计及储能调节的时滞互联电力系统频率控制
2022-10-08丁枳尹
“双碳”目标下,新能源发电接入跨区域电网的比例逐年增加,但是由于新能源发电的随机性和间歇性,如何有效保证电力系统频率稳定成了一大问题.频率作为衡量电能质量的关键指标之一,其稳定性已经成为电网运行的现实要求.
为了有效解决功率波动产生的频率偏差过大问题,提高互联电力系统中可调发电单元的调频能力,负荷频率控制技术被广泛应用于互联电网.现代电力系统通常由多个区域电网互联组成,电网规模的扩大会使信号在传输过程中存在各种时滞问题,时滞的存在会使负荷频率控制器不能及时地接收信号和发出各种控制指令,从而无法实现预期的频率调控目标,甚至还会影响电力系统的动态稳定.因此,在研究电力系统负荷频率控制的过程中考虑延时的影响对于提升电力系统的频率稳定有重要作用.
国内外很多学者针对时滞电力系统的负荷频率控制进行了大量研究.文献[8]综合考虑时滞灵敏度指标和系统阻尼,通过多目标优化算法求解广域电力系统稳定器参数,有效抑制系统区域间的低频振荡.文献[9]通过构造含时滞依赖矩阵的李雅普诺夫泛函实现对时滞电力系统的稳定性分析.文献[10]针对交直流混联系统提出了直流附加频率控制和自动发电控制的协调策略,克服了时滞和参数不确定的影响.文献[11]提出了在时滞条件下利用电动汽车和电热泵协调控制系统频率的策略,但是电动汽车和电热泵的调频性能会受到用户使用习惯的影响.文献[12]将基于滑模算法的新型无模型控制器应用于含电动汽车的时滞孤岛微电网的二次调频中,但是并没有考虑互联电网.文献[13]虽然针对时滞互联电力系统的频率稳定设计了基于滑模算法的负荷频率控制器,但是滑模控制结构复杂,难以实现工程应用.比例积分微分(PID)控制由于设计简单、工程应用方便而常被用来设计负荷频率控制器.但是PID控制算法需要应用在系统稳定工作点附近才能发挥出不错的控制效果,新能源的接入以及通信延迟的存在使得电力系统的稳定运行点变化较大,如果不及时调整PID的控制参数,将会出现频率控制效果一般、影响系统稳定运行等问题.
此外,新能源的大规模接入使电力系统逐渐向低阻尼、低惯量方向发展,系统的调频能力有所减弱,而且传统火力发电机的调节速度具有一定滞后性,对互联电网的动态稳定产生影响.储能装置因响应速度快、可双向调节、布局灵活等优点可以有效弥补火电机组调频性能的不足,因此可配置储能装置为电力系统的频率调整提供功率支撑.文献[18]针对高风电渗透率下电力系统的频率波动问题,提出基于动态任务系数的储能辅助风电参与一次调频的控制策略,但是在高风电比例的电力系统中,仅依靠储能调节系统频率,会增加储能所需的容量.文献[19]提出按照储能的容量,与火电机组按比例共同承担系统的频率调整任务,但是没有考虑储能参与调频的过程中容量的动态变化情况.对于储能装置的控制,文献[20]提出将区域控制偏差及其变化率作为模糊控制器的输入量,采用模糊算法控制储能参与辅助调频,但是模糊规则的制定复杂且需要一定经验.分数阶理论和传统PID控制器的结合使传统PID控制器具有更好的动态性能和鲁棒性.文献[21]利用分数阶PID控制有效抑制了永磁同步电机交流伺服系统的位置扰动.文献[22]通过分数阶PID算法有效提高了列车的速度控制性能,满足了运行控制系统的控制精度和鲁棒性要求.
本文基于含风电、汽轮发电机和储能装置的时滞两区域互联电网模型,提出了计及储能调节的时滞互联电力系统频率控制策略.汽轮发电机和储能装置分别承担区域控制偏差(ACE)不同区间的调频任务.为了提高汽轮发电机的调频性能,在考虑通信延时的情况下,以系统的频率偏差为目标函数,通过改进粒子群算法优化PID负荷控制器的比例、积分、微分参数,用于控制汽轮发电机的运行.利用储能装置参与系统的辅助调频,通过分数阶PID控制器对储能装置的输出功率进行控制,平衡源荷间的功率波动,进一步优化系统的频率.最后在MATLAB/Simulink平台上验证了所提协调控制策略的有效性.
1 系统模型的建立
以计及时滞的两区域互联电力系统模型为例进行研究,其中包含汽轮发电机和风机等单元,并在两个区域中分别配置了储能装置,不同区域间可通过联络线实现功率交互,系统整体结构如图1所示.

1.1 储能装置模型
储能装置可以通过其变换器实现与电网功率的双向调节,保证电力系统的实时功率平衡,在参与电网的辅助调频时,跟踪控制信号进行充放电的过程需要一定的响应时间.为了便于分析,同时考虑到储能系统的静态特性,引入时滞环节,储能装置的等效模型可以用一阶惯性环节表示,设储能装置域的传递函数为

(1)
式中:为储能装置的时间常数.
近些年来,玉米种植区玉米粗缩病发病面积一直上升,危害逐年加重,成为玉米生产的主要病害之一。通过近些年对玉米粗缩病发生的影响因素做了分析,了解了玉米粗缩病的发生原因,并找到了防治该病的有效措施。
1.2 风机模型
朋友琳暑假在一个夏令营兼职,学员都是十岁左右的孩子,营地心理老师和孩子们曾开了一个小型座谈会,主题是你认为什么是最好的家庭教育。

(2)
式中:为调速器的时间常数;为汽轮机的时间常数.

(3)

由于风力发电机与风力涡轮机相连时风机的惯性远大于发电机,所以忽略发电机的暂态过程,风电的输出功率可表示为

(4)
式中:为相电压;ϑ=(-)为风力发电机的转差率,ω为风力机转子的角速度,为同步角速度;为转子电阻;为定子电阻;为定子电抗;为转子电抗.
1.3 汽轮发电机模型
为了充分发挥储能装置的辅助调频性能,采用分数阶PID控制器输出储能装置的功率参考信号,通过其对储能装置变换器的控制,可实现储能装置按调频要求输出有功功率.不同于传统PID控制,分数阶PID控制器本质是具有额外自由度的非整数积分微分,可以比传统PID控制器获得更优的动态性能和鲁棒性.分数阶PID的传递函数为

(5)

(6)
式中:为空气密度;为风力发电机的叶片半径;(,)为风能利用系数, 是叶尖速比和俯仰角的函数;为风速.其中,(,)可以表示为
论文针对“机械工程测试技术”课程多媒体教学资源的建设进行研究,总结和归纳了本课程在实际教学过程中的多媒体教学资源制作软件和方法。通过改进传统教学资源,旨在增强教学的灵活性和生动性,提升学生学习兴趣和积极性,让学生更为直观地理解和掌握课程知识点。
1.4 含风储互联电力系统的负荷频率控制模型
电力系统具有高度的非线性特征,但在稳定运行时,系统的扰动很小,因此可以在稳定运行点附近对系统进行线性化处理.以计及时滞的两区域互联电力系统负荷频率控制(LFC)模型为例进行研究,两区域互联电网中区域的数学模型如图2所示.图中:为系统频率偏差系数;为机组的调差系数;Δg为风电的功率输出变化量;ΔL为系统的负荷变化量;Δ为LFC控制器的输出信号;g为调速器的时间常数;t为汽轮机的时间常数;B为储能装置的时间常数;Δt为汽轮发电机的输出功率变化量;p为电力系统增益系数;p为电力系统时间常数;Δ和Δ分别为区域和的频率偏差,=1, 2,=1, 2且≠;Δ为储能装置的功率参考信号;ΔB为储能装置的功率输出;Δ为联络线功率偏差;为系统延迟时间; Δ为区域控制偏差信号的变化量;为两区域间的联络线功率系数.区域中功率和频率的关系为
(3)对钢轨进行打磨。波磨出现后,会反过来激化和加剧轮对黏滑振动,促进波磨进一步发展,波深越大则波磨发展越快,构成恶性循环。钢轨打磨中断了这种恶性循环的发展过程,减缓了波磨发展速率。

Δg-ΔL+Δ)
(7)

区域控制偏差信号的变化量为
Δ=Δ+Δ
(8)
2 频率控制策略
由于汽轮发电机响应速度和调节精度的限制,当系统频率变化时,若单独使用汽轮发电机参与调频,难以达到预期的频率调整效果,所以可利用储能装置协助汽轮发电机参与系统的辅助调频.为了更好地发挥两者的调频性能,本文根据系统的调频要求对汽轮发电机和储能装置的调频任务进行分工.根据ACE的变化范围划分汽轮发电机和储能装置的工作区间,定义为储能装置协助汽轮发电机参与辅助调频时ACE的参考值,当|Δ|≤时,系统的区域控制偏差变化较小,此时,仅由汽轮发电机承担系统的调频任务;当|Δ|>时,系统的区域控制偏差变化较大,此时将储能装置接入系统,辅助汽轮发电机共同参与频率调整.具体分工过程如图3所示.

2.1 基于改进粒子群算法优化的负荷频率控制器设计
汽轮发电机的二次调频通常由传统PID控制器根据设定的运行点进行调整,为了在系统运行状态发生变化时,及时调整负荷频率控制器的参数,克服手动调节参数的不确定性以及降低负荷频率控制器设计的复杂性.本文通过改进的粒子群算法优化PID负荷频率控制器的比例()、积分()及微分()系数,使系统始终工作在稳定运行点,从而满足频率稳定的要求.所设计的基于改进粒子群优化的负荷频率控制器如图4所示.
第一,科技法律直接促进科技的发展。从世界范围来看,为了促进本国的科技发展,各国均会制定科技方面的法律,直接保障科技的发展。以美国为例,美国特别关注科技法律的制定和完善,并通过科技法律促进了本国科学技术发展。

时滞情况下以减小系统的频率偏差为优化目标,将、、作为粒子的3个维度,粒子在第+1次迭代时速度和位置按下式进行更新:

(9)
在MATLAB/Simulink平台上建立含储能装置、风机并计及延时的两区域互联电网模型,两区域互联电力系统的仿真参数选取如表1所示.
为防止粒子群在迭代过程中陷入局部最优解,本文对基本粒子群的惯性权重、个体学习因子1和群体学习因子2进行动态调整在粒子群搜索的初期阶段,希望待优化的参数、、有较强的自我学习能力进行大范围的全局搜索,因此希望和1的值较大而2的值较小随着迭代次数的增加,为了提高算法的搜索精度,希望和1的值较小而2的值较大,使粒子群向全局最优方向搜索因此,将和1设置为随迭代次数递减的函数,而将2设置为随迭代次数递增的函数:
网格状带齿加筋砂垫层界面特性的细观机理分析···············张 骏 林永亮 (1,118)

(10)
式中:为最大迭代次数;和分别为惯性权重的最大值和最小值.
经过对比发现,单独外筒模型数值模拟结果比整体模型的数值模拟结果稍大,这是由于单独外筒模型荷载加载方式、荷载数据大小和模型处理采用了简化的处理方法,故而采用该结果计算烟囱结构会更加趋于安全。
为了在时滞条件下获得最佳的负荷频率控制性能,选择目标函数为

(11)
s.t. 001≤≤025
采用与上述相同的步骤可以从图6中得到公式(6)。图中存在两条从SeiSf0到De0Dfi的不相交双向因果路径,因此该模型是可逆的,由此可得:
010≤≤150
001≤≤020
在唐朝以前的东南海上通道——海上丝绸之路,就已经存在并有一定的发展。自中唐以来,由于中国经济重心向南方转移,加上造船技术水平的提高和新航线的不断开辟,这条海上丝绸之路开始繁荣起来,并逐渐替代了陆上丝绸之路的地位,成为中国开展对外商贸交往和人员往来的最重要通道。根据史料记载和考古发现,从宋朝开始,一直到清代,都有中国钱币通过这条通道持续流向东亚的日本和朝鲜,东南亚的越南、柬埔寨、泰国、新加坡、印度尼西亚、文莱等地。
根据式(11)所构造的目标函数,利用改进粒子群算法对其进行优化以获得最优的控制器参数值.具体优化步骤如下:首先根据系统的延迟时间初始化系统参数,并生成满足式(11)中约束条件的随机数;接着将满足条件的随机数代入到目标函数中,通过不断迭代寻找满足要求的最优值.
通过3个案例验证所提频率协调控制策略的有效性:案例1分析了不同时滞对系统频率稳定的影响;案例2验证了不同时滞条件下,本文所设计的改进粒子群优化PID(MPSO-PID)负荷频率控制器的频率稳定效果,将所设计的MPSO-PID负荷频率控制器分别与传统PID、模糊PID和粒子群优化PID(PSO-PID)负荷频率控制器进行对比;在案例3中对本文所设计的储能装置参与系统调频的方案进行了验证.最后,在案例4中将本文所提频率控制方式与两种不同频率控制方式进行对比,验证了所提频率控制方式的效果.其中,方式1为储能和汽轮发电机按比例响应ACE信号的频率控制方式;方式2为MPSO-PID控制汽轮发电机的同时,由传统PID控制储能的频率控制方式.
2.2 储能装置的分数阶PID控制
本文所采用的汽轮发电机主要包括调速器和汽轮机两部分,其中调速器通过控制汽门的开度进而控制汽轮机的输出功率,调速器和汽轮机的传递函数分别为

(12)
式中:和分别为控制器积分项和微分项的系数.根据ACE的变化,分数阶PID控制储能装置参与辅助调频的框图如图5所示.图中,()为区域控制偏差信号在域下的控制器输入量,ACE信号经过分数阶PID控制器转换为储能装置的功率参考信号Δ,通过对储能装置输出功率的控制,实现对系统频率的优化.

对于分数阶类非线性系统,为了在实际应用中实现分数阶行为,需要采用整数阶控制方法,一般通过近似离散化方法实现.常用的拟合方法为Oustaloup方法.Oustaloup分数阶算子的实现方法是使用零极点传递函数在频域中逼近分数阶算子.在拟合频段[,]内,以下公式提供了极点和零点的分布:
风能的特点是随天气的变化而变化,根据空气动力学原理,风力涡轮机捕获的风能与风速的3次方成正比,其输出的机械功率可以表示为

(13)

(14)

(15)
(16)

3 仿真验证
式中:()、()和分别为第次迭代时粒子的速度、位置以及惯性权重;1和2分别为第次迭代时的个体学习因子和群体学习因子;和分别为区间[0, 1]上均匀分布的随机数;()和()分别为第次迭代时的个体最优值和群体最优值.

我国社会主义和谐社会建设的伟大实践,既向思想政治教育学科建设与发展提出要求,也为高校思想政治教育学科建设与发展提供了基础。要有效解决当前高校思想政治教育所面临的重大理论与实际问题,提高师生思想政治教育水平,发挥思想政治教育在科教兴国、人才强国中的作用,必须加强思想政治教育学科建设的创新。高校思想政治教育学科建设的主要目标是通过建立和发展思想政治教育学科,科学揭示思想政治教育实践的本质和基本规律,用正确理论指导思想政治教育的实践。其要解决的核心问题是实现思想政治教育由实践形态向理论形态、由经验形态向学科形态、由学科形态向科学形态的转变。
3.1 案例1
为验证时滞对系统的影响,仅考虑汽轮发电机参与系统的频率调整,并采用传统的PID控制方式,以分析不同延迟时间对电力系统频率稳定的影响.假设系统在时间=10 s时发生标幺值(p.u.)为0.1的阶跃扰动,延迟时间=0.2,0.35,0.5 s时各区域的频率偏差如图6所示.

仿真结果表明,在同样的控制参数下,当=0.2 s时,系统频率大约经过25 s可以恢复稳定;当增加到0.35 s时,系统频率大约经过35 s可以达到稳定;而=0.5 s时,系统频率恢复稳定所需要的时间将近90 s.通过对比可以发现:系统的延迟时间越长,则系统的频率偏差越大,且恢复频率稳定所需的时间也更长.时滞不仅会影响系统的频率稳定,而且较长的时滞甚至会破坏系统的稳定运行.在系统运行状态发生变化时,如果不及时调整负荷频率控制器的参数,将会影响系统的稳定运行.
综上所述,在治疗盆腔炎的时候利用左氧氟沙星和物理方法联合治疗可以有效的提高临床治疗效果,改善患者的血液循环,促进患者身体恢复。
3.2 案例2
本案例验证了本文所设计的MPSO-PID负荷频率控制器在系统时滞情况下的频率控制效果.在仅考虑汽轮发电机参与调频的情况下,假定区域1和区域2在=10 s时受到标幺值为0.1的阶跃扰动,对比了分别为0.2、0.5 s时不同负荷频率控制器的调频效果,仿真结果如图7、8所示.


从图7、8中的仿真结果可以发现,本文所提MPSO-PID负荷频率控制器大约经过15 s便可恢复系统的频率稳定,相比于模糊PID负荷频率控制器和传统PID负荷频率控制器,所提MPSO-PID控制系统恢复稳定所需的时间更短.=0.5 s时,所设计的改进粒子群优化PID负荷频率控制器恢复频率稳定所需的时间仅为15 s,而传统PID控制下频率恢复稳定所需的时间为90 s.另外,本文设计的MPSO-PID和PSO-PID相比,其系统频率稳定效果也有所改善,由此说明本文所提出的改进粒子群算法的有效性.通过图7和8的对比可以清楚地得出结论:基于改进粒子群优化的PID的负荷频率控制器可以在时滞条件下有效发挥汽轮发电机的调频性能,减小系统的频率偏差,并使系统的频率快速恢复稳定.
3.3 案例3
为验证储能参与辅助调频的必要性,在本案例中对比MPSO-PID负荷频率控制方法在系统有、无储能情况下的频率偏差情况.其中,区域1受到随机负荷扰动和风电功率波动的影响,区域2则受到连续阶跃扰动的影响,分别为0.2和0.5 s时有、无储能参与辅助调频时的仿真结果如图9、10所示.


当=0.2 s时,储能参与辅助调频的系统,区域1和区域2的最大频率偏差分别为0.081和0.053 Hz;而储能未参加辅助调频的系统,区域1和区域2的最大频率偏差分别为0.166和0.099 Hz.通过对比可以发现,相比于储能未参加辅助调频的系统,储能参加辅助调频的系统频率偏差减小了约50%.=0.5 s时,储能参与辅助调频的系统,区域1和区域2的最大频率偏差分别为0.088以及 0.05 Hz;而储能未参加辅助调频的系统,区域1和区域2的最大频率偏差分别为0.196和0.12 Hz.整体对比可以发现,储能装置可以通过改变其功率输出,平滑源荷间的功率不平衡,使系统频率偏差减小,因此储能系统参与辅助调频有利于系统频率的稳定.
3.4 案例4
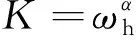
为了验证在有储能参与调频的情况下,所提频率控制方式的频率调整效果,将所提频率控制方式分别与频率控制方式1、2进行对比.假设区域1受到随机负荷扰动和风电功率波动的影响,区域2受到连续阶跃扰动的影响,不同延迟时间下3种频率控制方式的仿真结果如图11、12所示.

图11和图12分别对比了为0.2 s和0.5+0.2 sin时不同控制方式下的频率偏差情况.=0.2 s时,本文频率控制方式下区域1和区域2的最大频率偏差分别为0.081和0.053 Hz;频率控制方式1下,区域1和区域2的最大频率偏差分别为0.16 和0.11 Hz;频率控制方式2下,区域1和区域2的最大频率偏差分别为0.167和0.095 Hz.当=0.5+0.2sin时,本文的频率控制方式下区域1和区域2的最大频率偏差分别为0.088和0.049 Hz;而频率控制方式1下,区域1和区域2的最大频率偏差分别为0.185和0.12 Hz;频率控制方式2下,区域1和区域2的最大频率偏差分别为0.198和0.11 Hz.通过整体对比分析发现,同样是有储能参与辅助调频的系统,相比于频率控制方式1和2,本文所提频率控制方式下系统的频率变化更稳定,更有利于系统的稳定运行.
4 结论
新能源功率波动以及系统延时对频率稳定产生影响,仅依靠汽轮发电机进行频率调整并不能满足电能质量的要求,对此研究了储能装置协调汽轮发电机参与系统频率控制的策略,主要结论如下:
(1) 根据ACE的变化范围对汽轮发电机和储能装置进行调频任务的分工,以更好地发挥两者的调频性能.
数学是人类对客观世界的抽象,可以说没有数学,就没有人类文明,人类文明源于计数,经历了进制、比例、几何、图形、空间、变量、函数、高数等数学形式,专业化程度越来越高,学科体系越来越庞大,高职高数要想有所突破,必须打破传统教育的弊端,建立和专业结合的课程体系。
(2) 针对互联电网的通信延时以及新能源接入引起的频率波动等问题,设计基于改进粒子群参数优化的PID负荷频率控制器,可以在系统时滞情况下有效地发挥汽轮发电机的调频性能,抑制电网的频率波动.
(3) 利用储能装置响应速度快的特点为互联电网提供频率支撑,采用分数阶PID控制器对储能装置的输出功率进行控制,使其平衡源荷间的功率波动,进一步优化系统频率.
