz工频下有效值220 V,负载阻抗5+0.02j Ω,APF直流侧电容C=5 mF,直流侧电压期望值800 V,APF交流侧线路阻抗为0.3+0.005j Ω。
5.1 电网平衡状态下的仿真
针对电网平衡状态进行仿真验证,系统各参数均为上述稳定量,由仿真实验波形图4~图7可以看出,补偿前电网输出电流即为负载侧电流,此时电流波形发生严重畸变,谐波含量较大,经傅里叶分析,此时负载电流三相对称,各相的总谐波畸变率(total harmonic distortion,THD)为26.4%,不能满足电能质量的要求。投入APF后,电网谐波得到很大改善。当采用传统PI控制进行APF谐波跟踪补偿时,电网三相电流THD降低为3.85%,当采用微分平坦控制(DFBC)时,谐波含量降低为2.45%。对比之下,说明文中所设计的基于微分平坦理论的APF控制器具有更精准的补偿能力。

图4 负载电流波形Fig.4 Load current waveforms
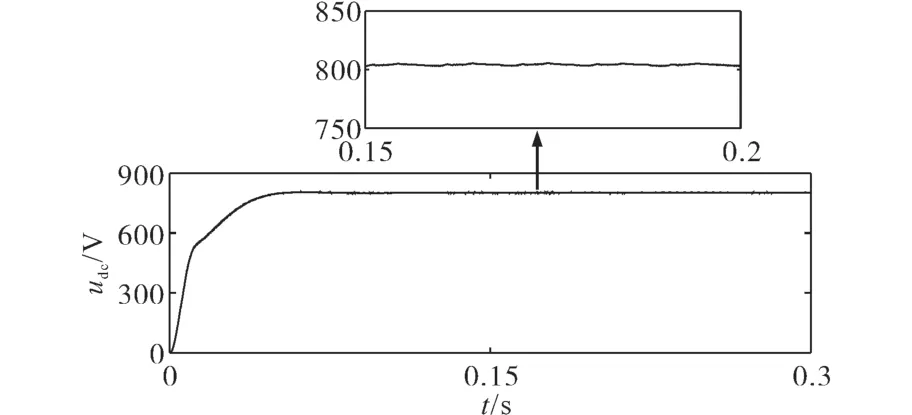
图7 DFBC时直流侧电压波形Fig.7 DC side voltage waveform under DFBC

图5 PI控制补偿后电源电流波形Fig.5 Current waveforms of power supply under PI control
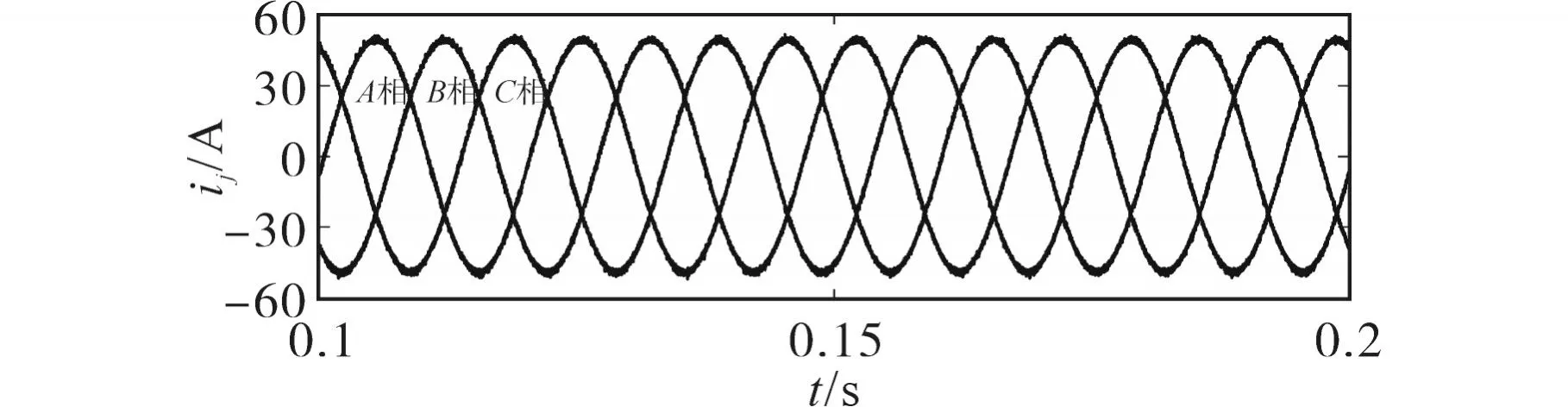
图6 DFBC补偿后电源电流波形Fig.6 Current waveforms of power supply under DFBC
5.2 电网不平衡状态下的仿真
电网电压降低是电网实际运行的常见情况,本文针对电网单相电压跌落和两相电压跌落进行仿真分析,验证本文所设计控制器在电网不平衡状态下的谐波补偿能力。
5.2.1 单相电压不平衡
电网的单相电压不平衡主要指单相电压跌落的情况。该仿真将电网电压B相电压设置为有效值198 V,其余两相为220 V。通过仿真结果图8~图10波形可以看出,此时若没有APF进行谐波补偿,电网电流不仅含有大量谐波,同时三相电流处于不对称状态,B相电流明显低于其他两相。APF投入补偿后,同样在PI和微分平坦控制下进行波形的对比。在PI控制时,三相电网电流谐波降低为3.95%,3.73%,3.80%,在微分平坦控制下,三相电网电流谐波可降低为2.96%,2.83%,2.72%,证明本文所提微分平坦控制在电网不平衡状态下的优越性。
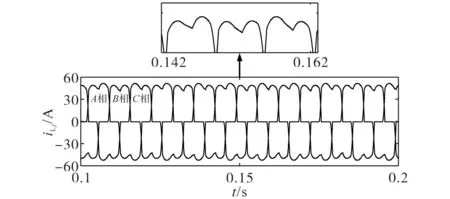
图8 单相电压不平衡时负载电流波形Fig.8 Load current waveforms when single phase voltage unbalanced
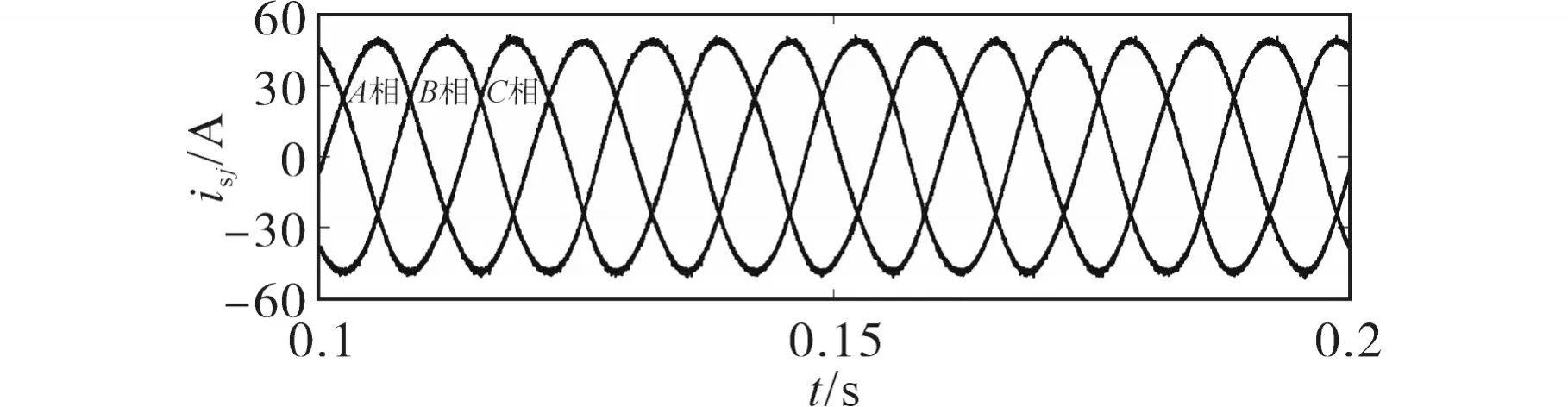
图9 单相电压不平衡时PI控制下电源电流波形Fig.9 Current waveforms of power supply under PI control when single phase voltage unbalanced

图10 单相电压不平衡时微分平坦控制下电源电流波形Fig.10 Current waveforms of power supply under DFBC when single phase voltage unbalanced
5.2.2 两相电压压不平衡时
两相电压不平衡运行状态下的参数设置为:B相电压209 V,C相电压198 V,其余参数不变。由图11~图13可以看出,两相电压不平衡时,电网电流也出现不平衡,B相与C相电流降低,三相谐波电流含量都较高,三相谐波分别为26.7%,27.3%,27.4%。投入APF进行谐波补偿后,不仅电网电流谐波得到了改善,三相电流也从不对称补偿至对称状态。PI控制时电网电流谐波补偿至3.89%,4.52%,4.07%,微分平坦控制时电网电流谐波补偿至2.67%,2.92%,2.69%。

图11 两相电压不平衡时负载电流波形Fig.11 Load current waveforms when two phase voltages unbalanced

图13 两相电压不平衡时微分平坦控制下电源电流波形Fig.13 Current waveforms of power supply under DFBC when two phase voltages unbalanced

图12 两相电压不平衡时PI控制下电源电流波形Fig.12 Current waveforms of power supply under PI control when two phase voltages unbalanced
综上,两种电网不平衡状态下,均验证了本文所提正、负序分离的微分平坦控制的精准的谐波补偿能力。
5.3 实验验证
本课题以50 Hz市电为交流电源,以型号为TMS320F28335的DSP控制器为控制核心,直流侧电容为Cf=2 mF,输出滤波电感Lf=3 mH。实验验证本文设计的控制器的可行性,如图14所示。

图14 部分实验照片Fig.14 Part of the experiental photos
图15为电网平衡状态下的实验结果图,图中分别显示的是A相补偿前电流波形、B相补偿前电流波形、A相补偿后电流波形、B相补偿后电流波形。图16、图17为DFBC和PI控制下B相电压跌落状态下的实验波形,该实验中将电网电压B相电压有效值设置为198 V,其余两相为220 V,与仿真时参数相同。图18、图19所示为DFBC和PI控制下B,C相电压跌落时的波形图,B相电压有效值209 V,C相电压有效值198 V,其余参数不变。从波形可以看出,在各种情况下,通过本课题所设计的控制器进行补偿后,电源电流都能达到较好的补偿效果,相较于PI控制,波形得到更好的改善,电网电流谐波明显减少。

图15 微分平坦控制下平衡状态时的实验波形Fig.15 The test waveforms at equilibrium state under DFBC

图16 微分平坦控制下B相电压跌落时实验波形Fig.16 The test waveforms when B-phase voltage sag under DFBC

图17 PI控制下B相电压跌落时实验波形Fig.17 The test waveforms when B-phase voltage sag under PI control

图18 微分平坦控制下B,C相电压跌落时实验波形Fig.18 The test waveforms when B,C-phase voltage sag under DFBC

图19 PI控制下B,C相电压跌落时实验波形Fig.19 The test waveforms when B,C-phase voltage sag under PI control
6 结论
本文针对电网不平衡状态下APF的控制系统进行设计,采用基于微分平坦的控制理论对电网两种不平衡状态进行了仿真实验验证,结论如下:
1)本文所设计的基于微分平坦理论的控制器,通过与传统PI控制时进行对比,较之具有更好的谐波补偿能力、更快的响应速度,能进一步降低电网谐波含量,提高电网电能质量。
2)本文所设计的控制策略,具有不限于本文所列举的两种电网不平衡状态的谐波补偿能力,针对电网负载不平衡、线路参数不平衡等状态,具有同样的效力。
