基于一致性算法的微电网无功功率自动优化控制方法
2022-10-03李自愿杨光辉
冯 豆,李自愿,杨光辉,马 丽,赵 勇
(1.国网安徽省电力有限公司亳州供电公司,亳州 236800;2.合肥工业大学,合肥 230000)
0 引言
微电网是指由分布式电源、电力电子转换设备、分布式储能和负载等组成的具有发电量的电力网络。包含重要负荷和可中断负荷两类负荷,重要负荷支路装设若干分布式电源,若大电网发生故障则隔离开关断开,由分布式电源继续为敏感负荷提供电能。微电网具有并网和孤岛两种运行模式,可以在两种方式之间进行稳定的切换。在并网方式下,微电网既是“负荷”又是“电源”,通过公用节点与大电网相连,以保持自身电压、频率;当微型电网产生大量的电能时,可以将其用作电力供给大电网[1]。由于微电网中风力电池和光伏电池受风、光等自然条件影响,导致微电网的实际输出功率存在较高的波动性、随机性和间歇性,为此有必要对微电网的输出功率进行有效控制。
微电网的输出功率可以分为有功功率和无功功率两个部分,其中无功是指在一个有电抗的电路中,在一定的循环期间,电场或磁场会从电源中吸取电力,而在一定的时间里,电流的平均功率为0,但是在供电和电抗单元之间不断地进行着能量的转换,而无功功率也就是交换率的最大值。由于有功功率是维持微电网中用电设备正常运行所需的电功率,因此微电网输出功率的控制目标即为无功功率。
从现阶段微电网无功功率自动优化控制方法的研究与应用情况来看,基于动态下垂系数的控制方法和基于改进虚拟同步发电机控制技术的无功功率控制方法的应用范围较广,然而通过对应用反馈的分析,发现上述现有的控制方法在性能方面存在明显问题,主要体现在控制精度方面,为此有必要在传统控制方法的基础上对其进行优化。一致性在分布式系统中,可以理解为多个节点中数据的值是一致的,运行原理与微电网无功功率的控制目标一致,将一致性算法应用到微电网无功功率自动优化控制方法的优化设计工作中,以期能够提高方法的控制性能,间接的保证微电网的运行稳定。
1 微电网无功功率自动优化控制方法设计
1.1 构建微电网结构模型
微电网主要由开关、微型电源、储能器件、电力电子器件、通讯器件等部分组成。微电网中的开关主要是将微电网和大型电网的静态开关与截断线与微型电源相分离,而微网中的小型电源则是由各种可再生能源组成,包括光伏电池、风力发电机组、储能蓄电池等,以及可调度的微源[2]。根据不同元件的工作原理,对上述元件进行连接,确定微电网的基本拓扑结构如图1所示。

图1 微电网分布式结构图
图1中微电网包括光伏阵列、风力发电机以及储能蓄电池三种形式的电源,并以分布式的方式进行连接,其中光伏阵列电源的数学模型可以表示为:

式(1)中变量Ilight和Isat分别表示的是光生电流和饱和电流,q为光伏阵列中的电荷量,Ulight为光伏阵列的端电压,λl和γl对应的是比例因子和玻尔兹曼常数。另外储能蓄电池的数学模型可以表示为:

式(2)中nc为微电网中储电池的连接数量,E为电池在初始状态下的内部电压电势,μ为电池容量的变化系数,i(τ)表示内部电流,Qsur和λu分别为电池的剩余电量和电压常数,C表示电池的额定容量[3]。同理可以得出微电网中风力发电机的数学模型构建结果。根据电池的发电方式,可以将微电网大体分为直流微电网和交流微电网两种类型,在通信拓扑网络的支持下,完成微电网各节点之间的信息通信。
1.2 自动监测微电网实时无功功率数据
在构建的微电网结构模型下,对其无功功率进行监测,得到当前微电网无功功率的运行数据。在微电网的并网运行模式下,微电网中的线路与发电机组相连,从而持续向外输电,而在孤岛运行模式下,微电网与多个电力系统经公共连接点连接,且其余电力系统在电气上分离。孤岛模式下,微电网的瞬时无功功率可以表示为:

式(3)中U和Z分别为微电网电压和电抗,φ和θ分别为输出电压和线路的角度,AU表示的是微电网输出电压幅值。同理可以得出并网状态下的无功功率如下:

式(4)中变量Rline为微电网线路的电阻值。由于微电网处于实时运行的状态,因此微电网中的无功功率会产生实时变化,微电网任意节点i上的无功潮流可以表示为:

式(5)中Wi和Ui分别为节点i上的分流电纳和电压,Uter为微电网中电源端的实时输出电压,计算结果Pi为节点i在任意时刻的无功功率值。在实际的无功功率数据自动监测过程中,以微电网结构模型为背景设置多个监测点,在考虑微电网运行模式和无功潮流波动的情况下,得出微电网无功功率实时数据的自动监测结果。
1.3 利用一致性算法计算无功功率控制量
一致性算法是指在微网拓扑结构中,节点信息逐步趋于均匀一致的一种迭代法[4]。为了适应微电网的分布式电源结构,提高微电网任意两个节点之间的通信效率,应用一致性算法根据微电网各个节点之间的通信差异,计算无功功率的控制量。统计微电网中分布式电源的数量,记为nDG。当节点状态满足如下条件时,证明微电网状态达成一致。

式(6)中ψi和ψj分别表示微电网结构模型中节点i和j的状态值,为了确保微电网中分布式节点的状态量在动态运行状态下的精准一致性,连续时间下可将一致性算法量化表示为:

式(7)中ψi(t)和ψi(t+1)分别表示节点i在t和t+1时刻的状态值,变量δij和ϖ分别对应的是微电网图拓扑的邻接矩阵元素和一致性算法边的权重值。一致性算法的收敛率与初始值相关,通过一致性算法得到微电网在稳态状态下的表达式为:

式(8)中hi(t)表示一致性算法的输入信号,也就是实时微电网实时无功功率的监测数据。从以上分析可以看出,一致性算法可通过迭代来达到整体一致性,从而达到分布式电力系统协调控制的目的。在实际应用中,为使整个微电网的各个节点都能达到收敛的目的,要求微电网中所有节点均具有连通性,无独立存在的节点,同时分布式电源之间的通讯是双向存在的。通过一致性算法的迭代运算,可以得出微电网无功功率控制量的计算结果为:

将式(7)的计算结果与无功功率的实时监测数据代入到式(9)中,即可得出无功功率控制量的计算结果。在实际计算过程中,需要根据微电网的运行状态,调整Pi的具体取值。
1.4 优化设计无功功率控制器
为支持一致性算法的运行,并适应微电网的运行特性,选择直接采用分布式电源输出功率进行控制,并利用控制器作为硬件支持。图2是无功功率控制器的基本结构。

图2 一致性算法无功功率分配控制器结构图
将微电网实时无功功率的监测输入导入到图2表所示的控制器中,通过一致性算法的运行得出无功功率的控制量,并生成相应的控制信号[5]。将控制信号作用在分布式电源以及输电线路中,实时反馈控制功率量,并对无功功率的控制信号进行调整。
1.5 实现微电网无功功率自动优化控制
从无功功率平衡、微电网无功出力容量以及最低功率因数三个方面设置微电网在无功功率控制过程中的约束条件。为微电网环境中,无功功率的交换过程如图3所示。
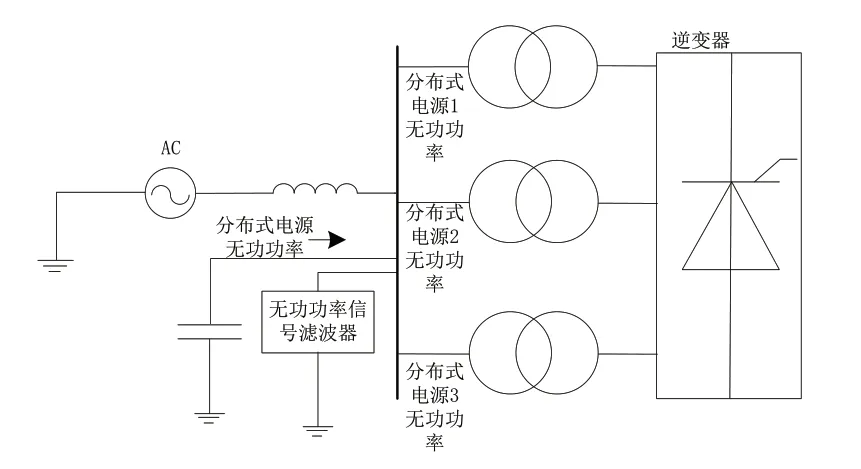
图3 微电网无功功率交换原理图
根据图3表示的无功功率交换原理,设置无功功率在控制过程中的平衡约束条件如式(10)所示:

其中Ps和Pa分别为微电网线路上的无功损耗和负荷功率。另外无功出力容量与最低功率因数的约束条件设置结果如式(11)所示:
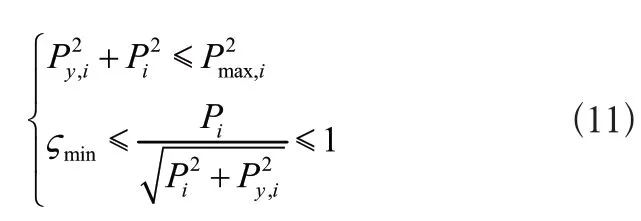
其中Py,i为节点i上的有功功率,Pmax为最大视在功率,mςmin表示的是微电网运行要求的最低功率因数。由此完成控制任务约束条件的设置,并将其导入到设计的控制器中。在并网方式下,微网的AC侧开关是关闭的,AC微网的电源平衡和电压和频率稳定都是由大电网来保证的。采用PQ方式下的AC侧混合蓄能系统,以保证孤岛状态下的充放电能力,并将混合蓄能的能量以正常的方式进行控制,从而达到MPPT模式下的最大利用率,其主要目的在于保持直流侧的电源均衡和电压的稳定性。在并网过程中,采用直流侧的混合蓄能装置对电力进行均衡,通过合理的两边电源切换,使直流侧的混合蓄电保持在正常的水平,从而降低系统的电源电压。在孤岛模式下,微网的交流侧开关被切断,电力平衡仍是由直流侧的混合存储单元来维持,无需更改控制策略,降低了对微电网的稳定性和无缝切换的影响,利用优化设计的无功功率控制器,实现微电网无功功率的自动控制。
2 控制效果测试实验分析
2.1 微电网拓扑及配置参数
为了给基于一致性算法的微电网无功功率控制效果测试提供研究对象,构建直流微电网和交流微电网,其中直流微电网的拓扑结构如图4所示。

图4 微电网研究对象拓扑图
从图4中可以看出,构建的微电网利用2个光伏电机、2个风机、4个储能蓄电池以及3个用电终端,组成三条馈线,且馈线长度均相等,并以相同的方式连接在微电网母线上。微电网中光伏发电机的额定输出电压为600V,其有功功率和视在功率的最大值分别为12kW和15kVar,风机1与风机2的型号相同,风机的额定有功功率为13kW,另外储能蓄电池的额定功率均为15kW,微电网馈线终端连接的用电设备功率均为25kW。同理可以得出交流微电网的构建结果。为考虑到微电网的运行状态,设置并网和孤岛两种运行方式,并在微电网中安装并网开关,实现两种运行方式之间的相互切换。
2.2 生成微电网无功功率控制任务
微电网无功功率自动优化控制方法的控制目的分为两个部分,一个是保证微电网上各个节点的无功功率处于稳定状态,另一部分就是控制微电网的实际无功功率与预期结果一致。在已知微电网组成设备以及工作参数的情况下,设置多个控制任务,部分控制任务的设置情况如表1所示。

表1 微电网无功功率控制任务说明
除上述控制任务外,还需保证控制作用下微电网无功功率的波动稳定。
2.3 描述控制效果测试实验过程
优化设计的微电网无功功率自动优化控制方法应用了一致性算法,需要将一致性算法与控制方法进行编码,导入到实验环境中。启动微电网中的发电装置,得出初始状态下微电网无功功率的跟踪结果。图5表所示的是直流微电网在并网运行状态下的无功功率波动曲线。

图5 并网状态下直流微电网无功功率波动曲线
将微电网控制任务输入到控制方法中,同时启动一致性算法和控制程序,得出微电网无功功率的自动控制结果,如图6所示。

图6 直流微电网无功功率自动控制结果
按照上述方式可以得出交流微电网在并网、孤岛环境下的无功功率控制结果。
2.4 设置控制效果测试指标
根据优化设计方法的控制目标,分别设置无功功率控制误差和稳定系数两个指标作为实验的量化测试指标,其中无功功率控制误差指标的数值结果如下:

式(12)中Pi,control表示的是微电网节点i在控制方法下的实际无功功率,Pi,target为节点i无功功率的控制目标。另外无功功率波动系数主要针对的是空间维度上的波动系数,其中数值结果为:
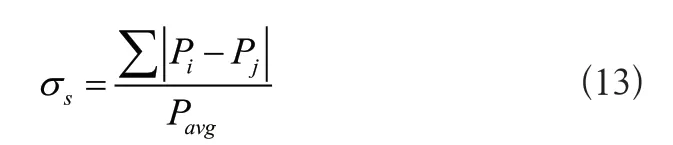
式(13)中Pi和Pj对应的是微电网中节点i和j的无功功率,变量Pavg表示的是无功功率的平均值。为了保证优化设计方法的控制效果,要求无功功率的控制误差不得高于1.0kVar,且波动系数不得高于0.1。
2.5 控制效果测试结果与分析
在微电网无功功率自动优化控制方法运行下,调取微电网各个节点的实际无功功率数据,得出无功功率控制误差的测试结果,如表2所示。

表2 微电网无功功率控制误差测试数据表
表2中的数据为控制方法执行K01任务时的输出结果,将表2中的数据代入到公式12中,可以得出设计方法在直流和交流微电网环境中,无功功率的平均控制误差分别为0.13kVar和0.33kVar,均低于1.0kVar。将表2中的数据代入到公式13中,综合两种微电网环境,可以得出微电网无功功率在空间维度上波动系数的平均值为0.009,远低于预设值。
3 结语
在微电网环境中无功功率的波动幅度和频度会对微电网的稳定运行产生直接影响,综合考虑微电网并网和孤岛两种运行状态,通过一致性算法的应用,有效提高了微电网无功功率自动优化控制方法的控制效果,对于微电网的稳定运行具有积极作用。从实验结果中可以看出,优化设计的控制方法适配于直流微电网和交流微电网两种环境,且在直流微电网中的控制效果更佳。
