建筑复杂构件3D打印的传统工艺技术优化设计
2022-09-28李森萍冯建行
李森萍,冯建行
(广东碧桂园职业学院,广东 清远 511510)
随着我国3D打印技术的发展,在各个领域得到了广泛运用。但简单的3D打印技术具有局域性,在很多方面受到了限制。特别是将3D打印技术运用在建筑构件打印时,受3D打印技术局域性影响,只能完成简单构件的打印,对于一些复杂构件的打印确是有心无力。因此,对3D打印在建筑行业的创新是现在很有必要的一个研究课题。从施工工艺出发,希望通过优化混凝土3D打印施工工艺,对混凝土构件打印过程进行优化;从混凝土3D打印材料出发,从材料配合比、可打印性、可建造性、使用性能和工程应用5个方面探讨了3D打印纤维混凝土存在的问题和发展趋势;从结构出发,证实3D打印结构柱与普通钢筋混凝土柱的破坏模式类似,但承载力降低10%~20%,跨中最大挠度随着偏心距的增大其增幅略微增大。基于此,本文尝试通过数据建模与3D打印技术集合,设计并制造了转臂式混凝土3D打印机,对复杂混凝土构件进行分割,然后分步进行打印,完成复杂混凝土构件的3D打印。
1 混凝土构件建模打印基本工作流程
混凝土构建建模主要包括建模、参数优化、切片处理和路径规划以及打印成型。建模是根据不同模型特点,选择适合的三维建模工具,根据打印构件要求建立精准三维模型。模型的参数优化主要是对打印机工艺参数进行优化。主要从设备和材料方面探究工艺参数对模型产生的影响,通过打印机特点优化三维模型;对打印参数进行设置,可实现打印成型目标,对构件质量进行提高。切片处理和路径规划是对优化后的三维模型进行转化、切片。然后规划层片信息的打印路径,生成G代码。打印成型是把切片后G代码导入打印机的控制器,调整打印机位置,待供应打印材料后,启动打印机。
具体工作流程如图1所示。

图1 混凝土构件建模打印工作流程图
2 三维模型建立
2.1 三维模型软件选择
本文选择AutoCAD软件为三维建模软件。该软件能够将三维实体模型导出STL文件格式,对数据转换过程起简化作用;具体如图2所示。
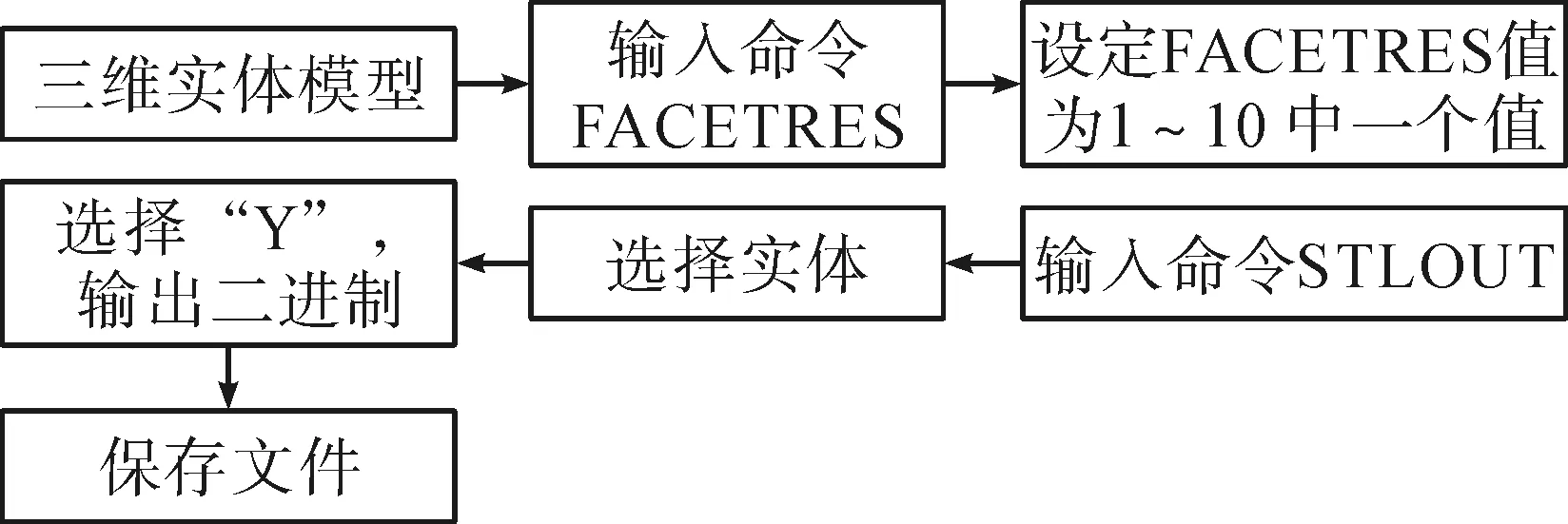
图2 AutoCAD软件导出STL文件格式方法
2.2 三维模型建立
本文以某小礼堂作为原型建立三维模型。该模型墙体为圆弧形,屋顶为苍穹状。通过 Sketchup软件绘制出草图后,用AutoCAD软件同比缩小其比例,建立精确的缩尺三维模型;具体模型如图3所示。
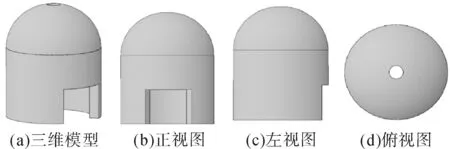
图3 小礼堂CAD图
3 参数优化
3.1 新型转臂式3D打印机设计
新型转臂式3D打印机主要包括控制系统、运动机构和送料系统3个部分。运动机构由一根竖直立柱和一根悬臂、三台电机构成。电机对竖直立柱起牵引作用,使之进行转动;竖直丝杆牵引悬臂梁沿竖直立柱上下转动;抖斗安装在悬梁臂上,在梁上轨道进行移动。送料主要有混凝土输送泵、输送管、带喷头料斗、电机。在料斗上方安装电机,对喷头出料速度进行控制;螺栓连接打印喷头和料斗,根据需求更换不同内径的喷头。控制系统主要包括DH3型伺服驱动器中智能功率模块,以及2500线增量编码器。具体打印原理示意图,如图4所示。
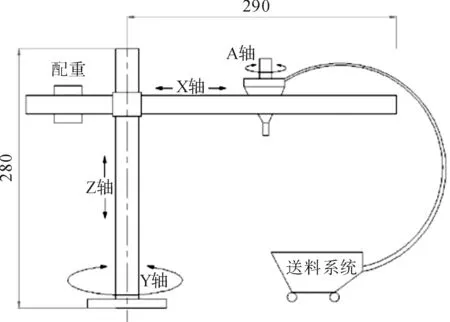
图4 转臂式打印机原理图
3.2 复杂构件优化设计
受目前3D打印技术限制,无法完成结构复杂尺寸较大的物件,因此需要对构件模型进行分割。按照特定算法分割复杂构件模型,使之成为若干个形状简单,尺寸小的块状,通过打印机打印后,在根据规律将其进行组装。本文选择基于蜂窝单元的内部结构优化算法优化模型分割。应力分布由有限元分析得到,密度函数定义和内部单元划分通过应力分布结果定义,目标是强度质量比最大值,得到最大空化参数。该分割方法具有耗材少、强度高的特点;具体结构支撑如图5所示。

图5 内部蜂窝状结构支撑
3.3 打印路径优化
本文主要选择蚁群算法对3D打印机打印路径进行优化。
蚁群算法基本原理
设蚁群算法蚂蚁数,待访问节点数为,节点间的距离为(,=1,2,…,),在时刻节点与连接路径上信息素浓度为,()。设初始节点间具备相同信息浓度,则,(0)=。
访问城市由蚂蚁(=1,2,…,)通过节点间连接路径上信息浓度决定。时刻,蚂蚁从节点转移至节点概率表达式为:

(1)
式中,,()表示启发函数;,()=1,,表示蚂蚁节点转移到节点的期望程度;(=1,2,…,)表示蚂蚁下一个可能访问的节点集合;ɑ表示信息素重要程度因子;表示启发函数重要程度因子。
在蚂蚁转移时,蚂蚁释放信息素,节点间连接路径上的信息素慢慢的消失。当全部蚂蚁进行一次循环后,调整路径上各信息素浓度,则+时刻节点与节点连接路径上信息素量可调整为:
,(+)=(1-),()+,(,+)
(2)

(3)

本文选择Ant-Cycle 模型求解蚂蚁释放信息素,其表达式为:

(4)
式中:为信息素强度;为蚂蚁在该循环中路径总长度。
路径规划算法实现步骤
(1)参数初始化。初始化相关参数,量节点间距离通过节点坐标位置计算,得到对称距离矩阵;因为启发函数,()=1,,为避免分母为0,在对角线上的0赋予较小正数;
(2)解空间构建。在不同节点投放不同蚂蚁,蚂蚁(=1,2,…,)通过转移概率公式确定下一个带访问节点,待所有蚂蚁访问完所有节点后,完成一组路径构造;
(3)信息素更新,最优解记录。计算一个蚂蚁所走路径总长(=1,2,…,),通过对每个城市路径信息素浓度进行调整更新,得到最短路径;
(4)判断终止情况。当迭代次数最大,则终止计算,输出最优解。若达不到最优解则需要返回第2步。
3.4 模型数据切片处理
适应性分层切片算法
适应性分层切片算法对台阶效应有减小作用,对加工时间不会增加,但无法去除台阶效应的影响。STL模型的几何特征决定适应性切片厚度,打印试件存在明显轮廓变化时,所需厚度小;反之,则所需厚度大。适应性层厚切片的评价指标为切片形成的相邻两层面的面积变化比,当相邻两层开面的面积变化比大于预设值,则需适当按照比例切片厚度,重新切片,切片厚度最小即可;具体流程如图6所示。

图6 适应性分层切片算法流程
设第层层面截面面积为,上一层面积为-1;面积变化比的预设值为,则需要满足式(5),切片结束。若不满足式(5),则需要减小切片厚度重新进行切片。
(5)
层片数据处理——路径规划
模型打印质量、强度、刚度和成型效率直接受打印路径的影响,因此需要对打印路径进行规划。一般来说,打印路径规划主要是对外部轮廓和内部填充路径进行规划。规划打印路径,能避免打印路径的交叉和重叠现象,还能够减少打印路径过程的拐角数量,这样就避免了在打印时方向和速度突变情况。
切片处理软件介绍
本文选择的切片处理软件为Cura。该切片软件具有切片速度快、切片稳定、包容性强和设置参数少等优点。该软件主要包括模型处理、G代码生成以及切片。默认层厚为0.1 mm,层数为模型高度/层厚。载入模型后,软件开始切片和计算打印需要的时间、耗材质量和耗材的长度,在软件视图区右上角位置进行显示。切片轮廓和路径使用不同颜色进行标识。改变模型模式时,Cura软件重新进行切片。
4 应用实例
某圆形管状结构内径50 cm,外径80 cm,壁厚15 cm,高15 cm。因其特殊结构,不能用浇筑成型,故使用混凝土3D打印技术建造。具体步骤为:
(1)对模型进行分层切片处理,分为层厚为15 mm的10层。对分层后模型内进行层片信息处理;
(2)平面模型线条为3 cm,可满足转臂式3D打印机工作需求,可采用单线条打印。提前描述平面模型,求出格栅小方格中心点坐标,一共276节点,以此来规划打印路径;
(3)采用基于蚁群算法的完全遍历路径规划算法提前规划其最短路径。经过计算可知,该模型最短路径为7 699.135 6 mm,经过320次迭代后,得到最优解;
(4)按照算法路径对规划路径进行调整,调整后路径为最优路径,喷头不出现空转跳跃情况。但拐角多,频繁转弯导致打印机稳定性减小;
(5)将最佳打印路径生成G代码,导入3D打印机后开始进行打印。为保证成型质量,再次对最佳路径进行调整,先打印出内外2个圆弧,然后打印内部支撑结构。经过调整后,喷头路径总长度为7 790 mm且存在一次跳跃。打印后成品如图7所示。打印构件整体未见明显缺陷,证实该3D打印机可行。

图7 打印成型效果
5 结语
本文通过建模、参数优化、切片处理和路径规划以及打印成型等方面对复杂造型混凝土构件打印成型进一步优化,具体结论为:
(1)选择AutoCAD软件为三维建模软件,在格栅地图描述平面模型。通过节点的计算规划其最优路径;
(2)设计并制造了转臂式混凝土3D打印机,设置模型时,提前用Cura软件对其路径进行切片规划,然后采用基于蚁群算法的完全遍历路径规划算法规划其最短路径;
(3)将最短路径进行转化,生成G代码,导入3D打印机后开始进行打印。打印构件整体未见明显缺陷,证实该3D打印技术可行。