水库水位在线高精度测量方法研究
2022-10-09章鲁琪徐国平濮东杰
耿 芳,章鲁琪,王 冲,徐国平,濮东杰
(1.浙江水文新技术开发经营公司,浙江 杭州 310009;2.浙江禹控科技有限公司,浙江 杭州 310009)
水库水位的精确测量对于汛期防控以及抗旱用水调度决策至关重要,大中型水库水位高达100~200 m,传统测量系统的测量精度在1%~1‰,按150 m最高水库水位计算,测量最大误差达到1.50~0.15 m ;同时,水库波浪导致测量系统本身产生随机误差,进一步增大测量系统的误差,因此传统测量精度显然无法满足水库水位的精准测量[1]。另一方面,基于水压传感器的水位测量是目前水库中主要采用的在线测量方法,根据压力传感器的工作特点,长期受压的水压传感器,其测量膜片存在塑性变形的风险,导致传感器的零点漂移及传感器损毁,严重影响水库水位测量准确性,特别是干扰汛期的有效防汛决策。为此,开发高精度水库水位测量系统具有重要的现实意义及工程应用价值。
1 水位测量系统的构建
基于水压传感器的水位测量系统包括高精度水压传感器(UNIK5000)[2-4]、模拟通道、滤波电路、A/D及处理器组成。由于传感器为4~20 mA电流输出,其模拟通道包括取样电阴、电压跟随、分压电路和滤波电路;考虑到高精度测量需要高分辨率的A/D转换器,测量系统采用ADS1255-24BIT高精度A/D转换器,以保证测量系统的有效分辨率。测试系统结构见图1。

图1 高精度水位测量系统结构图
2 比较式测量的系统误差校准
由图1分析,对测量结果的影响包括取样电路、跟随滤波电路、分压电路、A/D转换及参考基准等众多影响因素,消除所有因素十分困难,使得整个测量系统精度无法提高。由于水位测量无法实现直接比较测量,为此,引入替代比较式测量方法,将水位信息由传感器的输出电流替代,传感器的输出电流与水库水位之间为线性关系。
2.1 测量系统的系统误差
由测量本身引起的误差包括取样电阴不确定性、跟随器、滤波电路与分压电路、A/D转换电路以及A/D转换基准等 ,除了模拟通道不确定性等静态误差外,高精度测量温度系数对精度产生重大影响,在不考虑水压传感器影响前提下,图1所示的测量系统水压传感器输入电流Iin与A/D转换数字量值VAD之间的关系见公式(1):
式(1)中:VAD为水压传感器输入电流A/D转换数字值;R0为取样电阴在0 ℃时的电阴值,Ω;Vref为参考电压在0 ℃时输出电压值,V;K1为取样电阴温度影响因子;K2为滤波与分压电路温度影响因子;K3为A/D转换器温度影响因子;K4为A/D转换器参考电压温度影响因子;Iin为水压传感器输入电流,A。
由公式(1)可知,电路系统中K1、K2、K3、K4等众多温度影响因子增加了测量系统温度补偿的难度,从而限制了上述测量系统精度的进一步提高。
2.2 比较式测量原理及其误差的影响因素
比较式测量法是通过被测参数与某个标准量(校准件)进行比较,从而得出被测参数相对于标准量的偏差值。由于标准量是已知的,被测参数的测量值等于随机偏差值与已知标准量的代数和[5]。只要定标标准量,能便捷测出被测参数的整个量值,其测量精度得到有效保障。
在水库水位测量中,用电流型水压传感器的电流信号代替水位信息,为此,引入1个基准恒流源,其测量系统结构见图2。
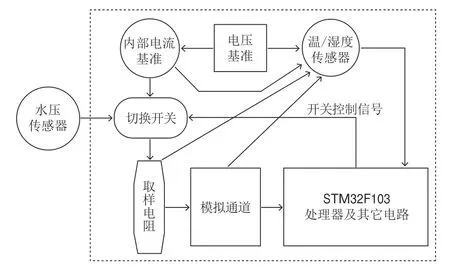
图2 基于电流比较式的水位测量系统结构图
电流开关由处理器控制,测量时分2步操作完成:①由处理器先切入测量系统内部的基准电流信号,并采集该信号;②将模拟通道切入待测量水位测量传感器,待系统稳定后,采集水位信号,利用比较测量算法计算出当前水位传感器的电流输出值,测量当前水位。
对于图2所示的测量系统,输入电流信号与对应的A/D转换值为线性关系,对应的A/D转换值见公式(2):

式(2)中:VADib为内部基准电流A/D转换数字值;Iib为内部基准电流信号,A;
水位深度传感器的输入电流信号Iin,其A/D转换值为:

对于公式(2)和(3),在短时间内,其电路温度认为是恒定的,所以其K1、K2、K3、K4等温度影响因子是相等的,将公式(1)和(2)进行比值,可得到:


由公式(4)可知,只要通过内部基准恒流源,就能测量传感器的输入电流,从而计算出当前水库的水位值。影响测量结果的只有Iib,只要对Iib进行温度补偿,就可以保证测量结果的准确性。Iin取决于Iib。
2.3 比较式测量温度补偿
由(4)式可知,测量精度受内部基准恒流源Iib的影响,为此系统采用LM134作为内部基准恒流源,并对LM134进行温度检测和补偿[6]。图3给出了LM134恒流源电路,其温度补偿可表示为:

图3 LM134恒流源电路图

式(5)中:K为LM134Z理论温度补偿系数,uV/°C,理论值为227(当设定2 uA≤Iib≤1 mA);T为LM134工作温度,℃;Rset为采样电阴在0 ℃时的电阴,Ω;Iib为内部基准电流信号,A。
电路设计中,Rset采用1‰精度,温度系数为25 PPM的68 Ω电阴。其设定内部基准电流理论值为0.995 mA(温度为25 ℃时)。
利用公式(3)~(4)进行温度补偿计算传感器的电流值。当温度大于 35 ℃时,其误差已经无法满足要求,为此,在25~55 ℃范围内对LMA134的基准电流进行试验分析,应用最小二乘法得到LM134温度补偿曲线。试验结果表明,单一的直线补偿结果并没有达到目标精度要求。再进一步采用分段线性补偿方法,将25~60℃范围内以5 ℃为1个区间划分为7个温度区间,分别在各区间内对LMA134的基准电流进行实验分析并应用最小二乘法得到分段补偿曲线(见图4)。

图4 测量系统内部基准LM134的温度分段补偿曲线图
3 水位测量系统的试验分析
3.1 KALMAN滤波原理及其误差分析
KALMAN滤波适用于含有不确定信息的动态系统,对系统下一步的走向做出有依据的预测,即使伴随着各种干扰,KALMAN滤波总是能指出真实发生的情况。该设计中,测量系统为一维线性系统,可适用于KALMAN滤波。
由2.2中得出的结论:替代比较式测量将水库水位转化为传感器采样的电流信号,其干扰因素对精度的影响通过采样电流的变化表现出来,因此可仅利用KALMAN滤波对电流信号进行分析处理以达到减少系统误差的目的。
根据KALMAN滤波原理,得到:

首先计算KALMAN增益系数:

式(7)中:eESTk-1为第k-1次的估计误差;eMEAk为测量误差,利用公式(3)和公式(6)计算根据计算结果更新eESTk:

应用公式(6)-(8)对采集数据进行KALMAN滤波结果以及误差值分析。为表征KALMAN滤波的效果,对3 m水位进行直接测量,经过20次的采样迭代,估计值趋于实际值。

图6 水库水位高精度检测KALMAN滤波数据误差图
通过图5~6,可以看出实验采样的KALMAN滤波算法的效果,对水位数据进行滤波处理后,所得估计值不断接近实际值,其误差可以控制在0.01 mm以内,消除了波浪、测量随机误差对测量结果的影响,有效提高测量精度。
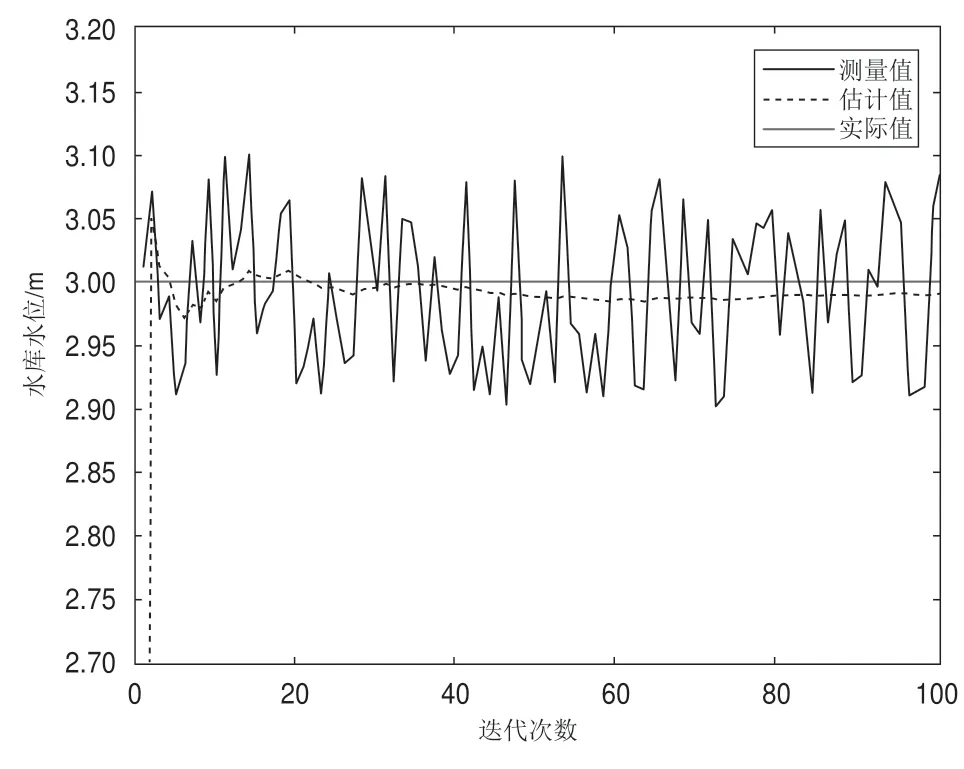
图5 水库水位高精度检测数据KALMAN滤波分析结果图
3.2 测量系统的温度特性性能分析
应用上述原理研制的高精度水库水位测量仪器,在25 ℃室温下对GE Druck的DPI620GD压力校准仪表(仪表电流输出精度为0.005%)提供的电流信号进行测量,测量结果见表1(最大量程FS按16 mA计算)。

表1 恒温下的输入电流测量结果表(25 ℃)
从表1可以分析出,其测量结果的相对误差达到仪表一级标准0.02等级要求。
在25~55℃温度范围,利用GE Druck的DPI620GD压力校准仪表产生4.236 7 mA恒流信号,得到表2的测量结果。
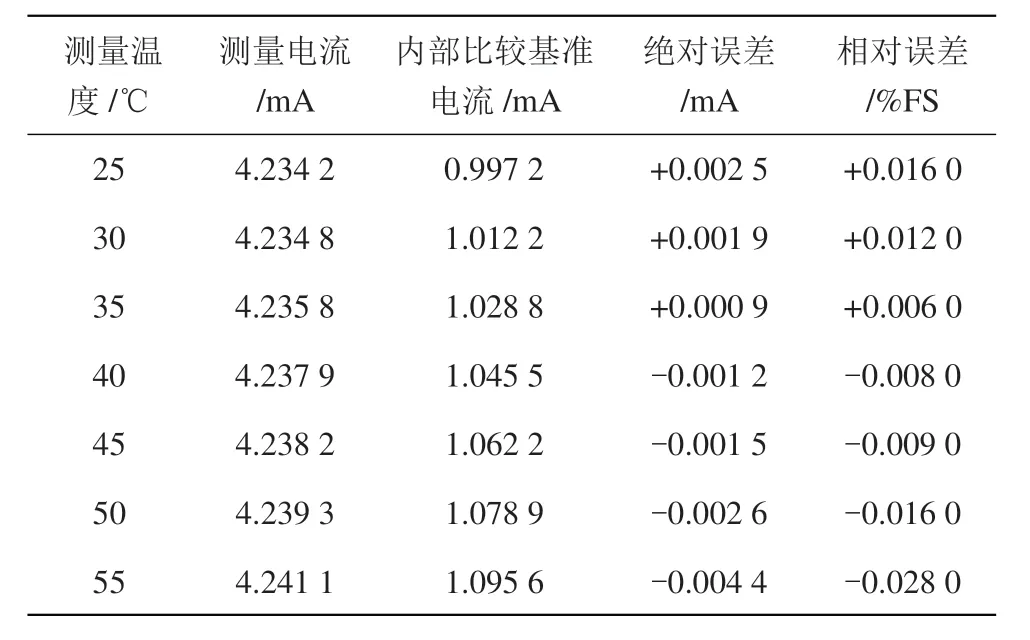
表2 1 mA标准输入电流在25~55 ℃温度范围的测量结果表
由表2可知,在25~55 ℃温度范围内,测量结果误差均在0.02等级,分段温度补偿方法提高了测量内部比较基准电流的精度,从而提高水位测量的精度。
表1与表2的试验结果表明,该测量方法及研发的测量装置,在实际应用的温度段范围内,对水位的测量精度满足仪表一级标准0.02等级的精度范围。
3.3 与直接测量系统的对比分析
应用高精度压力式水位传感器UNIK5000对不同水位进行测量,本系统设计比较式测量系统与传统的直接测量系统即水尺测量,结果见表3。

表3 比较测量法与直接式测量法的水位测量结果分析表 m
表3的结果表明,在40 m水位,传统直接测量法测量误差为0.22 m,本文研发的测量系统测量误差为0.02 m,大大优于直接测量法的测量结果。
4 结 语
本文从大型水库水位测量的实际需求与应用场景出发,提出基于电流压力传感器的比较式水位高精度测量方法,大大减少测量环节的系统误差,简化系统补偿环节;在程序处理中应用KALMAN滤波技术消除了水库波浪及测量随机误差的影响。试验结果表明,其测量精度达到仪表一级标准0.02等级的精度要求,为此类应用的高精度测量提供了新的测量方法。
