基于Chaos-AHPSO-PID的电动自行车辅助刹车系统设计
2022-09-30陶玉贵
王 勇,陶玉贵
(芜湖职业技术学院信息与人工智能学院,安徽 芜湖 241006)
0 引言
电动自行车价格适中,方便易用,清洁环保,在我国被广泛使用。目前,我国的电动自行车的保有量约有2.5亿辆[1]。电动自行车的性能关系到广大骑行人员的安全。在雨雪天气、路面湿滑的情况下,电动自行车在紧急制动时由于车轮抱死会造成制动效果不好,甚至出现车身侧向甩动的情况,严重威胁骑行人员的安全。设计一种成本低廉、稳定可靠的电动自行车刹车辅助系统,防止电动自行车在紧急刹车时车轮抱死,显得十分重要。相比于汽车,电动自行车的车身结构简单,多采用无刷直流电机驱动,控制便捷,为电动自行车辅助刹车系统的设计提供了可能。
1 动力学分析

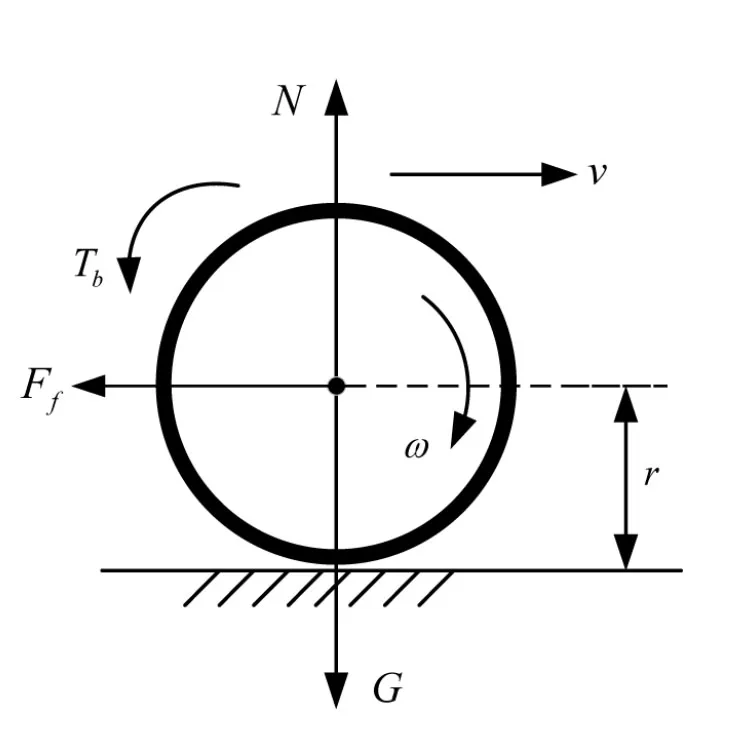
图1 轮胎模型
在电动自行车制动过程中,骑行者按下刹车手柄,制动器对车轮产生的制动力为Fb,产生的制动力矩为Tb=Fbr。同时,车轮受到地面提供的与行驶方向相反的地面摩擦力为Ff。车轮制动过程中的动力学模型如式(1)和(2)所示。
(1)
(2)
其中,J为转动惯量,μ为地面的摩擦系数,μ与制动过程中的车轮滑移率λ有关。
式(3)为Paceika魔术公式。其中,a,b,c为待定参数,与轮胎的花纹、宽度和地面湿度等因素有关。如图2所示,在滑移率λ为0.2左右时,车辆受到的纵向制动力最大,制动效果最好[2]。
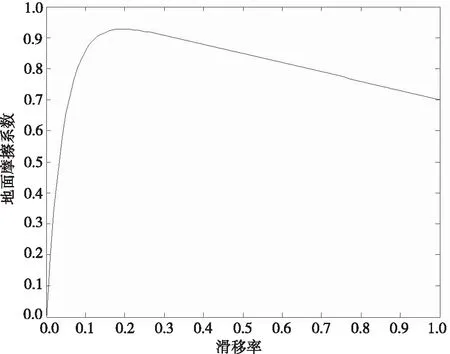
图2 Paceika公式函数图像
μ=a(1-e-λb-cλ).
(3)
2 控制系统设计
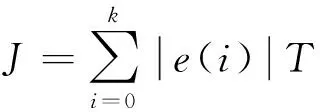
汽车质量大、结构复杂,导致控制难度大,制动防抱死系统价格昂贵。而与汽车不同的是,电动自行车质量小、结构简单,多采用无刷直流电机驱动,控制算法成熟,能够精确控制电机轴输出的电磁转矩。各类传感器的精度与微控制器的运算速度日新月异,为设计低成本电动自行车的辅助刹车系统提供了可能性。电动自行车辅助刹车系统的结构框图如图3所示。制动过程中,制动系统控制车轮滑移率λ=0.2,获取最大制动力。微控制器计算出当前时刻车辆滑移率的目标值λ′与实际值λ的差值e,经过PID运算得到控制器的输出量Δout。Δout经电机驱动模块精确控制无刷直流电机输出的电磁转矩Tfoc。Tfoc与制动器输出的制动转矩Tb共同作用于车轮。调节电动自行车车轮的转速rω,稳定实际滑移率λ,直至车辆相对地面停止。微控制器每隔采样周期T通过霍尔传感器或者采样电阻检测电机每相电压的过零点,可精确测得车轮角速度的采样序列ω(1),ω(2),…,ω(k-1)。微控制器通过加速度传感器测量电动自行车车身前进方向的加速度,形成加速度序列a(1),a(2),…,a(k-1)。在k-1时刻,骑行者按下刹车装置,触发微控制器的中断。在k时刻,微控制器计算出车身速度v(k)=rω(k-1)+a(k-1)T。从而计算出k时刻电动自行车的滑移率:

图3 控制策略框图
(4)
第k时刻,系统的目标滑移率λ′(k)=0.2,以目标滑移率与实际滑移率之间的差值e(k)=λ′(k)-λ(k)作为数字PID控制器的输入量。经过增量式PID运算后,得到PID控制器的输出量:
(5)
其中,Kp,Ti,Td分别为数字PID待整定参数,直接影响最终的控制效果。
3 混沌自适应混合粒子群算法整定PID参数
电动自行车动力学模型中存在时滞性、非线性环节,增加了数字的PID控制器参数整定的难度。使用粒子群算法这一类群体寻优智能算法,求解这一类问题具有精度高、运算方便的优点。在整定PID参数的过程中,生成一个由n个粒子组成的种群,在可行域内运动搜索全局最优解。首先如式(6)所示,用Logistic映射生成一个n×3的向量X=(X1,X2,…,Xn)T作为初始种群,使个体在空间中分布更为均匀,降低陷入局部最优的概率。
Xi+1=μXi(1-Xi).
(6)

(7)
(8)
其中,r1,r2为加速度因子,取[0,1]之间的随机数。
ω(k)=ωs-(ωs-ωe)(k/Tmax)2,
(9)
其中,ωs为初始惯性权重,ωe为终止惯性权重,Tmax为最大迭代次数。
在[-b,b]区间内使用双曲正切函数分别按照式(10)(11)更新加速度系数c1,c2的值,随着迭代次数k的增加,分别在[c1min,c1max]和[c2min,c2max]范围内自适应寻优过程:
(10)
(11)
(12)
(13)
其中,r为[0,1]之间的随机数,a=2-2(k/Tmax),A=2ar-a。
4 Simulink仿真
为了验证算法的有效性,基于MATLAB/Simulink软件搭建仿真模型,如图4所示。将执行机构等价成一阶惯性环节,车轮的半径是0.3 m。电动自行车与骑行者的总质量M=100 kg。重力加速度g=9.8 m/s2,车辆的制动初速度为16 m/s。
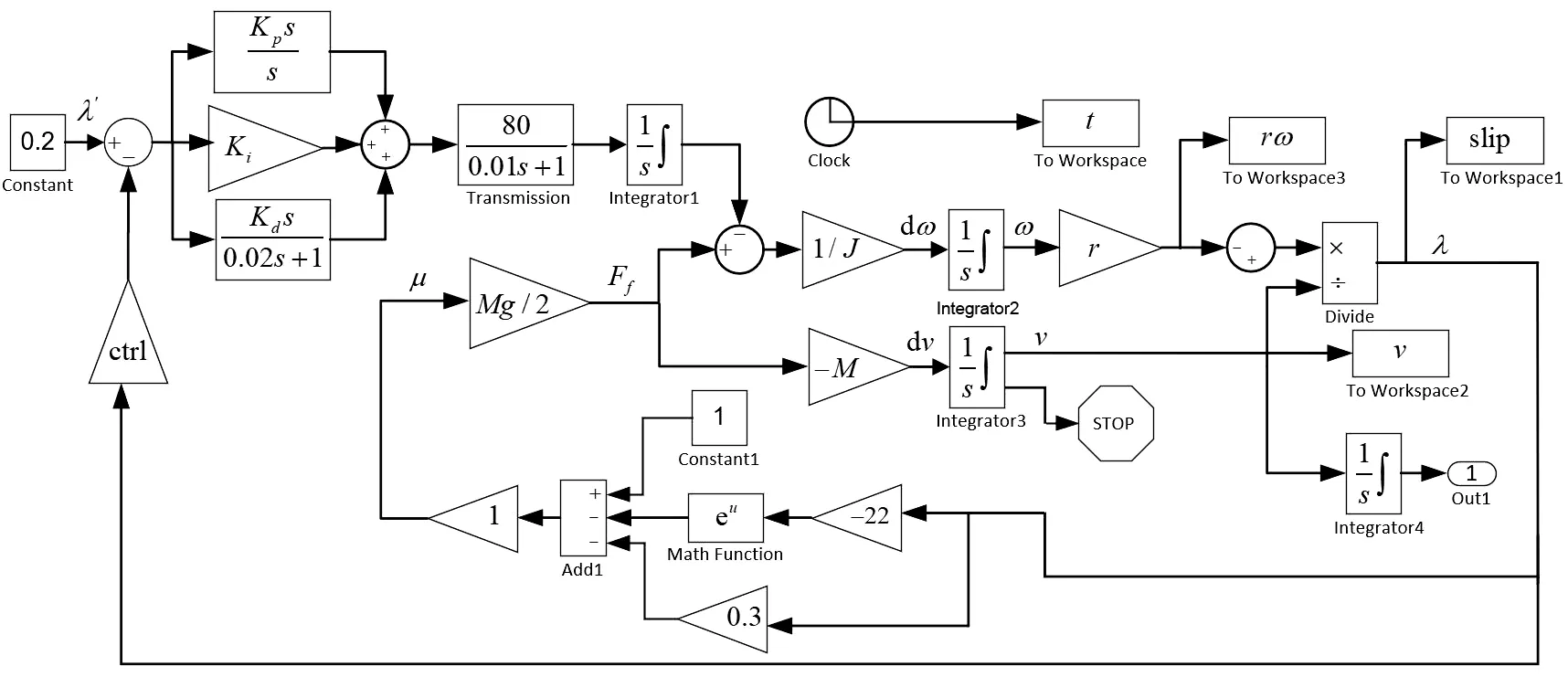
图4 电动自行车1/2轮胎模型的控制系统仿真模型
通过仿真实验可知,在不采用电动自行车辅助刹车系统时,电动自行车的制动情况见图5,在制动约0.5 s时,滑移率达到100%,车轮完全抱死。在第4.54 s时,电动自行车完全停止,制动距离为35.625 m。
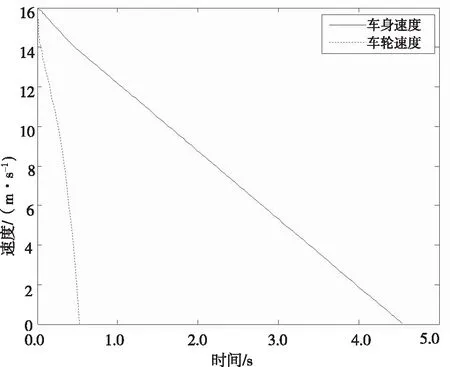
图5 无刹车辅助系统时车速与轮速对比
如图6所示,采用Chaos-AHPSO-PID控制的辅助刹车系统之后,车轮在制动过程中不会抱死,制动时间为3.65 s,制动距离为28.45 m。制动过程中的滑移率如图7所示,稳定在0.2左右。较之无刹车辅助系统的制动过程,制动时间缩短了0.89 s,制动距离缩短了7.175 m,很大程度上保障了骑行者的安全。
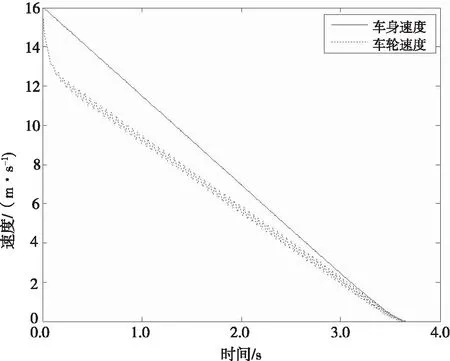
图6 有刹车辅助系统时车速与轮速对比
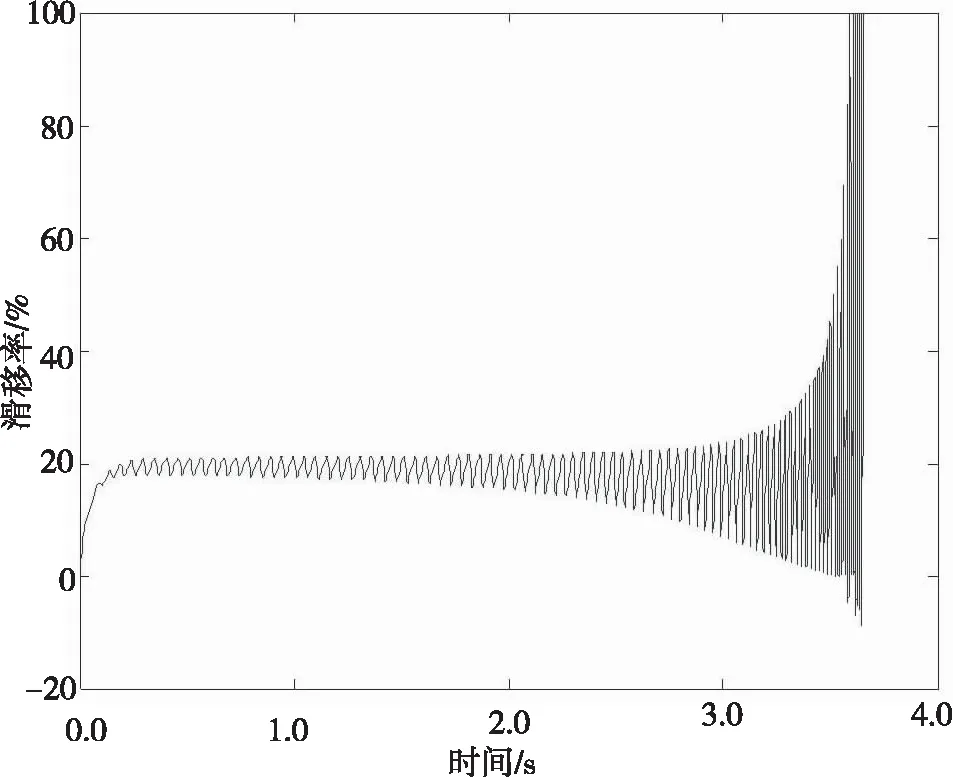
图7 Chaos-AHPSO-PID控制的滑移率
为了验证混沌自适应混合粒子群算法在电动自行车辅助刹车系统中整定PID控制器参数的有效性,分别采用标准粒子群算法、鲸鱼优化算法(Whale Optimization Algorithm,WOA)[5-6]、混沌自适应混合粒子群算法优化模型,进行对比实验。在优化过程中设置粒子的种群数量为10,迭代运算的次数Tmax。混沌自适应混合粒子群算法的ωs=0.8,ωe=0.2,b=4,c1和c2取值范围为[1.5,2.5]。分别运行上述3种优化算法10次,取优化结果的平均值如表1所示。
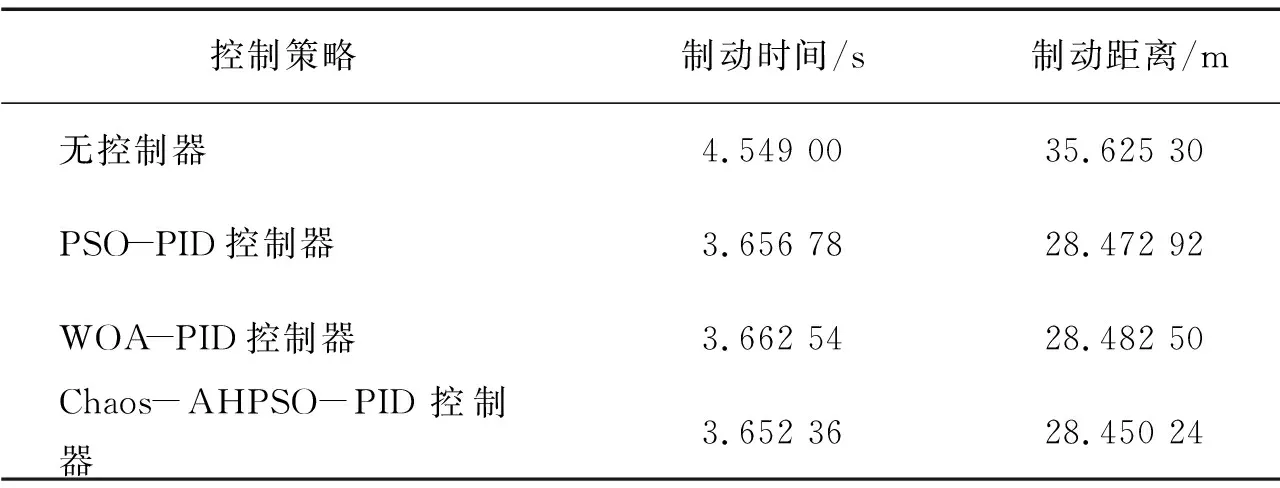
表1 不同控制策略的控制效果
混沌自适应混合粒子群算法的优化结果优于标准粒子群算法和鲸鱼优化算法。20次迭代运算过程中,标准粒子群算法与混沌自适应混合粒子群算法的种群最优适应度变化情况如图8所示,混沌机制、参数自适应机制以及随机搜索机制的引入,提升了标准粒子群算法寻优的精度与效率。
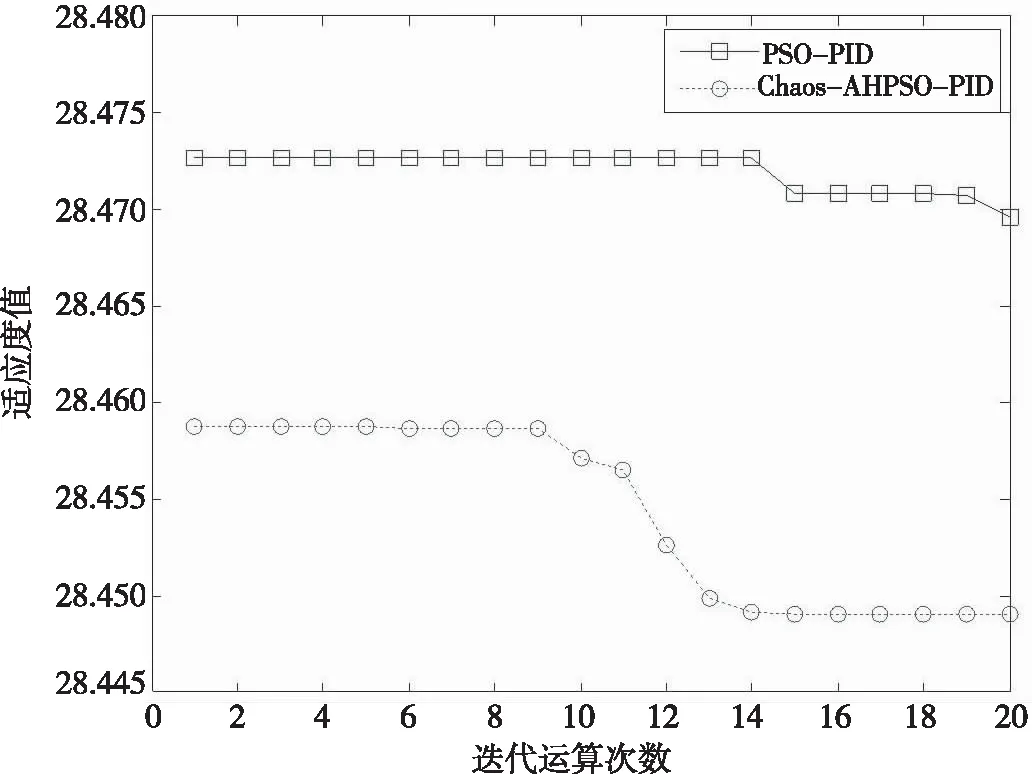
图8 算法适应度值对比
5 结语
电动自行车辅助刹车系统中,使用数字PID控制器,能够控制无刷直流电机的力矩调节电机的制动过程。系统的主要成本集中在软件开发,硬件成本较低,便于量化生产,具有很大的应用前景。在仿真实验中采用混沌自适应混合粒子群算法对PID控制器的参数进行优化,通过对比实验验证了该算法的有效性。在后续应用中,可以针对典型工况分别整定PID参数,将其存储到Flash ROM中,实现离线优化,在线调用,实时优化。
