临近空间探空飞艇能源系统仿真技术研究
2022-09-29赵彬涛于智航
王 焘,赵彬涛,于智航,周 强,胡 强
(1.中国极地研究中心,上海 200136;2.中国电子科技集团有限公司第十八研究所,天津 300384;3.中国电子科技集团有限公司第三十八研究所,安徽合肥 230088;4.北京临近空间飞艇技术开发有限公司,北京 100070)
极地区域地处地球两极,地面温度常年维持在0 ℃以下,恶劣的自然天气限制了常规侦查手段的长时间使用。但是极地区域,特别是北极区域,由于处在北半球区域,距离世界各个主要的经济体均较近,成为未来各国争抢的重点。极地区域临近空间的环境具有极昼现象,能够为临近空间飞艇等各种飞行器提供长时间的太阳能供给,确保临近空间飞行器长时间的滞空侦查,开发极地区域临近空间的探测侦查已经成为临近空间领域争夺的热点。
临近空间是指距离地面20~100 km 的空域,现有的飞行器,包括民航客机、军用战斗机、侦察机以及卫星,均无法长期滞留该区域。该空域距离地面较近,空气稀薄,是理想的高空侦查以及探测飞行器的活动区域。该空域的利用能够降低卫星承担的压力,特别是在区域探测的时候,能够极大地提升探测效率与探测精度,实时监控局部区域,避免卫星绕地环绕造成的探测空窗。
自2003 年美国空军正式提出临近空间的概念模型后,该区域已经成为世界各国作战能力建设的新方向[1]。传统的飞行器,如美国U-2 高空侦察机、全球鹰无人机、米格-25 高空截击机以及F22 猛禽战斗机等,均能够短时间到达临近空间区域,但是这些飞行器无法长时间滞空停留在该区域,无法充分利用临近空间空气稀薄以及阻力低的特点,实现临近空间侦查探测。
为了充分利用临近空间的空间优势,实现长时间、实时对地侦测,需要开发新型临近空间飞行器。临近空间距离地面较远,云层以及大气层对该区域的影响极小,这就造成了该区域空间的太阳能资源充足。丰富的太阳能资源能够为长时间滞空飞行器提供主要的能量来源,同时利用高比能量的储能电池,能够弥补夜间太阳能的匮乏,实现临近空间飞行器长航时、跨昼夜的飞行。
目前临近空间飞行器主要分为两类:临近空间太阳能无人机,临近空间飞艇。这两类飞行器均采用太阳能供电和储能供电的方式,为飞行器的飞行探测提供能量。为了提升临近空间飞行器的滞空时间,和侦测性能,飞行器在设计制造的过程中必须采用轻质高强度的碳纤维材料,同时临近空间飞行器的能源供给系统必须采用高转换效率的柔性三结砷化镓太阳电池以及高质量比能量的锂金属电池,以实现飞行器长航时侦测的目标。这些特殊材料以及产品的使用,造成临近空间飞行器的整体价格昂贵;而且利用临近空间飞行器真实平台进行各种试验时,试验样本少、成本高、耗时长,无法满足临近空间快速发展的需求。特别是临近空间飞行器的能源系统,是整个临近空间飞行器的整体动力来源,决定着整个飞行器能否实现跨昼夜飞行。目前能源系统产品更新换代速度较快,技术不断更新,但是临近空间飞行器的价格决定了能源系统无法实时进行真实环境验证,无法及时利用真实环境评估能源系统的整体性能。这就要求我们开发新的临近空间飞行器验证手段,快速评估临近空间飞行器用能源系统的可靠性。临近空间能源系统仿真平台技术能够模拟临近空间复杂的飞行环境,快速评估太阳电池和储能电池的特性,优化能源系统耦合匹配模型,提升临近空间能源系统的整体性能。
1 临近空间能源系统仿真平台技术
为了实现临近空间能源系统仿真平台的建立,首先需要完成能源系统仿真平台的仿真框架,确定仿真平台的仿真结构以及逻辑关系。建立临近空间飞行器能源系统组件模型,包括太阳能发电模型和储能耗电模型这两部分。通过仿真优化能源系统的拓扑结合和控制策略。同时为了提升仿真平台的可操作性,需要实现能源系统仿真平台的仿真数据可视化呈现,直观展示临近空间能源系统的整体运行情况,便于设计人员后续改进与提高。
1.1 临近空间能源系统仿真平台架构设计
临近空间仿真平台主要针对临近空间飞艇能源系统进行设计,主要包含太阳能发电模块、蓄电池储能模块、飞行器负载耗能模块和能源管理控制模块,同时为了真实模拟临近空间的低温低气压环境,在能源系统仿真平台架构设计上增加了辅助模块,包括位姿环境模块、热平衡模块以及飞行模型模块等,这些模块能够模拟临近空间飞艇在临近空间飞行时的周边气象环境、飞行器自身的姿态参数等。这些参数对临近空间飞艇的太阳能模块、储能模块以及控制模块具有一定的约束,通过使用这些辅助模块,能够更好地调控能源系统能量的供给分配,提升临近空间飞艇整体性能。临近空间飞艇能源系统仿真平台架构采用Matlab 进行编译,整体示意图如图1所示。
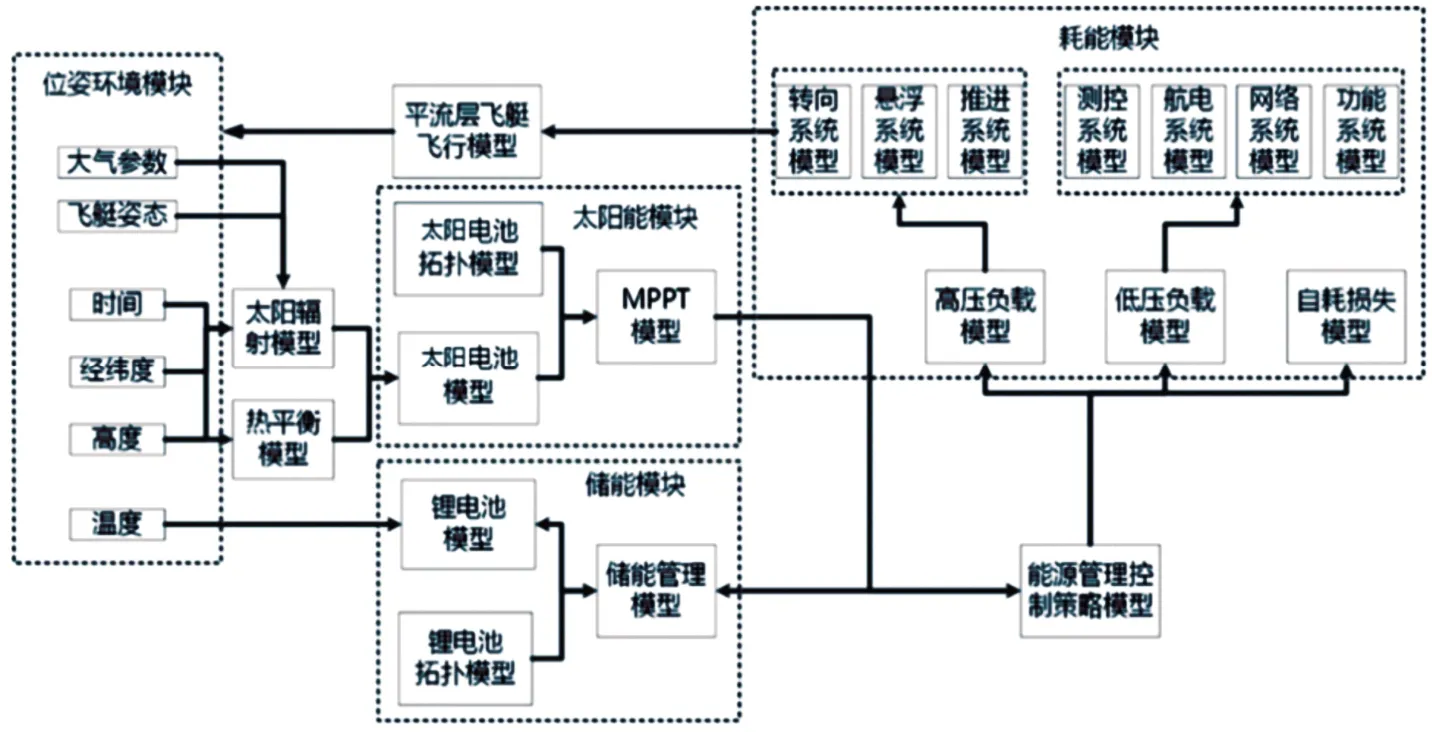
图1 临近空间能源系统仿真平台架构示意图
临近空间能源系统仿真平台的框架采用串并联交错的方式,整个框架各个模块之间相互联系。该仿真平台框架包含了临近空间飞艇运行过程中的耗能模块,包括抵押的通信、网络等负载,这些低压模块的用电功率较为稳定,模拟方法简单。但是对于高压负载模块,包括飞行器转向和推进系统等负载用电,自损耗较高,真实耗能需要结合螺旋桨以及电机等设备的实验数据,才能够准确获取能源系统的耗散数据。
在进行能源系统平台架构的设计时,为了提升仿真模型的实用性,采用仿真集成软件,将临近空间飞艇的运行轨迹、状态参数汇总,增添可视化界面进行展示,实现临近空间飞艇能源仿真数据的可视化。临近空间能源系统平台架构的可视化界面如图2 所示。
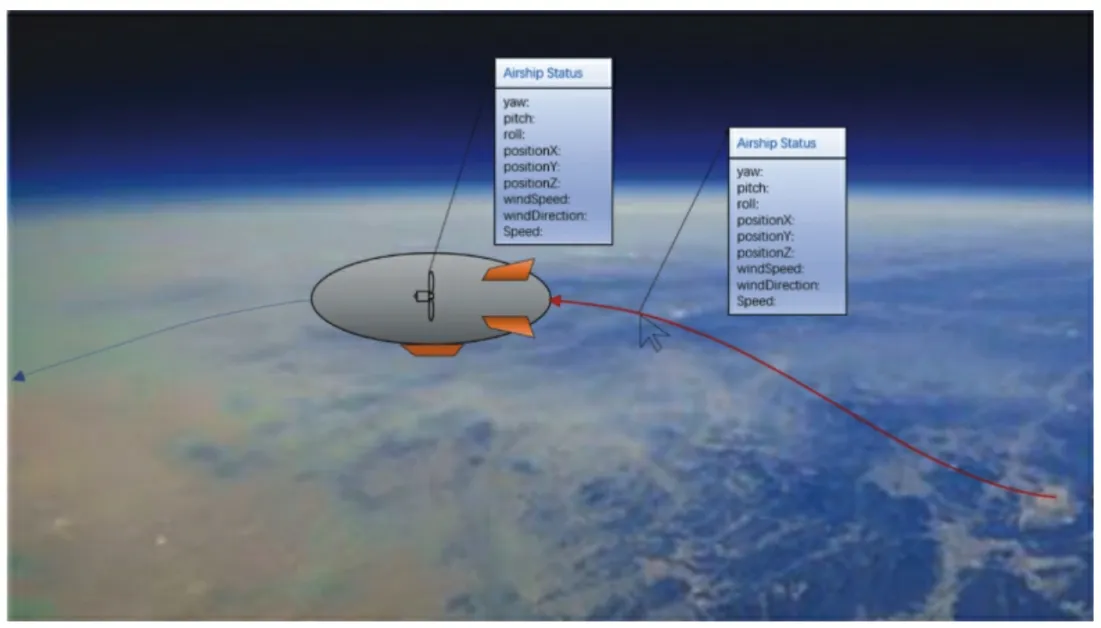
图2 能源系统仿真可视化界面
针对能源系统仿真平台开发的可视化界面包含了临近空间飞行器的飞行轨迹、预计的飞行路线等。在飞行器飞行路线上,包含有具体的飞行数据信息,包括飞行器的状态参数、飞行高度、飞行速度以及飞行经纬度等。临近空间飞行器的可视化界面详细参数示意图如图3 所示。该界面包含有临近空间飞行器的太阳能发电实时信息、蓄电池电量实时信息、飞行器动力系统的实时能耗信息以及能源管理控制策略信息等,通过点击对应的模块,能够快速查询对应的信息,及时掌握临近空间飞行的运行态势。

图3 能源系统仿真可视化界面参数示意图
1.2 临近空间飞行器能源系统关键部件建模
临近空间飞行器能源系统中,太阳电池供电、蓄电池储能以及能源系统的耦合匹配设计技术是整个电能源系统的核心,是决定飞行器能否正常飞行的关键。能源系统仿真建模过程中,针对太阳能能源获取模型、储能电池充放电模型以及能源系统耦合匹配技术进行设计,实现高效的能源系统能源供耗的预测。
1.2.1 太阳电池发电功能模型建模
针对太阳电池的能源获取特性,研究不同成组方式、安装方向角和高度角、不同飞行姿态以及不同太阳辐射强度下各个参数的影响因素,实现太阳能供电仿真模型的构建。
在太阳电池发电模型搭建的过程中,主要的影响因素包括日照强度和温度、太阳电池串并联模型等,通过数学模型的构建,实现临近空间飞行器用太阳能发电模型建立。
在日照强度和温度影响方面,主要考虑两者对太阳电池I-V 曲线的影响。假定地面上的日照强度S处在0~1 000 W/m2的范围内,在不同光强照射下,地面太阳电池的温度变化在10~70 ℃的大范围内变动。但是在临近空间环境下,太阳电池的温度受环境温度的影响较大,无法参照地面光照强度和太阳电池温度对太阳电池的I-V 曲线进行修正。为此我们假定在临近空间环境下某一时刻太阳电池的温度为T,此时日照强度为SNS,环境温度为TNS,采用如下公式对临近空间用太阳电池表面温度进行修正[2-4]:

式中:K通过试验测试T(S)斜率获取,本文采用的太阳电池,K=0.03 ℃·m2/W。在临近空间领域,需要对太阳电池实际发电情况进行修正[5]。
选取参考日的照射强度以及参考日电池温度下的电流电压曲线上的任意一点数据V和I,通过移动获取新的一天照射强度及温度下的I-V 曲线上的任一点V'和I'。
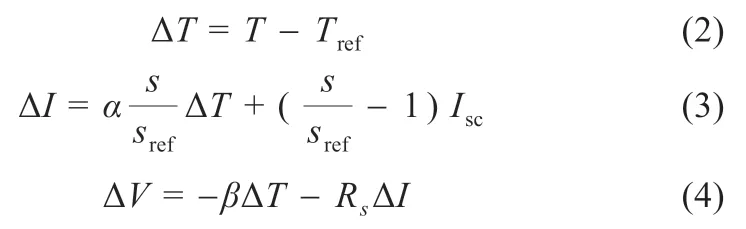

式中:α 为参考日照射强度的电流温度系数;β 为参考日照射强度的电压温度系数。
使用上述修正公式对标准电压-电流进行修正,获取新的电压电流曲线,如图4 所示。
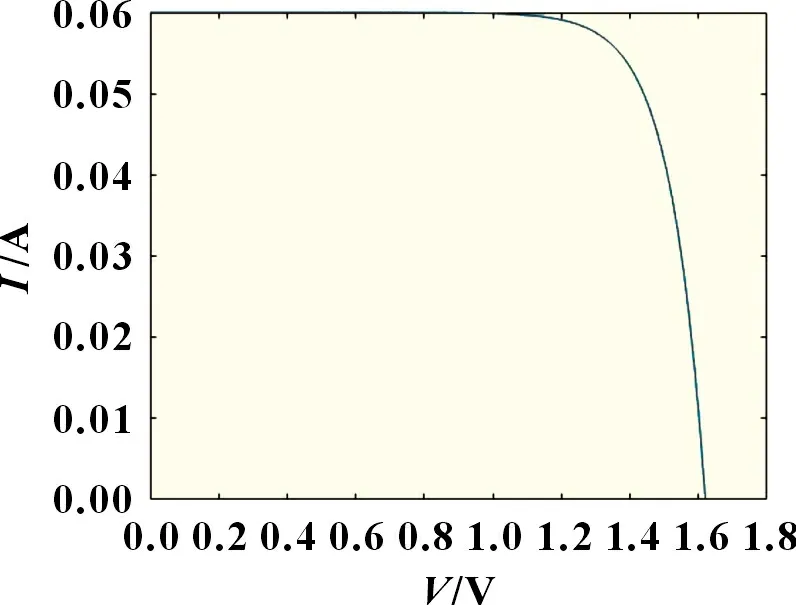
图4 单体太阳电池I-V曲线
临近空间飞行器用的太阳电池组件采用串并联方式实现,在计算太阳能组件总功率的时候,首先选取串流过程中的最小电流,并联选择最小的电压值,之后采用基尔霍夫定律计算总的太阳能组件功率。
在电池串联的过程中:
在太阳电池组件并联时:
根据以上串并联公式,通过计算获取单体太阳电池的电流和电压值,逐步获取太阳电池组件总的电流、电压和总功率值。
1.2.2 储能电池充放电模型
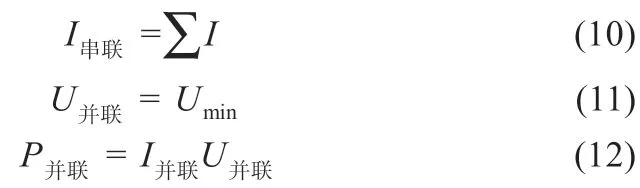
储能电池由于是动态模型,在实际应用过程中汇总,临近空间飞行器的能量输出以及荷电状态始终变化,同时电池循环次数的改变对整体储能电池也有一定的影响,导致储能电池的模型较为复杂[6-8]。目前常用的模拟方法包括电化学分析方法、电学模拟以及电路等效建模等。其中电化学分析方法最准确,但是这种建模方法极为复杂,内部的电化学方法建模较为困难,目前应用较少。电学模拟是以实验数据为基础的模型方法,这种方法依赖于大量的真实试验,耗时较长,使用受限。电路等效建模通过对电池端电压、充放电电流等电学参数建模,能够较好地反映储能电池的充放电过程,是目前最常用的一种试验方法。在电路等效模型中,二阶等效电路模型是储能电池中常用的一种方式,如图5 所示。图中:Voc(SOC)为电池开路电压,可以反映出电池电量情况;RSeries为电池欧姆内阻;U0反映电池功率损耗情况;R1和R2为极化内阻;Vout为电池外部负载电压;I为电池外部负载电量。
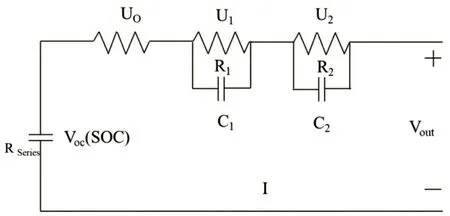
图5 二阶等效电路模型
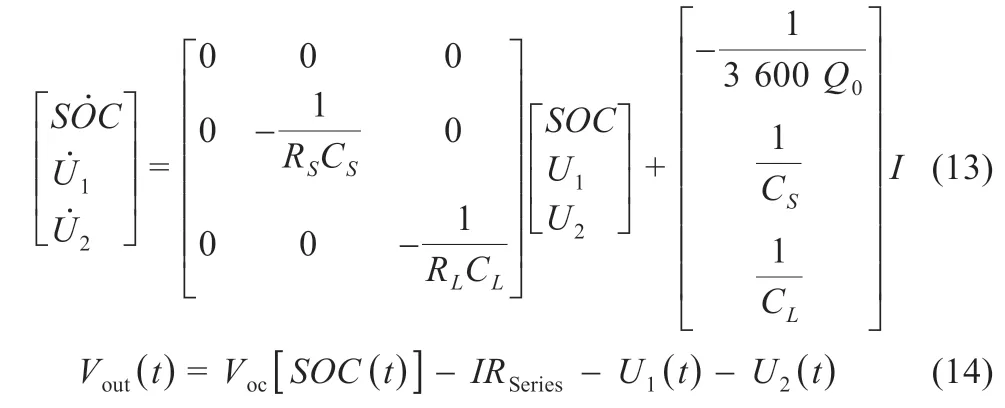
为了获取二阶等效电路模型中各个参数的值,采用二阶RC 模型的状态方程来获取。式中:U1(t)、U2(t)、SOC(t)分别为U1、U2、SOC在t时刻的值;Q0为电池的额定容量,Ah。
在该模型中,二阶RC 模型中的电压和电池的SOC有关,假定:

式中:Vnom为蓄电池SOC=1 时的名义电压,系数β通过测试某一电压V1下的SOC来确定。之后通过二阶等效电路模型,对电池进行充放电试验,获取电池的各个电压以及电流参数。
1.2.3 能源系统耦合匹配模型
在临近空间飞行器储能系统中,单体电池的电压和电流无法满足飞行器整体负载的需求,需要将单体储能电池通过串并联方式形成储能模组。在飞行过程中,临近空间飞行器的能量流动过程如图6 所示。
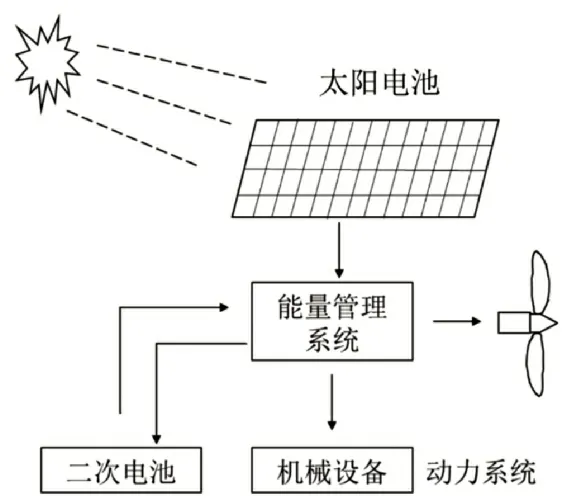
图6 临近空间飞行器能量流动示意图
在临近空间飞行器能源系统中,太阳电池和储能电池产生的能量分配给飞行器的负载,在飞行器工作过程中,整体能源系统的流动情况复杂,需要进行能量系统的耦合匹配,高效管理整体能量流动,实现临近空间飞行器长航时的目标。通过对临近空间飞行器飞行环境分析,基于太阳能供电模型和储能电池模型,设计出临近空间飞行器能源系统耦合匹配技术逻辑图,如图7 所示。
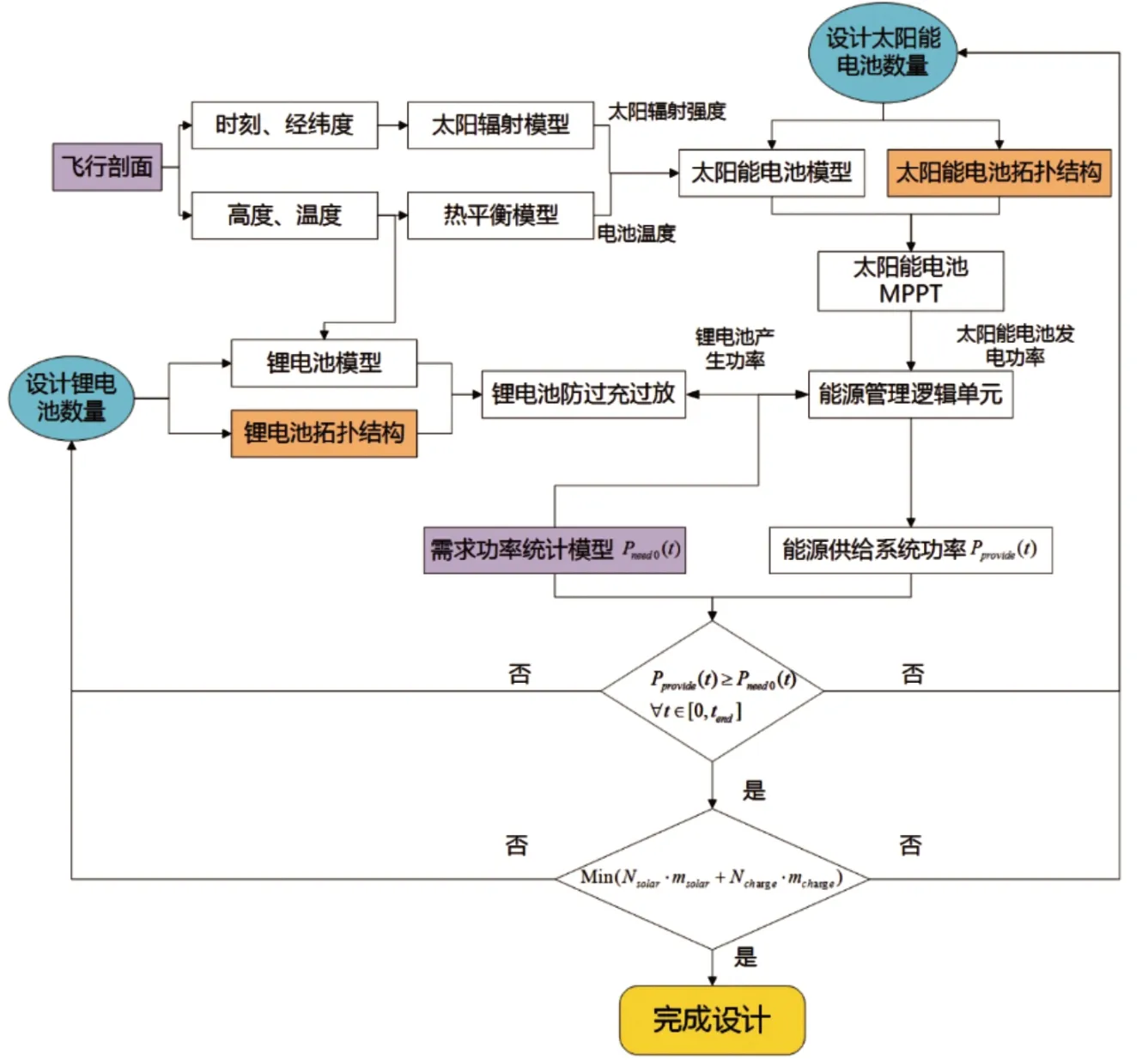
图7 临近空间能源系统耦合匹配逻辑示意图
在该逻辑图中,假定太阳电池与储能电池能够满足任意时刻临近空间飞行器负载的需要,并且储能电池模组不能过充和过放。在模型构建过程中,引入飞行器飞行坐标、周边温度信息等,实现临近空间飞行器能源系统动态耦合匹配。
2 临近空间飞艇能源系统仿真模型验证
为了验证临近空间能源系统仿真平台的有效性,采用实际试验与仿真结果进行对比,验证能源系统仿真的准确性,如图8 所示。
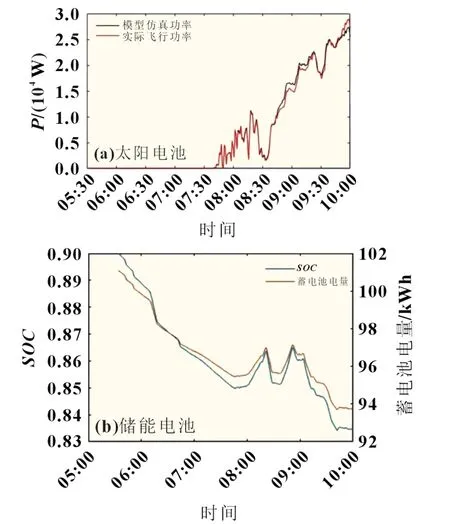
图8 能源系统模拟值与实际值对比
试验采用的是砷化镓电池,储能电池采用的是高性能锂离子电池,在能源系统仿真模型中,太阳电池的模拟值与实际值之间最大偏差在10%左右,锂离子电池组SOC估算值与实际值最大偏差在1%以内,表明临近空间能源系统仿真模型具有较好的预测效果,能够替代部分后期临近空间飞艇的实际工况试验,加速临近空间飞艇能源系统的优化升级。
3 结论
临近空间能源系统模拟仿真平台是快速评测临近空间能源系统有效性、快速提出改进方向、降低能源系统开发难度的有效手段。
通过对临近空间能源系统中太阳电池与储能电池实际发电与耗电情况的仿真,实现了快速评测临近空间飞艇能源系统的目标,为临近空间能源系统的快速优化提供了可靠的试验保证,降低了临近空间飞艇试验的成本和难度,为临近空间飞艇的快速发展奠定了能源保障基础。
