一种异常行程时间数据处理算法
2022-09-28王浩,田恒
王 浩,田 恒
(上海应用技术大学 计算机科学与信息工程学院,上海 201418)
0 引言
行程时间作为一项重要的交通流参数,在评价交叉口配时策略[1]、出行策略[2-4]、行程时间预测[5-8]等方面起着重要作用。随着城市交通压力的加大,低精度检测装置与低精度计算方法已不再适用于当今复杂的交通路网。在道路系统中,环形线圈检测器[8]主要获取交通量与车速等数据,但用于计算行程时间时,准确率不足。Global Position System (GPS)的广泛安装给行程时间的获得提供了可能,例如公交系统[9]、滴滴出行[3]、浮动车[10-11]等,但由于行业的差异,数据无法共享,且不全面,并不能全面反映交通状况。手机信令[7]数据样本量充足,但数据源杂乱,除了机动车本身产生的数据外,行人和非机动车产生的数据会产生干扰。电子警察作为专业的交通检测装置,所检测的数据不仅全面,且准确率高,在智能交通领域有着广泛的应用,例如:交通流预测[12]、交通事故检测[13]、车速预测[14]等。
虽然电子警察准确率很高,但由于短时停车、超车等特殊因素的存在,会对行程时间的准确计算产生干扰,不能得到准确的行程时间。为解决上述问题,建立了从原始数据提取、简单异常数据处理到复杂异常数据处理的完整解决方案。
1 电子警察数据
1.1 原始数据获取方法与内容
高清数字摄像机拍摄的图像信息是电子警察数据的来源。如图1所示,当车辆驶过停车线PLA1时,摄像机1会捕捉其尾部车牌信息并形成1条过车数据,存入记录表(表1),当车辆驶过停车线PLA2时,摄像机2也会捕捉其尾部车牌信息并形成1条过车数据,存入表1。
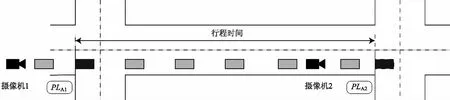
图1 行程时间定义与电子警察数据来源Fig.1 Definition of travel time and source of electronic police

表1 记录表Tab.1 Recording table
为方便起见,给路网上的路段分配唯一编号。在表1中,TIME_STAMP为摄像头拍摄车牌的时间,也是该车尾部经过停车线的时间;LINKID为被拍车辆所行驶的路段编号(统一规定为A-X);PLATENO为被拍车辆的车牌信息(为保护隐私,隐藏部分信息);LGID(A-X-B-Y)为车道组编号,其前一部分(A-X)为该车离开的路段,后一部分(B-Y)为该车即将进入的路段,例如表1第1条数据表示:车辆“苏E2$L1B”在“2018/10/5 0:01:22”离开路段“203-3”,之后进入路段“191-1”。
1.2 路段行程时间提取
若同一车辆通过相邻交叉口并均被成功记录,将2次记录时间相减即可得到该车通过2个交叉口之间路段的行程时间。具体做法如下:以路段和车牌号为关键字,对表1进行查找和匹配,就可得到该车经过2条停车线的时间,这2个时间差就是所定义的行程时间。整理后,可以得到包含所有车辆在某路段的匹配表(表2),其中TRAVELTIME为行程时间。
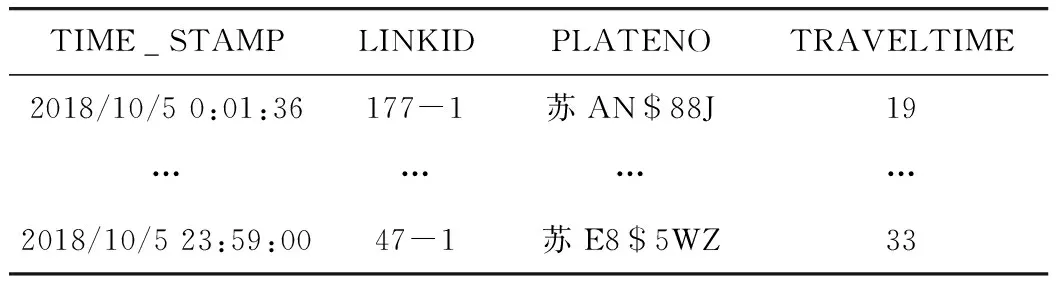
表2 匹配表Tab.2 Matching table
2 行程时间特性分析
将对路段行程时间特性的分析,作为数据处理的理论基础。
2.1 周期性
根据前述数据获取方法,电子警察仅在绿灯期间产生记录。在匹配表中,对于一个路段,以记录时间为横坐标,行程时间为纵坐标,绘制坐标系(如图2所示)。可以发现,行程时间-时间图呈周期分布。

图2 行程时间-时间图Fig.2 Travel-time time figure
图2中,只有在绿灯时间才有车辆通过,形成1个记录点,符合实际情况。
2.2 单调不增性
把路段看作1个队列,车辆往往服从“先进先出”原则。在不考虑短时停车与超车等行为的理想情况下,由于绿灯排放的原因,往往先进入路段的车辆等待红灯时间依次减少,所以在1个周期内,行程时间呈现单调不增的趋势,并最终达到自由行程时间(没有延误)。
3 仿真验证
为验证路段行程时间的周期性与单调不增性,使用SUMO微观仿真平台进行仿真验证。
3.1 SUMO仿真软件
SUMO作为一款开源的、微观的交通仿真软件,已被广泛使用[15-17]。为简化仿真试验,以SUMO自带的瞬时感应线圈检测器(Instant Induction Loop,IIL)代替高清摄像头,并把IIL设置在停车线附近,以达到和高清摄像头相同的效果。IIL可以检测所有通过的车辆,并输出相关参数,部分参数见表3。

表3 输出参数Tab.3 Output parameters
其中,vehID为所过车辆的编号。当车辆经过IIL时,IIL会检测该车的运行状态(state),分别是刚刚进入检测器(enter)、持续被检测(stay)和完全离开检测器(leave)3种状态,并记录当前状态的时间(time),最后输出XML文件。为了模拟电子警察的检测机制(当车辆经过停车线时,拍摄车尾车牌),以leave状态为摄像头的记录时间。
3.2 仿真环境搭建与结果
为模拟实际交通流,设置了如图3所示的三交叉口路网,其中A点产生车辆,在交叉口2和交叉口3设置如图4所示的检测器a和b。在20 min内,给路网中输入20 veh数据,最后得到包含所有检测器检测信息的XML文件。

图3 仿真路网与检测器安装位置Fig.3 Simulated road network and installation positions of detectors
3.3 行程时间提取
提取XML文件中的关键信息,计算行程时间,并生成匹配表,最后可视化行程时间。在宏观上可明显看出行程时间-时间图呈周期性分布与单调不增分布,如图4所示。

图4 行程时间-时间图(部分仿真结果)Fig.4 Travel-time time figure (partial simulation result)
3.4 小结
试验结果表明,在1个绿灯时间内或周期内,行程时间确实呈单调不增分布,整体行程时间-时间图呈周期性分布。
4 异常数据提取算法(OSPVP算法)
4.1 算法原理
根据上述理论分析与仿真验证,在1个周期内,车辆在路段的行程时间呈单调不增分布。以1个周期为例,如图5所示,主要有2种异常点,第1种在微观行程时间图的表现为“凸起”,比其周围的行程时间要大,可能是短时停车所造成的; 第2种在微观行程时间图的表现为“凹陷”,比其周围的行程时间要小,可能是超车所造成的。

图5 案例分析Fig.5 Case analysis
在实际交通状况中,车速存在波动,行程时间也会出现波动,所以并不服从严格的单调不增。为提取满足上述分析的目标点,提出了超车车辆与短时停车提取(Overtaking and Short-term Parking Vehicles Pursuing, OSPVP)算法,其中“凸点”判断原理如图6(a)所示,以d作为阈值,其中,A和B为车辆记录点,d1为两点之间的行程时间差异(正),如果d1>d,则B点为第1种异常点;“凹点”判断原理如图6(b)所示,以r作为阈值,其中,C,D,E为车辆记录点,d2为D与C之间的差异(负),d3为D与E之间的差异(正),如果d2<-r,且d3>r,则可判断D点为第2种异常点。

图6 OSPVP算法原理Fig.6 Principle of OSPVP algorithm
4.2 案例验证
通过匹配表提取案例中20 veh在路段上游和下游的过车时间,以下游过车时间顺序编号(表4),其中车辆6与车辆15为异常数据。

表4 案例车辆在该路段上下游过车时间Tab.4 Passing time of vehicles in upstream and downstream of road section in example

续表4
在表4中,车辆6比车辆5早28 s经过上游,但却比车辆5只晚4 s经过下游,车辆6可能进行了短时停车;车辆15比车辆16,17,18晚经过上游,却早经过下游,说明其可能进行了超车。通过实际数据比较,验证了算法的有效性。
5 实际运用
5.1 数据来源与异常数据处理
数据来源于苏州工业园区电子警察系统,选取星湖街上1个路段(现代大道与苏州大道东之间)为研究对象,从数据库中查询该路段(南-北方向)上下游1 d的电子警察过车数据,按照第2部分的方法对数据进行处理,整理得到该路段南北方向所有直行车辆的匹配表,总共5 262条数据。该路段长度为260 m,行程时间不会很长,去掉那些在该路段行程时间超过5 min的车辆(离开路段或长时间停车)。
5.2 数据切片与整理
从匹配表中直接提取数据,所得到的行程时间-时间图包含1 d的数据,为研究行程时间的微观特性,以行程时间-时间图的周期性,对其进行切片(原理如图7所示)处理,把本来宏观的行程时间-时间图分开,得到微观行程时间图。依据红灯的“截流”特性,在红灯时,没有过车数据;绿灯时,有过车数据,通过车头时距[18]得到微观行程时间图。由于数据来源为全天的数据,而低交通量并不是研究的重点,选择交通量大于10的微观行程时间图,共得到211组微观行程时间图。
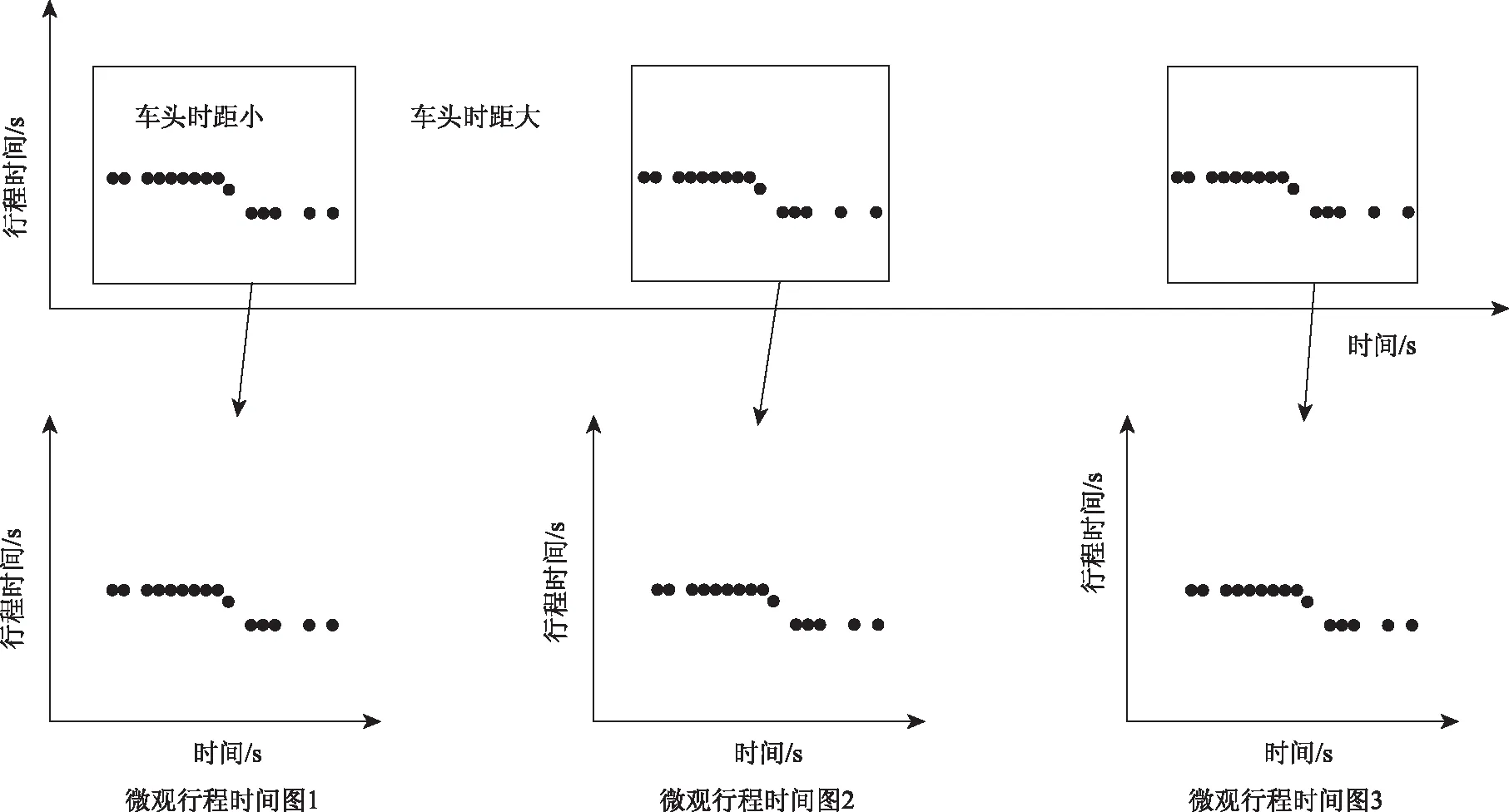
图7 切片过程Fig.7 Cutting process
5.3 异常数据提取
采用OSPVP算法对上述获得的211组数据进行异常数据提取。为简化算法,通过观察试验结果,发现d=r=15 s时,取得不错的效果,部分结果如图8所示,且印证了行程时间的单调不增性。

图8 部分结果Fig.8 Partial result
最终211组数据中异常数据提取结果如图9所示。
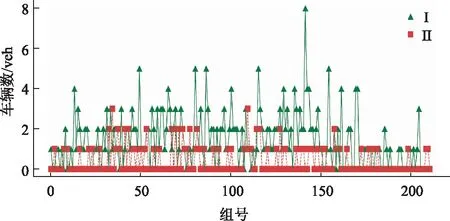
图9 异常数据提取结果Fig.9 Abnomal data extraction result
可以发现,I类异常点较多,II类异常点较少。结合路段实际位置分析,造成I类点的原因往往是短时停车,此路段位于工业区,人员流动较大,符合情况。
6 结论
行程时间的准确性是后续各种研究的基础。在理想状态下,分析并仿真验证了路段行程时间在宏观上呈周期性分布,微观上呈单调不增分布,为异常数据处理提供了理论依据。在实际运用中,首先,根据路段的长度,去掉长时间停车或长时间离开路段的车辆。然后,基于电子警察数据与相关特性,在周期层面提出了OSPVP算法,为行程时间的准确计算提供了完整的解决方案。OSPVP算法不仅可以提取电子警察异常数据,也可以为其他来源异常数据处理提供参考。
后续工作主要围绕两个方向展开。一是基于准确的行程时间开展相关研究,二是分析2种异常点与短时停车、超车的关系。
