卧式下肢康复机器人训练动作规划与实验分析
2022-10-03韩建海郭冰菁李向攀
杨 元,韩建海,2*,郭冰菁,2,李向攀,2
(1.河南科技大学 机电工程学院,洛阳 471003;2.河南省机器人与智能系统重点实验室,洛阳 471003)
0 引言
脑卒中患者普遍存在下肢功能障碍后遗症,目前,我国已有超700万的脑卒中患者,其中超过70%的患者需要进行运动康复训练,重塑神经系统,恢复下肢运动功能,然而在我国专业的康复技术人员不足5万,康复医师和治疗师缺口巨大,导致很多患者无法接受运动康复治疗或者错过最佳的治疗时机[1,2]。同时,传统的人工康复训练效果依赖于康复医师的经验和水平,训练过程力度、速度、角度等参数的一致性难以保证,影响训练效果[3]。因此,结合现代机器人运动控制技术,开发智能设备代替康复医师,辅助患者进行有效的运动康复训练,可以很大程度缓解康复医师短缺的问题,同时保证康复训练的持续性和参数一致性,有效的提升康复效果[4]。
近年来,随着医疗康复领域市场的进一步开放和扩大,国内外研究人员在康复机器人领域也做了大量的研究。在国外,巴黎大学的Mohammed团队针对膝关节康复开发了一款可穿戴式下肢康复机器人,对关节位置进行实时追踪,保证了系统的稳定性和安全性。Swortech SA公司推出的Motion Maker坐卧式下肢康复机器人可以实现髋膝踝三个关节的康复训练,能够自动适应不同身高的患者[5,6]。国内哈尔滨工程大学张立勋团队研发的下肢康复机器人通过拖动患者双脚,模拟站立时的走路过程,通过对人体动力学建模将人机系统融合,提高了康复训练的安全性和舒适性;燕山大学王洪波团队设计坐式下肢康复机器人,结构形式采用空间四自由度串并混联,可实现下肢髋、膝关节协同康复[7]。
目前,已研制的下肢康复机器人功能较为单一,仅能实现少数的康复动作,一定程度上制约了康复机器人的适用范围。因此本文将现代康复学理论与机器人学相融合,针对人体下肢髋、膝、踝关节的康复训练,规划了多种康复动作满足不同患者的康复需求,同时通过实验分析验证了动作规划的合理性。
1 系统总体设计
卧式下肢康复机器人系统主要由控制系统和机械本体组成,如图1所示。系统的机械本体部分主要包括大腿、小腿、两个机械臂及脚踏板、小腿托板,用于支撑固定患者腿部;髋、膝、踝关节电机、减速器及同步带等传动部件,提供动力带动患者下肢运动,完成各种康复动作;同时为了保障训练过程的安全,还设计了各关节机械限位机构限制关节运动角度范围,防止机器人过度运动产生安全问题。下肢康复机器人机械结构如图2所示。
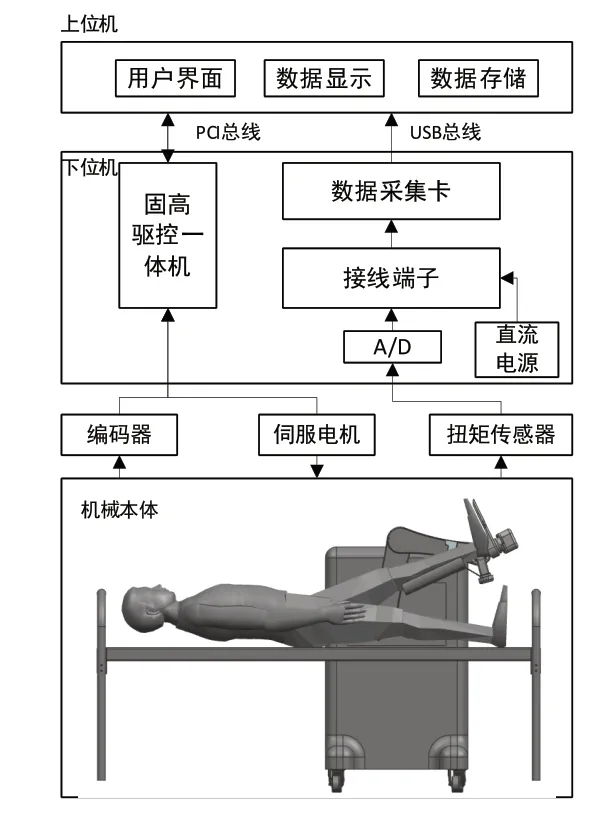
图1 系统总体方案
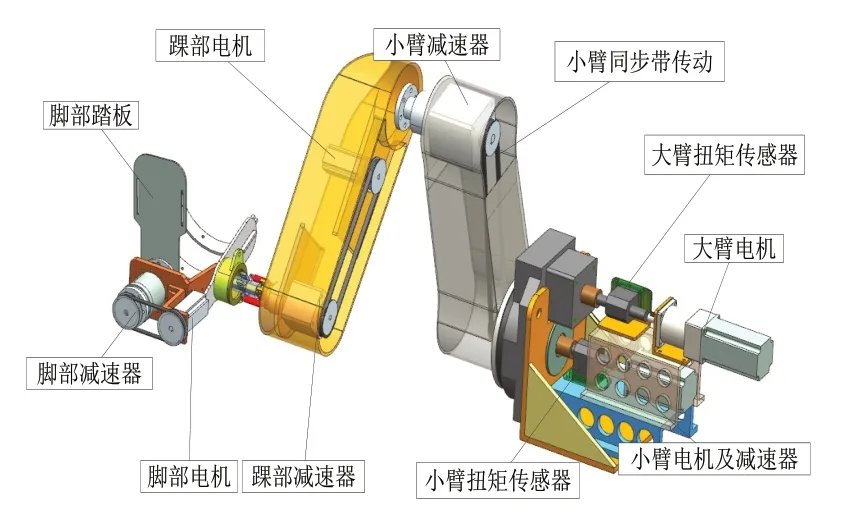
图2 下肢康复机器人机械结构
控制系统主要由上位机(固高OtoStudio开发界面)和下位机(固高四轴驱控一体机)组成,通过上位机发送控制信号给下位机的驱控一体机,一体机驱动部分驱动电机运动,实现机器人的预定轨迹运动,运动过程中各个关节的角度变化中通过编码器交换传输至驱控一体机和上位机。下位机的数据采集卡接收扭矩传感器信号实时监测康复训练过程中关节扭矩变化值。上位机通过OtoStudio开发控制界面完成整个控制系统的管理、轨迹的规划,将下位机采集到的数据转化为相应的动态曲线来监控各关节的动作,并为康复训练者建立数据库,便于治疗师监测病人康复训练的运动参数,为病人制定下一步康复计划[8]。上位机与下位机之间通过总线耦合,提高了系统的工作速度和机构的控制性能。
2 运动学建模分析
本文设计的卧式下肢康复机器人属于末端牵引类型,在人体矢状面具有三个关节,三关节轴心与人体脚踝中心对齐,人小腿和脚部固定在机器人上,腿人腿可以看作是三自由度机械臂,建立机器人与人腿运动学各关节角度和位置的映射关系,是通过机器人运动实现人体康复动作的基础。
2.1 下肢康复机器人逆运动学分析
运用D-H参数法建立下肢康复机器人各关节的关系,其D-H参数示意图,如图3所示,
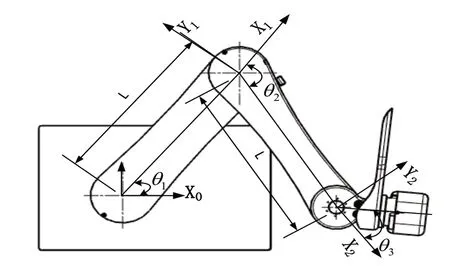
图3 下肢康复机器人D-H参数示意图
下肢康复机器人D-H参数表如表1所示。

表1 机器人D-H参数表
求运动学逆解得:

2.2 人体下肢运动学分析
运用D-H参数法建立下肢各关节在人体矢状面的关系,其D-H参数示意图,如图4所示。

图4 人体下肢D-H参数示意图
人体下肢矢状面的D-H参数表如表2所示。
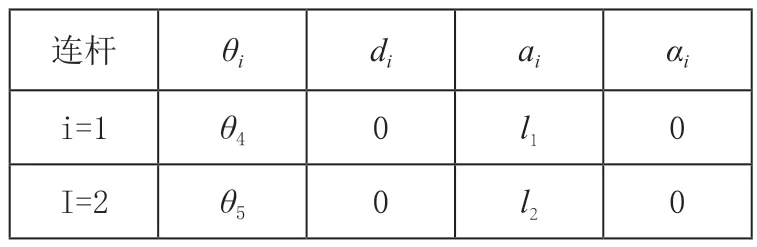
表2 人体下肢D-H参数表
求运动学正解得:

2.3 机器人与人体下肢运动学一体化分析
由以上两节可得到由人体关节角度可逆推出机器人关节的角度,确定人体髋关节和膝关节的角分别为θ4、θ5,如图5所示。由于机器人的三关节和人体的脚踝的旋转角度一致,所以可以认为两个坐标系下末端姿态一致,即人体坐标系下和机器人坐标系下的运动学建模得到的旋转分量是相同的,平移分量的关系与两个坐标系的关系相同,则有:
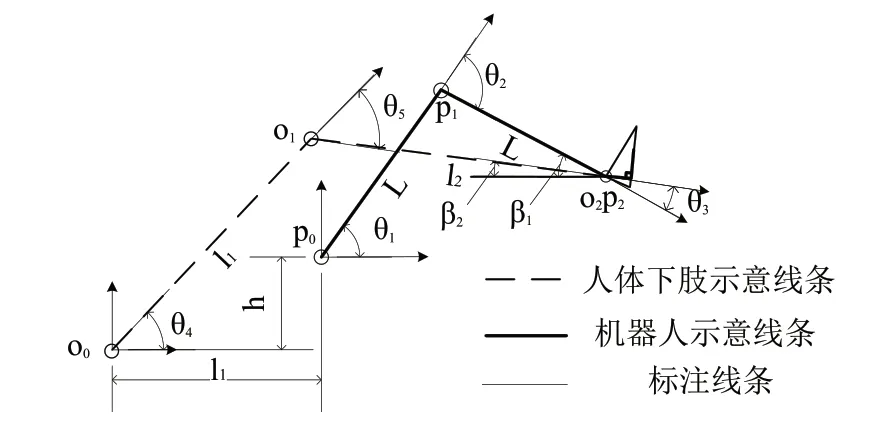
图5 机器人与人体下肢一体化示意图


机器人关节位置坐标(x1,y1)和(x1,y2)的关系是:

其中l1为人大腿长度,h为病床高度。
通过式(1)~式(5),建立了适应不同人体下肢和病床高度的人机一体化模型,得出机器人与人体运动过程中的角度变化关系,上位机输入康复动作角度变化,转化成机器人关节角度变化,通过离线编程的方式输入驱控一体机,驱动机器人运动。
3 训练动作设计与模式规划
人体下肢包括髋、膝、踝三个关节,下肢运动功能障碍患者的患病形式多种多样,所以适用不同的患者的康复形式也有很大区别。本文根据成年人体在矢状面下肢各髋、膝、踝关节活动范围(如表3所示),结合现代康复学原理,在患者躺卧姿态下,设计了满足不同患者需求的多种训练动作,同时每个动作设置了不同的速度和时间模式,帮助患者进行有效的被动康复训练[9]。
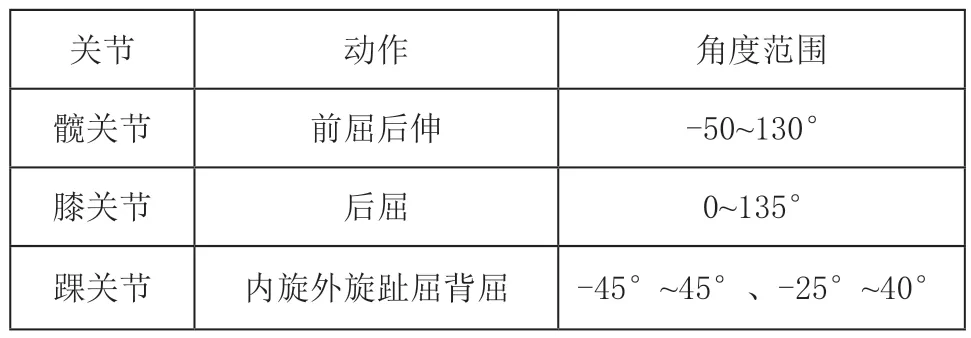
表3 人体下肢运动范围表
髋关节的康复训练主要采用直抬腿方式,如图6所示,膝、踝关节保持不动的前提下,在人体下肢角度运动范围内,尽量增大髋关节的训练角度,这种训练方式有助于拉伸大腿和大腿根部筋络,同时由于患者在康复过程中腿部整体处于笔直状态,更助于腿部血液流通,针对不同程度髋关节运动障碍患者,训练角度可调,一般训练角度范围在35°~75°之间。
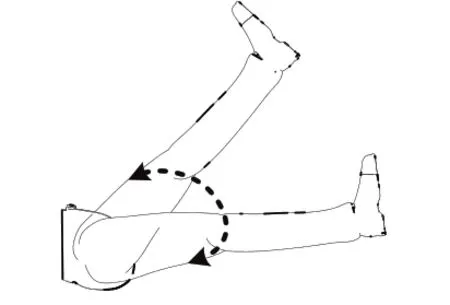
图6 直抬腿训练
膝关节的单独训练模式主要是将患者髋关节抬起70°至100°持不动,小腿上下摆动进行膝关节的运动康复训练,如图7所示。这种训练方式由于髋关节保持抬高且不动,有助于患者大腿肌肉力量的提升,同时有助于增大膝关节的训练角度,结合机器人运动学,实现了康复过程角度速度可调,膝关节训练角度一般在40°~100°之间。

图7 膝关节抬升训练
针对异常步态的下肢运动功能障碍患者,设计了髋膝协同康复训练动作,如图8所示,康复训练过程中髋膝关节联动,脚部保持在水平面上,模拟人体行走时的弯腿伸腿动作[10],训练角度范围大于正常行走时的角度变化范围,相对于传统的站立式康复,大角度训练康复效率更高,效果也更加明显,髋关节的训练角度范围在0°至85°之间,膝关节的角度在30°~180°之间。

图8 髋膝关节协同训练
人体踝关节有两个自由度,踝关节的康复训练通过机器人三轴、四轴带动固定在脚踏板的患者脚部运动实现,整体运动比较简单。如图9(a)所示,对患者踝关节进行趾屈、背屈拉伸训练,趾屈康复训练角度范围在0°~20°之间,背屈训练角度在0°~45°之间;如图9(b)所示,进行踝关节内旋外旋训练,内旋角度范围在0°~25°之间,内旋角度范围在0°~45°之间。趾屈背屈与内旋外旋动作协同进行,可实现髋关节的环绕康复训练。
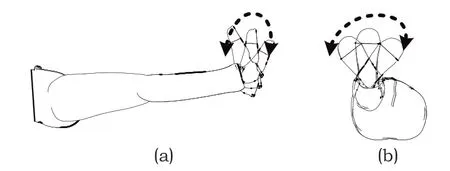
图9 踝关节训练
上述均为单个动作,通过上位机编程,可实现各个动作的自由组合使用,同时每个动作均设置了角度渐增模式、中间速度调节模式、等速训练等模式,实现康复训练多样化[11]。
4 实验与分析
实验时,以健康人(身高1.72m,年龄22岁,中国男性)为测试对象,将测试对象的左小腿和左脚分别固定在康复机器人的腿托和脚踏板上,经实际测量测试对象大腿长470mm,小腿长410mm,即式(2)中l1=470,l2=410。将数据输入上位机控制程序中,康复周期设置为20s,实验过程中采集电机编码器信号,获得实际位置角度与规划位置角度对比分析位置跟踪效果。
以直抬腿动作为例进行康复训练动作实验,动作示意图如图5所示,实验图如图10所示,髋关节康复角度设置为45°,定义康复机器人大臂与垂直方向y轴夹角为关节一位置角度,大臂小臂夹角为关节二位置角度,小腿托板方向与小臂夹角为关节三位置角度,顺时针旋转角度为正,逆时针旋转为负。采集电机编码器角度信息,分析处理得到三个关节规划位置角度与实际位置角度,如图11所示。

图10 直抬腿动作实验

图11 关节位置跟踪曲线
实验结果分析:
1)康复机器人对测试对象进行康复训练过程中,机械系统整体运动平稳无死点,无干涉情况,证明机械结构设计合理,满足实验条件要求;
2)机器人在康复训练起始阶段响应迟滞较小,有一定的响应误差但误差较小,不超过0.5°,位置变化曲线光滑,响应误差不影响运动的平稳性;康复训练中间阶段,位置跟踪误差较起始阶段减小至0.2°以内,整体运动平稳;中间换向阶段,速度平稳过渡为0,未出现跳动现象;康复训练终止阶段,误差值未明显增大,保持在0.5°以内;康复周期与预设一致,均为20s;
3)实验过程中,测试对象下肢按预定康复动作运动,测试对象感觉平稳舒适,未出现明显的扭拽等剧烈动作,说明康复机器人与人体下肢一体化运动学分析正确,系统整体运行安全可靠。
5 结语
基于末端牵引类型的卧式下肢康复机器人,利用运动学原理构建了人机一体化模型,结合康复效原理设计了多种人体下肢康复动作并进行实验,实验表明,康复机器人系统设计满足各个康复动作需求,康复机器人三关节误差均小于0.5°,精度符合要求,且整个实验过程运行平稳,受试者感觉舒适,满足了被动康复要求。
