分布式驱动电动汽车关键技术分析
2022-09-28袁所贤
0 引言
据调查研究显示,截止2021年,我们国家汽车保有量已经达到3.95亿辆,其中汽车3.02亿辆,机动车驾驶人已经达到4.81亿人,并且呈现出持续上涨的趋势,由此可以看出我们国家汽车产业的发展非常快,汽车给人们的出行带来了一定的便捷,但是也带来了一些问题,比如能源消耗大、环境污染严重等,就拿环境污染来说,其中最典型的就是汽车尾气污染,它对城市空气质量有着非常严重的影响,比如北京市的PM2.5中汽车尾气的贡献率达到了22.2%,是造成城市雾霾的主要因素之一。
1 分布式驱动电动汽车概述
所有的电动汽车都是由电源和电动机为驱动力,涉及到机械、工业、电子设备等各个学科的内容。按照不同的标准,电动车能够分成不同的类型,根据电动车能量的来源,可以将电动汽车分为BEV、PHEV、FCEV等;根据电动车的驱动系统结构布置方式,主要可以分为集中式电动车和分布式电动车,所谓的集中式电动车就是用电动机取代传统的内燃机,主要是单轴驱动,整个驱动系统与传统驱动系统相比,改动比较小,电动机的布置方式也更加灵活,逐渐出现分布式驱动电动汽车。分布式驱动电动汽车有4个电机,放置在汽车的4个角,在汽车后面2个角安装了减速器,并且分别安装了4个电机控制器,电池组主要包括燃料电池+DC/DC+氢罐。
1.1 分布式驱动电动汽车的优势
与传统集中驱动式电动汽车相比,分布式电动汽车最明显的特征就是汽车的各个车轮能够实现单独驱动,从而能够有效降低驱动故障的频率。分布式电动汽车的优势主要体现在以下几个方面:
依托乡土体育资源开展的阳光体育活动,改变了以往学生疲于应付,被动活动的局面,变“要我运动”为“我要运动”,使学生在文明和谐的氛围中陶冶情操,锻炼身体,让学生转瞬即逝的青春留下照亮终生的火花,让学生的人生充满了阳光,使他们无论是处于顺境还是逆境,都能乐观而不消极。
1.1.1 提升汽车主动安全控制的精确性
传统汽车的主动安全控制都是依靠驱动或者制动车轮的方式进行,一般来说都是通过改变汽车的受力情况来改善汽车的动力学特性。而分布式驱动电动汽车都是以电机为动力源,电机不仅能够给汽车制动,而且还能回收动能,这有利于提升分布式驱动电动汽车的制动效果。还有电机具有精确度高、响应时间快的特点,因此,驾驶人可以通过电机的反馈来了解整个车辆的受力情况,对于汽车进行干预,从而能够更好的调整车辆的运行状态。
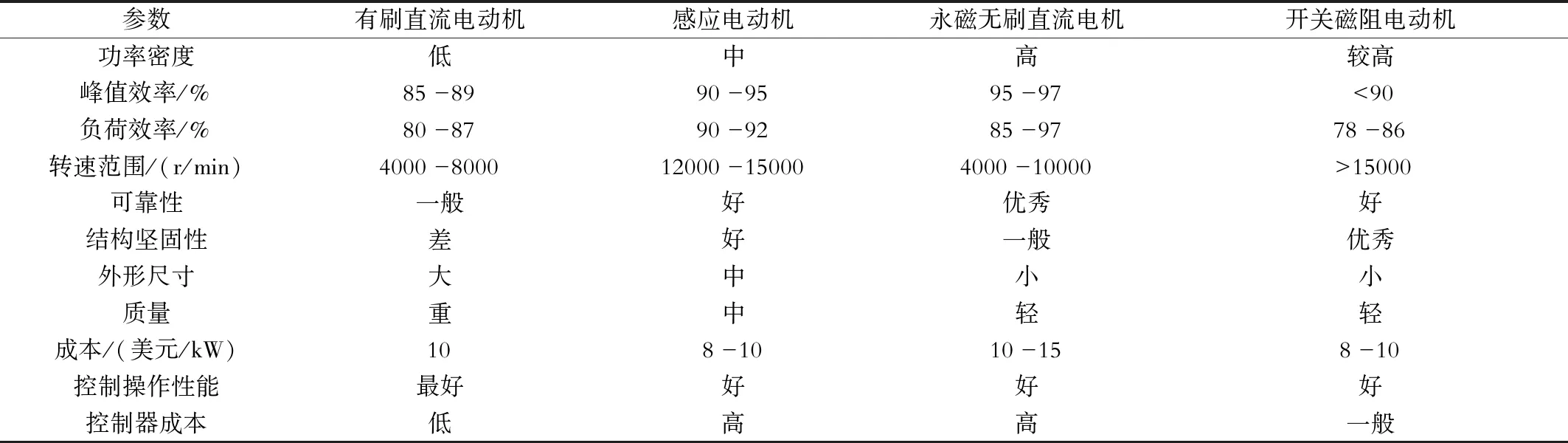
首先,电动汽车的电机能否适汽车的行驶状况,比如汽车启动、汽车加速、汽车减速等,目前常见的电动车驱动电动电机的基本性能比较如表2所示:
1.1.2 有利于提升车辆底盘布置的灵活性
分布式驱动电动汽车结构系统里没有发动机、传动轴等,而是用电机、电机控制器来代替,因此,技术人员可以根据具体的需要灵活布置电气零部件。还有分布式驱动电动汽车都是用电机进行驱动,这有利于增强汽车动力传输的集成度,为电气零部件的灵活设置提供了可能。还有技术人员通过调整电气零部件在汽车车身中的位置,以此来改善分布式驱动电动车的受力状况和动态特性。
分布式驱动电动汽车的主要动力源是电机,电池主要负责储存能量,电机的质量直接决定着汽车的动力性能,电池决定的电动汽车的续航集成,因此,毫不夸张的说,电机和电池是整个电动汽车的核心。
护理结束后,观察组患者的护理总有效率为临96.43%,而对照组护理总有效率为64.29%,差异有统计学意义(x2=4.141,P<0.05),组间差异明显,差异有统计学意义。见表1。
由表5可知,长大纵坡试验段沥青路面施工完成3年后车辙深度平均值为2.38mm,路面车辙深度较小,说明路面抵抗车辙的性能较好,优化后的试验段长大纵坡沥青路面施工技术取得良好施工效果。
1.1.4 精准控制汽车的每一个车轮
教育在淳化镇乡村社会中,是不很发达的,大半学校多系私塾,俗名叫做“蒙馆”,就是在一个乡村中的农人,他们互相联合起来,大家摊派几个钱,请一位能教四书五经的老先生,来教学生读古书。在淳化镇乡村社会里56村中,共有34村有了这种私塾,占全体村数中51.8%,什么新式小学倒反很少。近年江宁县政府及私人方面极力提倡,到了现在,总算共有5个村庄已经设立,但亦仅占全体7.1%。[25]
1.1.5 提升汽车运行的稳定性
分布式驱动电动车的每一个车轮都能够被单独控制,因此,技术人员应该综合考虑路面情况、电池电机状态等信息,从而能够计算出最佳的驱/制动力矩,从而能够更好的改善汽车的动力学特性,使得驾驶员能够精准控制每一个车轮,即使面对不同的路况,也能够保障汽车运行的平稳。
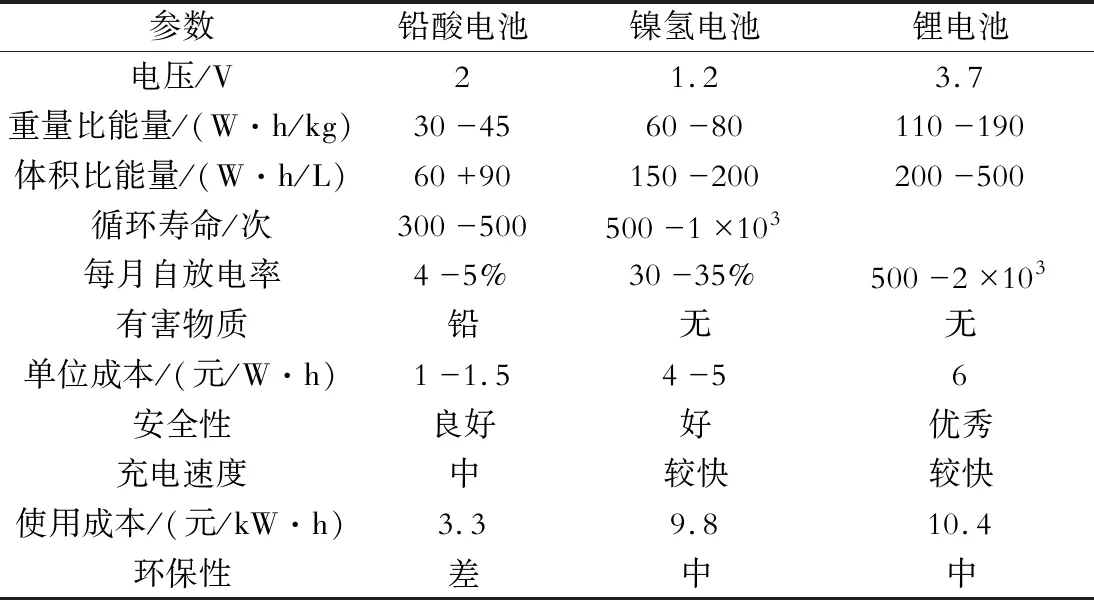
其次,电池是电动汽车的能量储存装置,直接决定着汽车的续航里程,我们主要从两个角度评价电池:一是能量、二是功率,前者是指同等质量的前提下,能量越高的电池在运转的过程中,就能释放更多电能去维持电动汽车的运转,那么汽车的续航里程也会更长。后者是指同样时间的前提下,功率越高的电池能够释放出更多的能量,能够有效满足汽车大功率运转的需求。目前常见的动力电池对比如表3所示:
分布式驱动电动汽车都包含了几个电机,这在某种程度上提升了汽车系统的稳定性,如果某一个电机出现故障的话,汽车系统便会自动重构工作的方式,将电力内驱力分配在剩余驱动电机间,不仅能够保障分布式驱动电动汽车的稳定与安全,充分发挥出剩余驱动力的价值,使得汽车系统仍然能够运行。
2 分布式驱动电动汽车关键技术分析
2.1 悬架集成
分布式驱动电动汽车最主要的特征就是每一个车轮都能够单独制动、转向等,为了方便调整汽车轮距、轴距等,因此,可以将悬架和车轮做成一个悬架总成,将悬架总成按照汽车设计图纸安装在汽车车架上,从而能够更好的调整汽车车轮的位置。悬架总成的元件主要包括减震器、导向机构、轮速传感器等,这一悬架采用双纵臂的形式,中间留有比较大的空间,使得汽车能够安装主动悬架减震器。还有悬架总成支架主要通过铰链连接内外,使得传感器能够测量内外两部分的力,还有减震器上安装了垂向力传感器,通过力学分析,促进能够得到横向力、纵向力。这种测量方法与轮胎六分力传感器相比,虽然丢了一些精度,但是安装成本比较低,能够有效降低汽车的建造成本。还有在悬架集成上安装了专门的转向机构,利用丝杠螺母机构能够将电机转动转向平动再转动,这一转向机构有利于提升悬架的独立性,各个汽车悬架之间也相互独立,能够实现汽车四轮转向、原地转向等。
2.2 车架结构
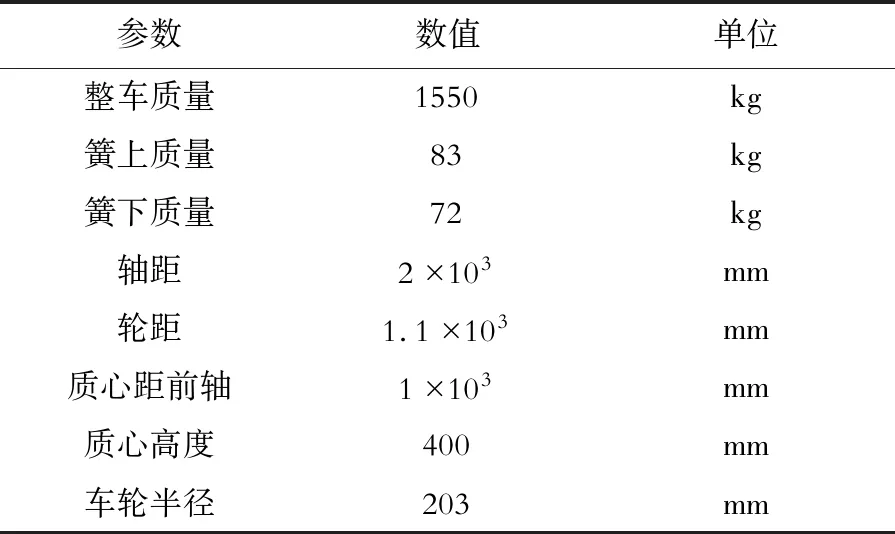
分布式驱动电动汽车的车架结构有所差异,本文重点讨论“纵梁+悬架总成”,主要的结构有电控主缸系统、强电控制器等,通过螺栓将汽车纵梁、零部件以及悬架连接在一起,方便调整汽车零部件的位置,尤其是电源位置。分布式驱动电动汽车的具体参数,如表1所示:
2.3 电气系统
1.1.3 能够实现一体化控制车辆的目的
分布式驱动电动汽车最主要的发展发展之一就是电子控制系统的融合与协调,比如ESC、AFS、ACC等。对于传统汽车来说,不同的电子控制系统有不同的控制方式,这在某种程度上就增加了汽车协调控制的难度,给驾驶员带来了不好的体验。对于分布式驱动电动汽车来说,最主要的动力源就是电机,驾驶人员对于单一电机进行控制,能够有效解决电动汽车运行系统不协调的问题,使得分布式驱动电动汽车的操作系统能够更加便捷,这有利于提升分布式驱动电动汽车操作的可靠性。
在组织关系比较弱散的农村,各级政府的资金、政策等无法直接对接分散的村民,需要村干部将政策学习领会以后,再传达给村民,因此,村干部的素质和人格魅力决定了村民对政策理解的程度,进而影响村民对闲置宅旅游开发的意愿和积极性。
第一眼看到宝贝第一铠甲舰队PLUS这款安全座椅时,不论它的颜色还是细节设计,都给人一种安全感,并且材质也很安全,即使新打开包装时也没有任何的异味。值得一提的是,也是最最关键的一点就是宝贝第一铠甲舰队PLUS这款安全座椅设计特别体贴,在使用ISOFIX接口安装时只要对准汽车锚点轻松一推就安装好了,并配合使用上拉带固定,连接到位后由灰色变成绿色指示就说明安装正确了,反之则表示没有正确安装。安装轻松又便捷,像我们这么神经大条的家长都能觉得顺利安装,各位家长们还在等什么,赶紧买买买吧。
分布式驱动电动汽车利用4组悬架进行制动,每一个制动机都会安装一个专门的控制器,两个电机合用一个电池,这种设计不仅能够提升汽车的动力电池,使得电池能够储存更多的电能,这有利于提升电动汽车的续航里程。还可以将电动汽车里的强电控制集成模块形成一个强电控制器,利用双刀来控制两路,为电动汽车的电机供电,这有利于提升电动汽车各个系统的安全性。还有在每一个继电器上都安装了专门的电阻和二极管,以此来保护电动汽车的继电器。
2.4 整车控制器
整车控制器是电动汽车的核心控制部件,主要包括接受传感信号、运行上层控制算法、控制驱动电机控制器等,电动汽车控制器由主控制器和从控制器组成,两者之间通过CAN进行通讯,整车控制器的核心部件是微控制器,它最主要的功能是采集信号、输出信号等,比如英菲凌XC2265N芯片,这个芯片包含了16个微处理器、32KB的RAM、拥有3路CAN、16路AD等。不管是主控制器,还是从控制器,都是非常复杂的控制系统,各个模块之间也相互独立,为了能够方便控制,才安装了电机控制器。在电动汽车上安装了专门的线路板,避免出现主控制器和从控制器线路连接混乱的问题。
2.5 液压线控制动系统
液压线控制系统最主要的功能就是提供液压制动力,本文采用电控主钢系统+液压谢孔调节系统,其中电控主缸系统的动力源是直流有刷电机,利用丝杠螺母机构使得主缸能够产生压力,当压力增加的时候,电机能够朝着正向运转,再通过压力传感器来测量压力,再利用电机进行反馈控制。还有液压线控调节系统的构件主要包括高速开关阀、制动管路等,最主要的功能就是控制制动液的流动方向,再利用传感器来测量汽车的液压力,根据测量结果来调节汽车的运行状态,使得汽车能够平稳。
3 分布式驱动电动汽车未来发展
首先,分布式驱动电动汽车最主要的动力源便是电机,这在某种程度上增加了车载质量,对于汽车的平稳安全运行造成了不利的影响。为了能够提升分布式驱动电动汽车的可靠性,技术人员可以利用悬架系统抑制轮毂来降低车载负效应,这有利于提升分布式驱动电动汽车的稳固性与舒适性。因此,在未来,应该开发出线控子系统分布式驱动底盘和适应性悬架系统。还有现有的分布式驱动电动汽车电子零部件设置的空间有限,再加上其运转和工作的环境相对来说比较恶劣,为了能够提升分布式驱动电动汽车运行的稳定性,技术人员可以采取一体化集成设计以及控制方法,研发出一款高质量的电机系统。电机系统所涉及的专业领域和内容很多,比如机电领域、热能领域等,电机运行的环境非常复杂,如果电机运转的速度、转矩控制不好,很容易导致汽车出现运行不稳定、不安全的现象。因此,在未来,应该开发出合适的减速系统和大扭矩电机,利用电机结构形式和工艺去提升电机转矩的密度。
其次,分布式电动汽车的轮胎作用力呈现出非线性、强耦合的特征,整个轮胎的状态的各个参数构成了非线性高数,各个方向之间存在着非常复杂的耦合关系。如何利用电机反馈信息来改善汽车的状态,这个问题困扰着许多专家和学者,针对这一问题,有一些专家学者提出分布式电动汽车可以在电机能力输出范围之内实现精确控制动力矩、轴矩,能够将电机内驱力有效地分配,这有利于提升分布式电动汽车的经济性。还有分布式驱动电动汽车最主要的发展方向就是全线控底盘,将线控驱动和线控转向集为一体,为车辆底盘集成控制提供了足够高的自由控制度,但是由于汽车各个子系统之间的相互影响,最关键的一点就在于如何控制底盘子系统的解耦,在未来,一定要综合考虑汽车耦合时变、扰动等各个因素,以此来实现协同控制汽车底盘的目的,以此来提升汽车运行系统的可靠性。
依据CCUS技术的研发进展,预计2035年,第一代捕集技术的成本及能耗与目前相比降低15%~20%;2045年前后,第二代捕集技术实现商业应用,成本及能耗将比第一代技术降低10%~15%;2050年,CCUS技术实现广泛部署,建成多个CCUS产业集群。
4 结束语
综上所述,本文重点分析的分布式驱动电动汽车的优势以及关键技术,在此基础之上分析分布式驱动电动汽车未来发展方向,我们国家应该重点研究分布式驱动电动汽车的开发技术,以此来地推动电动汽车产业的发展。
[1]李志辉.电驱系统能量分布及电机温升特性研究[D].吉林大学,2021.
[2]刘璇,王子航,张桐瑞,等.港口重载AGV横向稳定的优化控制策略[J].华南理工大学学报(自然科学版).2021,49(8).113-121.
[3]薛昊渊,连晋毅,王嘉仑,等.阿克曼转向模型的改进及其电子差速控制仿真[J].汽车实用技术.2020,(10).118-121.
[4]姜涛.前后轴独立驱动电动汽车转矩控制策略研究[D].北京交通大学,2019.
