多通道高计数率单光子计数系统的设计与实现*
2022-09-27李凉海赵一鸣王丽东时志云胡涛涛
潘 超,李凉海,赵一鸣,王丽东,时志云,胡涛涛
多通道高计数率单光子计数系统的设计与实现*

(1 北京遥测技术研究所 北京 100076 2 中国航天电子技术研究院 北京 100094)
光子计数探测具有极高的探测灵敏度,已成为大气探测激光雷达的主流探测手段。设计了一种基于FPGA的8通道高计数率单光子计数系统,提出了一种基于多相时钟过采样的光子脉冲检测方法,实现了2 ns的光子脉宽分辨率、200 MCPS的光子计数率、无死时间的连续多通道同步计数,具有高计数率、高实时性、高集成度的特点。系统已装备于北京遥测技术研究所研制的多波长拉曼偏振大气探测激光雷达中,在激光雷达大气遥感中发挥了重要作用。
光子计数;大气探测激光雷达;微弱信号探测;FPGA
引言
大气探测激光雷达是用于大气气溶胶、水汽探测及特性研究的有效工具,不仅可定量获取不同探测波长下大气气溶胶和云的光学参数空间分布,还可反演得到气溶胶和云的微物理参数空间分布[1,2],是近年来激光大气遥感的重点发展方向。大气探测激光雷达大多采用非相干探测,利用接收望远镜接收脉冲激光与目标大气相互作用产生的后向散射光信号,通过光电倍增管PMT(Photomultiplier Tube)等光电探测器将后向散射光信号直接转换为随时间变化的光电流,再通过模拟探测、光子计数探测等方式实现光电流的测量,进而反演出探测目标大气光学参数与微物理参数的时空分布。
模拟探测采用高速模数转换方法,将光电探测器输出的微弱电流数字化,获得随时间变化的后向散射信号强度信息,此方式适合测量相对较强的光信号,具有较好的线性。当光信号极其微弱时,受系统电噪声的影响,探测灵敏度不高,一般在nW量级。而光子计数探测则是利用在弱光条件下,光电探测器输出电信号为离散脉冲的特点,采用脉冲甄别技术对单位时间内光子脉冲个数进行统计,由于单位时间内的光子数与光强成线性关系,从而实现激光雷达后向散射光强的获取[3]。因此,光子计数探测具有灵敏度高、抗干扰能力强、线性区宽和可实现快速实时处理等优点。随着大气激光雷达逐渐向高重频、低单脉冲能量、多通道多模式发展,导致单脉冲后向散射回波信号极为微弱,回波信号功率一般都在pW量级,使得光子计数探测已逐渐取代模拟探测,成为大气探测激光雷达主流探测手段。
对于多波长、多通道大气探测激光雷达,单光子计数探测要求探测系统具有高带宽、高计数率和高时间分辨率,多通道探测要求系统具有高并行处理能力、高数据吞吐率、高集成度与低功耗[3]。传统的探测系统利用现场可编程门阵列(FPGA)与数字信号处理芯片(DSP)组合的形式,用FPGA实现系统控制,DSP实现信号处理。由于DSP为串行处理,为了满足多通道实时处理势必会带来更复杂的实现结构与更高的功耗。本文设计开发了一套基于FPGA的大气探测激光雷达多通道单光子计数系统,将系统控制和多通道光子信号采集处理算法,采用FPGA内部逻辑实现,使得系统具有更高的实时性和集成度以及更低的功耗,更加有利于多波长、多通道大气探测激光雷达的应用。本系统已装备于北京遥测技术研究所自主研制的多波长拉曼偏振大气探测激光雷达系统,用于355 nmP、355 nmS、532 nmP、355 nmS、386 nm、407 nm、607 nm、1 064 nm(P代表平行偏振,S代表垂直偏振)八个接收通道的光子信号采集、统计与分析,实现了弹性散射、偏振散射、拉曼散射通道的一体化测量。
1 光子计数理论基础
在大气激光雷达探测目标散射回波时,如图1所示,当输入到探测器靶面的光功率在10–9W以上时,光电探测器输出的光电流为连续的电流信号;当输入光功率在10–11W以下时,光电探测器输出的光电流呈现为离散的光电子信号脉冲,且脉冲堆叠(pile up)效应较少[4]。因此,可采用光子计数的方法检测处理入射光子数,实现极弱光功率的测量。
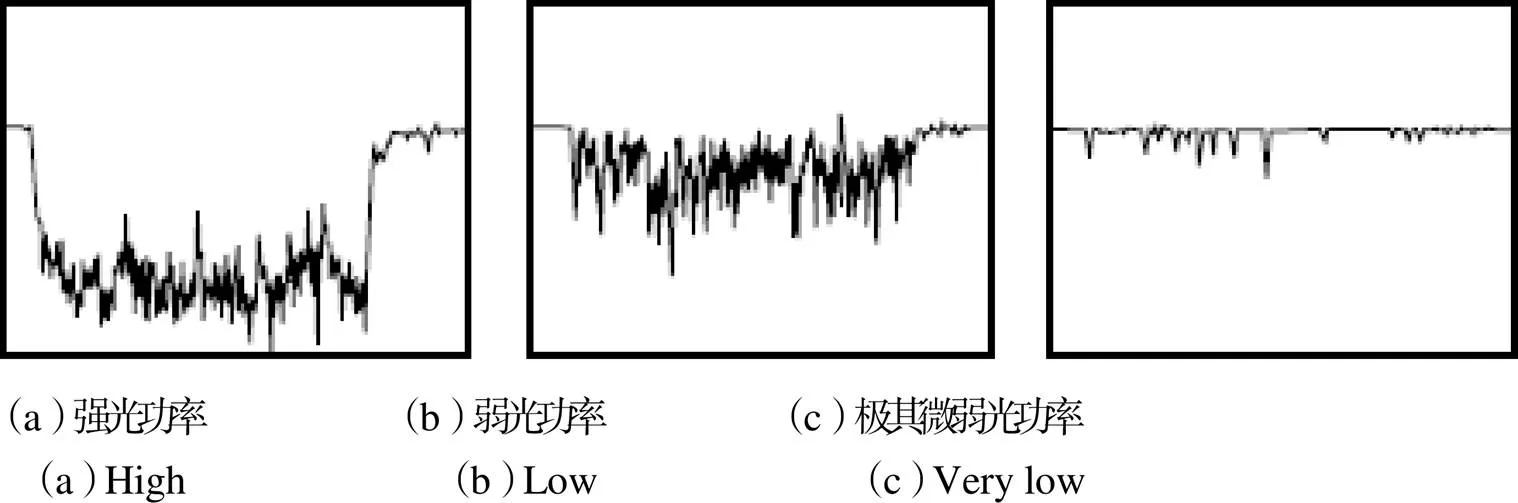
图1 PMT探测器不同光强下输出的光电子电流信号
典型的光子计数探测流程如图2所示。光电倍增管对输入光子进行光电转换,输出离散的光子电流脉冲,对光子电流脉冲进行电流-电压转换、反向放大、比较甄别、电平转换整形后,输入到光子计数系统进行计数与累加处理[4]。
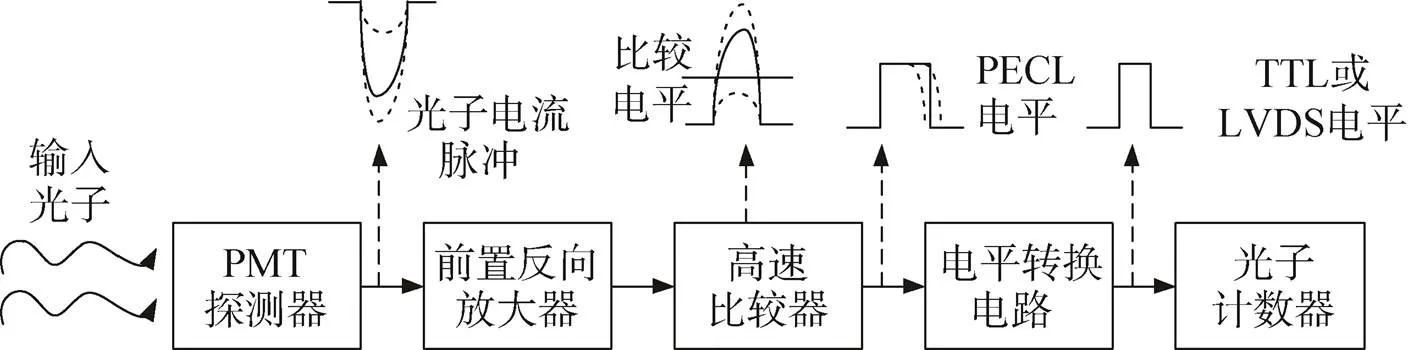
图2 典型的光子计数处理流程
大气探测激光雷达光子计数时序如图3所示。激光器在系统控制器触发信号的激励下发射激光脉冲,同时,系统控制器产生光子计数波门,光子计数器在波门有效条件下,将波门划分为若干个连续的时间片(time bin),每个时间片对应相应距离的接收距离门。在每个时间片内检测光子脉冲,并对检测出的光子脉冲个数进行累加计数,得到单个回波接收距离门内光子脉冲计数值。完成所有距离门的光子脉冲计数后,结束单次计数流程。雷达光子计数系统在周期性的光子计数波门激励下连续工作,并按一定积累时间对多个波门得到的,回波接收距离门序列内光子脉冲计数值,进行对应距离门计数值累加,获取激光雷达光子计数通道的积累回波,此回波即为激光雷达探测的原始回波信号。
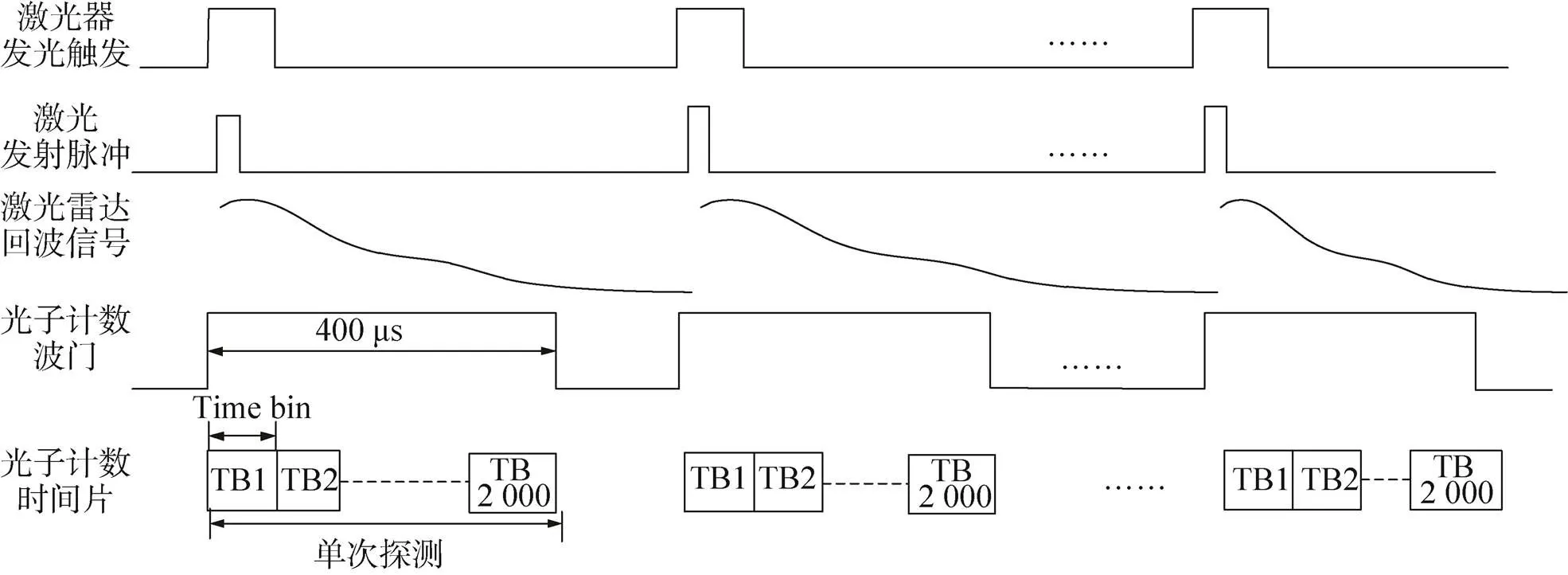
图3 大气探测激光雷达光子计数时序
2 光子计数系统设计
2.1 关键指标分析
光子计数系统关键指标包括光子计数率、模拟带宽、计数时间片宽度、计数波门宽度、死时间以及计数器位数与最大积累次数等[4, 5],下面对其主要指标进行分析。
①计数率与模拟带宽:在激光雷达光子计数探测过程中,计数率表征了光子计数系统可分辨的最小脉冲时间间隔,而模拟带宽决定着系统对窄脉冲的响应能力。大气探测激光雷达的光电转换探测器,其输出电流脉冲宽度一般在2 ns ~10 ns之间,最小脉冲间隔要求一般为5 ns~20 ns。本文中的大气激光雷达选用日本滨松光电(hamamatsu)的PMT探测器H10721系列,单光子脉冲宽度约为2 ns,因此,本系统设计的模拟带宽大于250 MHz,最高计数率大于200 Mcount/s。
②计数时间片宽度与波门宽度:激光雷达光子计数模式中,时间片宽度对应了激光雷达的距离分辨,计数波门宽度决定了最大探测距离。理论上,时间片宽度越小越好,波门宽度越宽越好,但受限于FPGA内部的计数器资源与缓存空间,需要折中考虑。对于大气激光雷达,一般距离分辨要求7.5 m~60 m,最大探测距离要求15 km~60 km,对应时间片宽度为400 ns~500 ns,计数波门宽度为100 μs~400 μs。
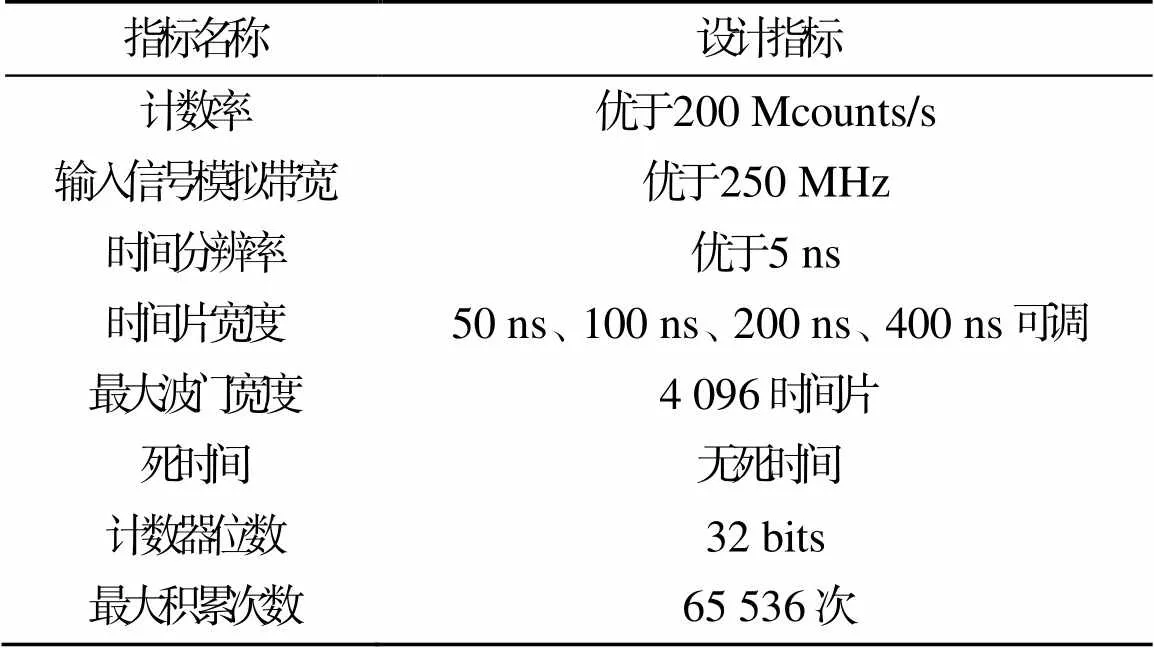
表1 大气探测激光雷达光子计数系统主要指标
③死时间:光子计数系统的死时间是指:计数器因保存数据而无法接收光子脉冲的时间,要求尽量避免死时间产生[6]。本系统计数逻辑单元在FPGA中实现,采用并行的乒乓工作模式,数据缓存或传输时可正常计数,所以本系统无死时间。
大气探测激光雷达光子计数系统主要指标见表1。
2.2 系统总体设计
大气探测激光雷达光子计数系统以ZYNQ-7000 FPGA为核心控制处理器,发挥Z7系列FPGA高性能以及片内的ARM处理器的优势,单片FPGA实现所需功能,从而压缩产品尺寸,降低产品功耗,提升可靠性。系统原理框图如图4所示,主要由光子信号整形模块、系统触发模块、高速FPGA、千兆网接口模块和相关的时钟电源电路组成。其中,光子信号整形模块由前置放大电路、甄别电路、电平转换电路组成。系统输入包括激光雷达所接收到的多通道大气后向散射回波信号和系统触发信号,系统的输入回波信号是PMT探测器输出的电流脉冲,脉冲宽度约为2 ns,每个脉冲代表一个光子;系统输入的触发信号是周期为1 ms、脉宽为1 μs的方波。
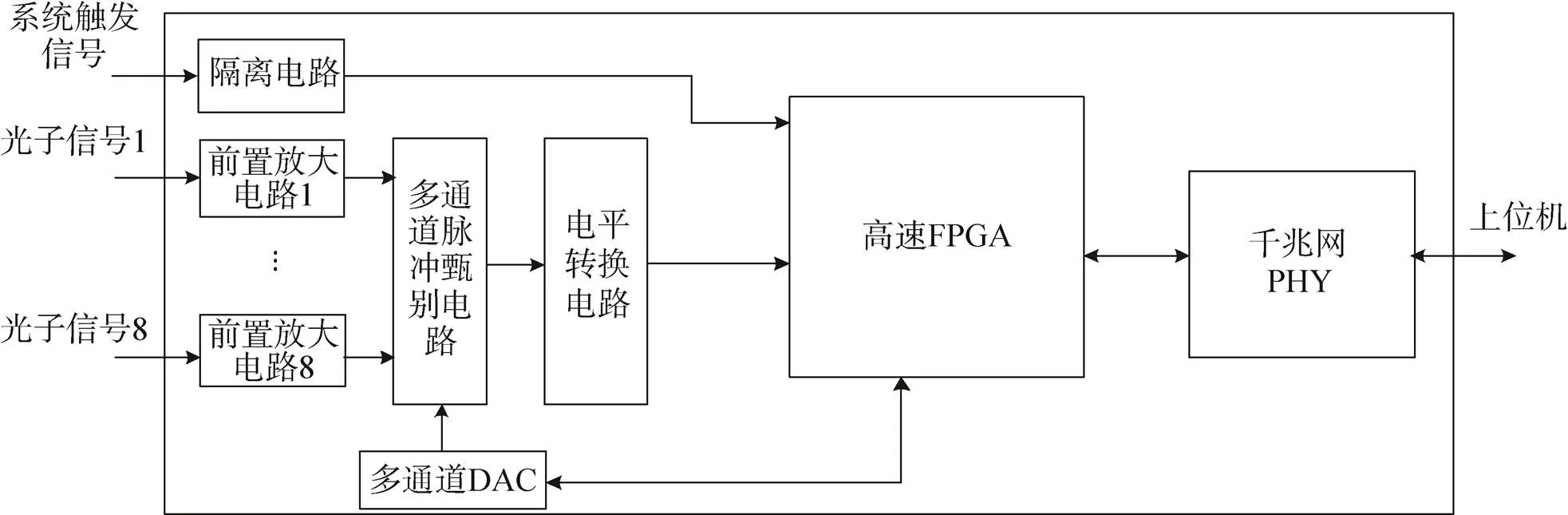
图4 光子计数系统原理框图
系统上电启动后,输入探测器电流脉冲经放大电路、甄别电路、电平转换电路进行放大、甄别、电平转换,最后以LVDS电平送入高速FPGA,高速FPGA在系统同步信号触发下,对信号脉冲进行计数,每隔一定数量时间片,将计数保存,并将计数器清零重新计数,从而得到单个触发下脉冲计数随时间的变化数据。由于回波信号较弱,单独一次计数结果不满足信噪比要求,高速FPGA将多触发下计数结果进行非相干积累,最终形成激光雷达回波强度随时间变化的积累数据,通过对千兆以太网传输给上位机。系统运行所需参数,如比较阈值、计数延时、计数门宽、累加次数等,可以由上位机通过千兆网口设定。
2.3 光子整形模块设计
光子整形模块主要由放大电路、比较器与电平转换芯片组成。放大电路将输入的微弱电流信号转为电压信号,同时提供适当增益,比较器对放大后信号进行检测,并转换为数字信号,输出的数字信号经电平转换后接入FPGA。光子整形模块实现框图如图5所示。
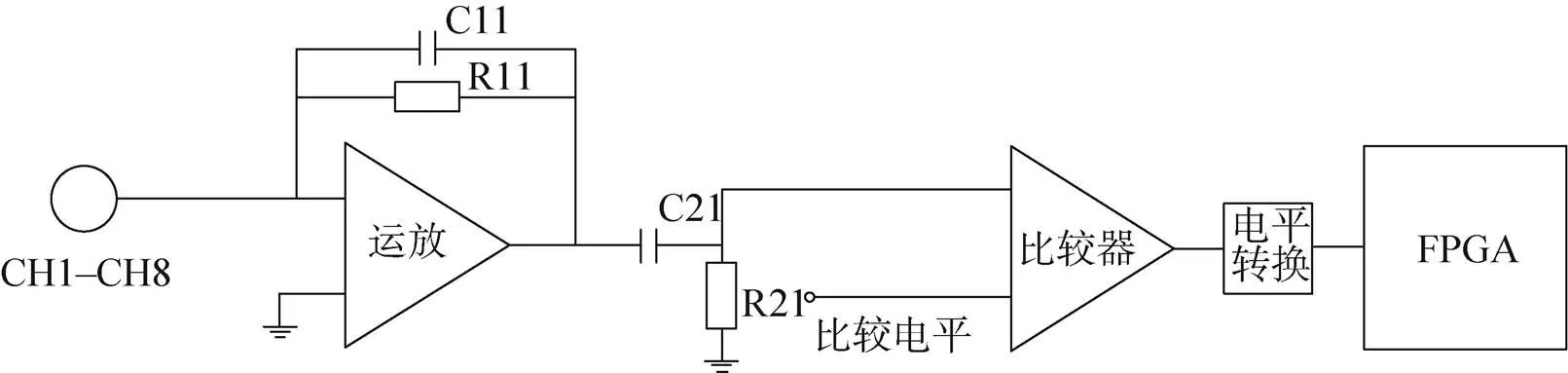
图5 光子整形模块原理框图
由于前端PMT探测器输出的是电流信号,需要电流电压转换才能被后续甄别电路处理,电流电压转换可采用负载电阻无源取样的方式或跨阻放大的有源放大的方式来实现。负载电阻无源取样时,过小的取样电阻会导致后续电压放大的噪声对整体噪声性能影响很大,从而降低光子脉冲的鉴别能力;过大的取样电阻会对PMT输出电流脉冲的响应时间产生较大影响,降低光子计数的时间分辨率。同时,由于PMT内部增益可达106,输出的单光子脉冲电流峰值可达1 mA。综合考虑,本系统选择低输入噪声、高摆率、低失真运放OPA847,以单级跨阻放大方式实现I-V转换与放大。其中,跨阻增益由R11决定,在系统中选择R11的数值为1 000 Ω,可提供–1 000 V/A的跨阻增益。此时,相位补偿电容C11,可由式(1)计算确定:

此时可获得260 MHz的平坦响应。
为了降低放大后低频噪声以及外界的低频干扰对后端比较器的影响,跨阻电路与比较电路之间设置了高通滤波器,C21与R21组成高通滤波器,截止频率为10 kHz。比较器选用AD公司的ADCMP562。比较器具有极低的输入输出延迟与输出延迟抖动,比较器的比较电压由DAC产生,FPGA可根据设置配置DAC参数,灵活配置需要的比较电平。比较器输出电平为差分LVPECL电平模式,经电平转换为LVDS电平后送入FPGA进行后续计数。
2.4 FPGA及光子计数设计
FPGA作为板卡的核心器件,实现8通道光子脉冲的检测计数以及与上位机的网络通信等功能。芯片选择Xilinx公司Zynq-7030FPGA,在单芯片中集成了基于双核ARM Cortex-A9处理器的嵌入式处理系统和可编程逻辑系统。其中,双核ARM处理器是平台的心脏,它包含了片上存储器、外部存储器接口和一套丰富的I/O外设。FPGA的PS端外接2片DDR3存储器构建1个32位宽1 GB的外部存储器,用于过程数据缓存;外接一片4位宽的SPI NOR flash,用于代码存放。
FPGA按功能分为PS内的网络模块和PL中的测量模块。其中,网络模块基于ARM处理器架构的SOC系统实现,包含了处理器、外围设备、操作系统、板级软件支持包、驱动集合,能够提供完善的千兆以太网支持,实现与上位机的信息交互。而测量模块基于可编程逻辑资源实现,负责实现光子脉冲测量及其它外部总线接口,两者之间通过共享存储区数据交互。操作系统选用VxWorks实时操作系统,并根据硬件板卡资源和软件需求进行剪裁,以适应板卡上的硬件配置以及用户应用程序的软件需求。FPGA周边电路和内部架构如图6所示。
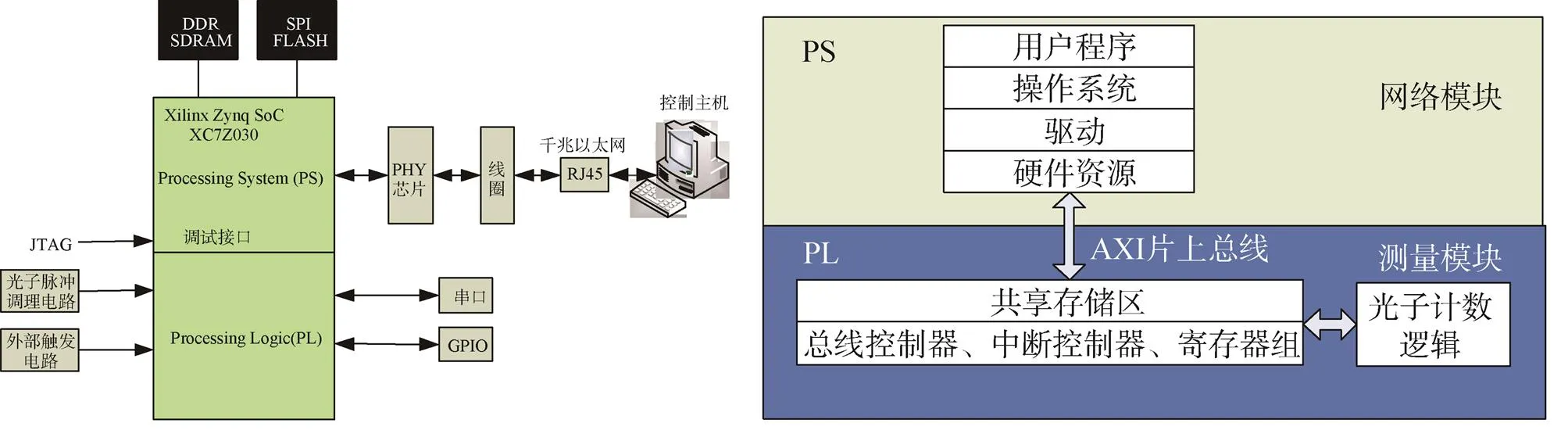
图6 FPGA周边电路及内部逻辑
光子计数功能是系统的核心功能,本方案中采用了一种基于多相时钟的过采样技术,使计数分辨率可达2 ns,实现高计数率的光子检测。其实现方式如下:FPGA接收外部1 GHz的系统时钟,通过内部混合模式时钟管理器(MMCM)产生4个相位的250 MHz时钟,相位分别为0°、90°、180°和270°。利用这四个相位的时钟分别对输入的光子脉冲采样,并将四相时钟采样的码值送入脉冲沿检测算法模块。为保证两个连续时刻之间的采样码不丢失,利用双FIFO乒乓操作将前后两个时刻的采样码存入各自的FIFO中,同步进行光子脉冲沿检测,根据4 bit的采样码值中高低电平跳变判断出当前是否有光子脉冲,解决了光子计数的死时间问题。光子检测的结果存入脉冲计数模块的FIFO中,并将每个重频周期中对应波门的脉冲数累加,达到累积重频个数后,将计数结果通过共享存储区进行数据交互,由片内ARM处理器调度,将缓存的计数值通过千兆以太网上传到上位机。原理框图如图7所示。
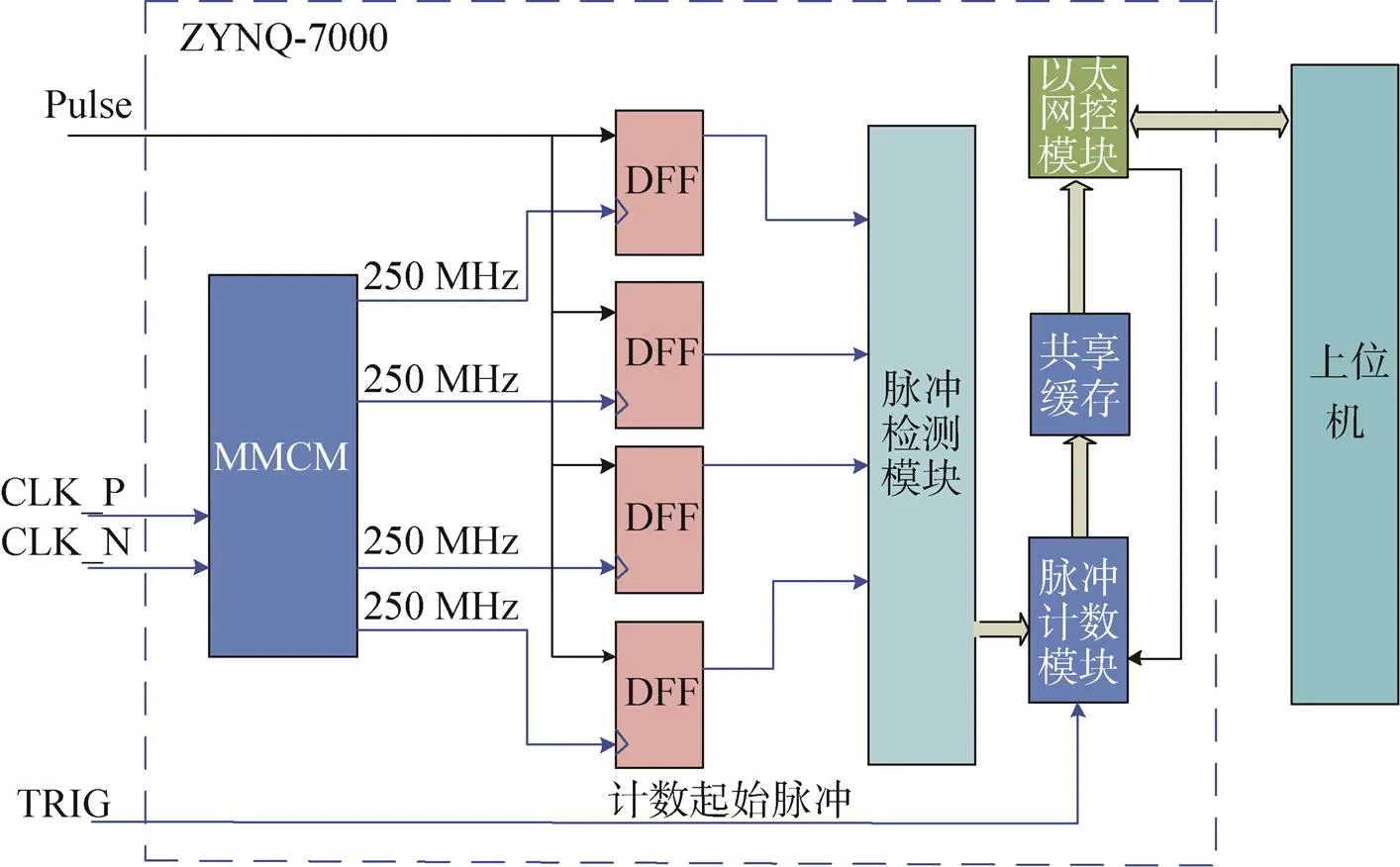
图7 光子计数功能FPGA内部功能框图
3 系统测试与应用
光子计数系统实物照片如图8所示。利用标准仪器搭建测试系统对光子计数系统进行测试,测试框图如图9所示。用脉冲信号源分别产生2.5 MHz、5 MHz、10 MHz、20 MHz、25 MHz、30 MHz、50 MHz、67 MHz、100 MHz、200 MHz的脉冲信号,脉冲宽度为2 ns,脉冲幅度为10 mV,模拟单光子探测器信号输入系统,光子计数系统采用内触发模式,重频周期设置为1 kHz,门宽为200 ns,连续累计1 000个重频周期。图10所示为本系统对输入200 MHz脉冲信号实际采集结果与相对误差;图11所示为信号源输入不同周期的脉冲信号与本系统实际测量值的拟合结果,通过拟合结果分析,得到线性拟合参数2=0.999 9,线性度优良。
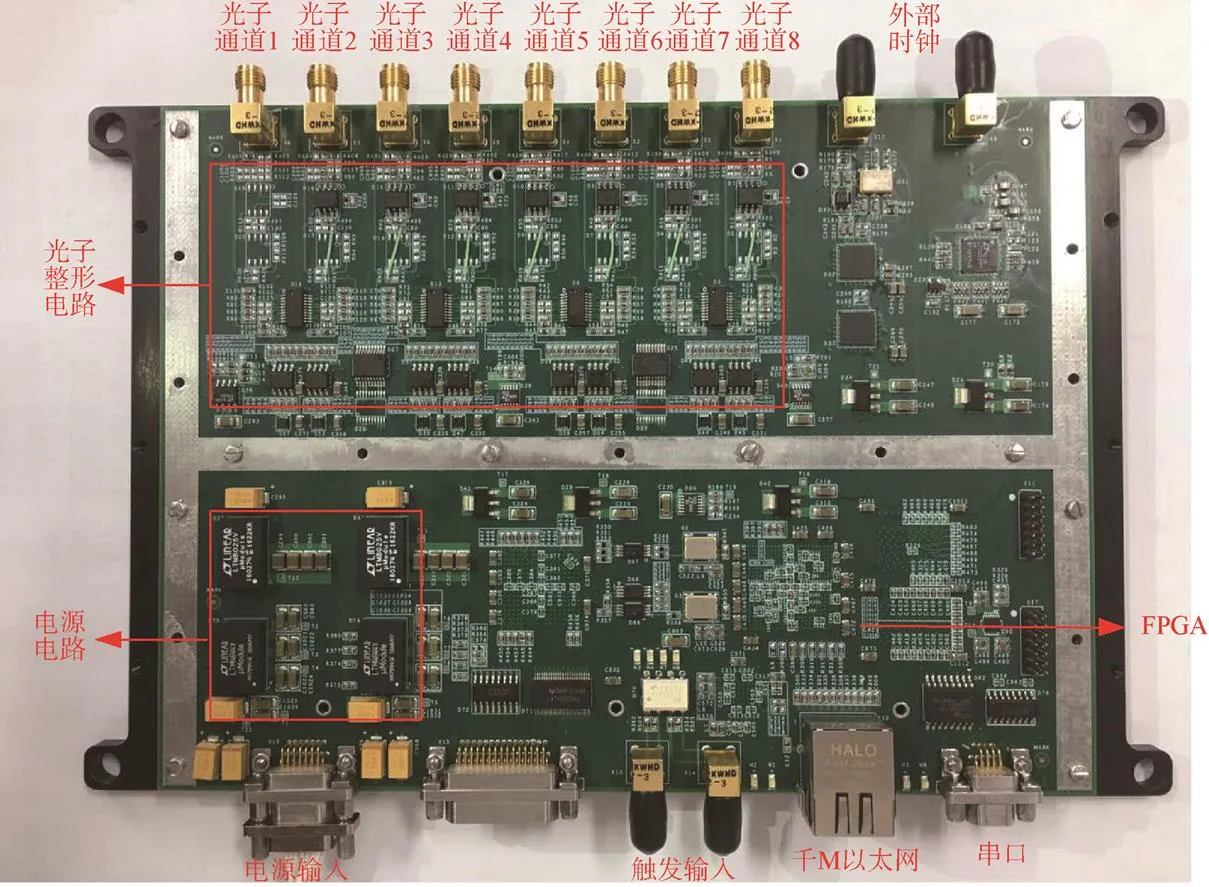
图8 光子计数系统实物图
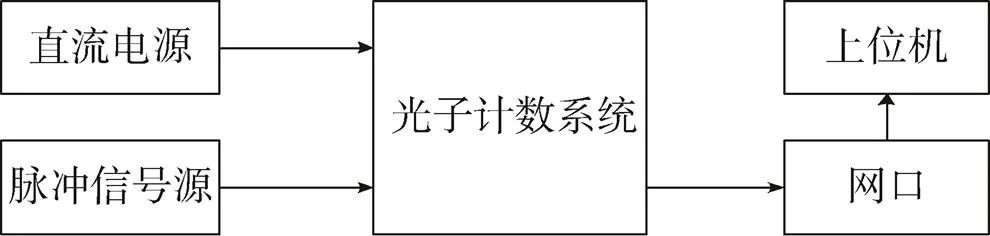
图9 光子计数测试系统
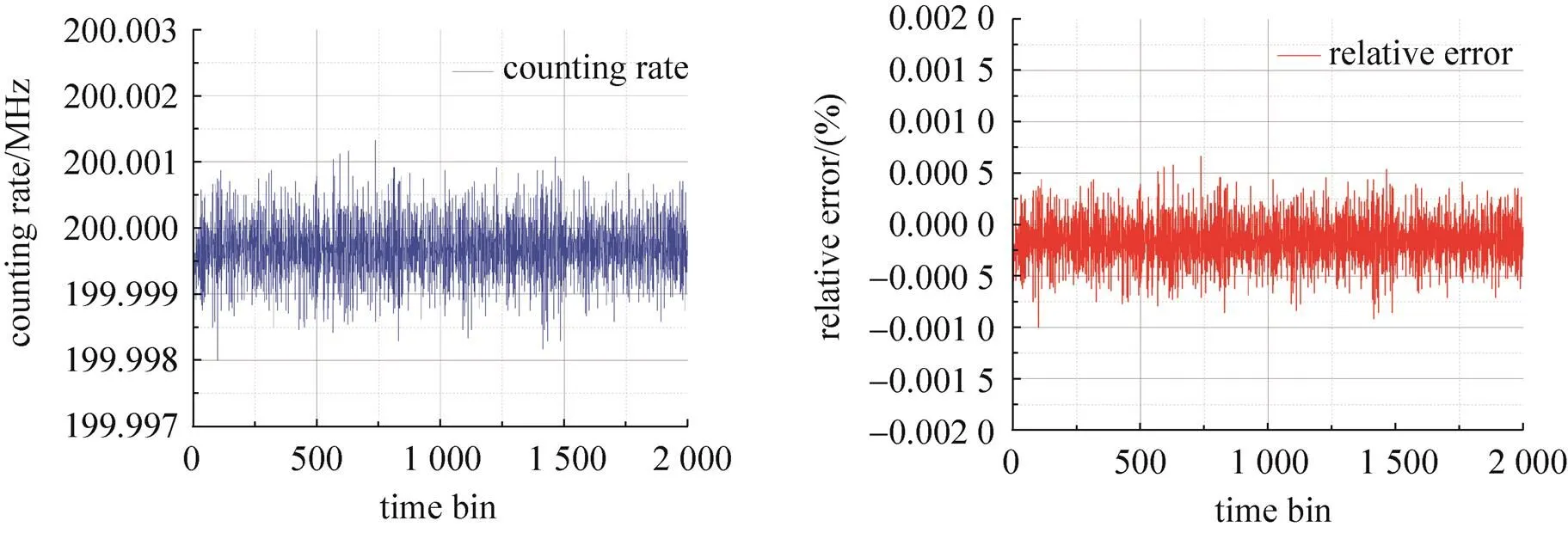
图10 输入200 MHz脉冲信号采集结果与相对误差
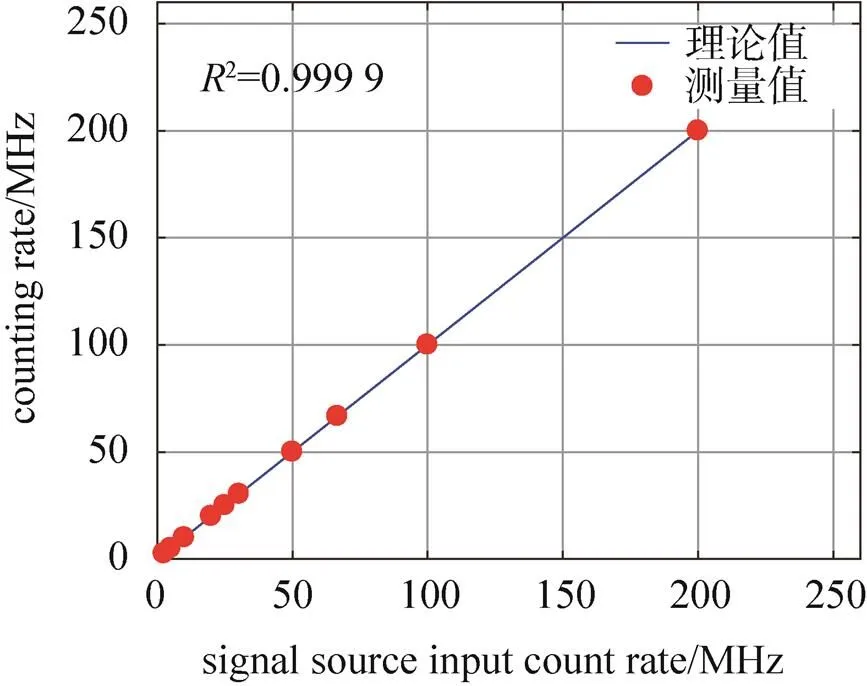
图11 系统线性度测试结果
本系统已装备于北京遥测技术研究所自主研制的多波长拉曼偏振大气探测激光雷达系统[7,8],图12是2021年8月17日激光雷达连续对天顶观测24小时的结果,光子计数系统稳定可靠运行。对8路接收通道中某一通道(532 nm平行偏振通道)采集到的原始大气回波信号进行数据处理后的结果如图12所示。由图12(a)可见,距离修正信号廓线在高空与分子信号拟合良好,验证了探测数据的准确性,同时该廓线还清晰刻画了低空气溶胶层、3 km~5 km处的薄云和8 km~10 km的高空卷云;由图12(b)时间序列时空演化图可见,激光雷达系统可连续稳定探测大气中气溶胶和云的时空变化过程,数据连续平滑且信噪比高,验证了光子计数系统性能优异。
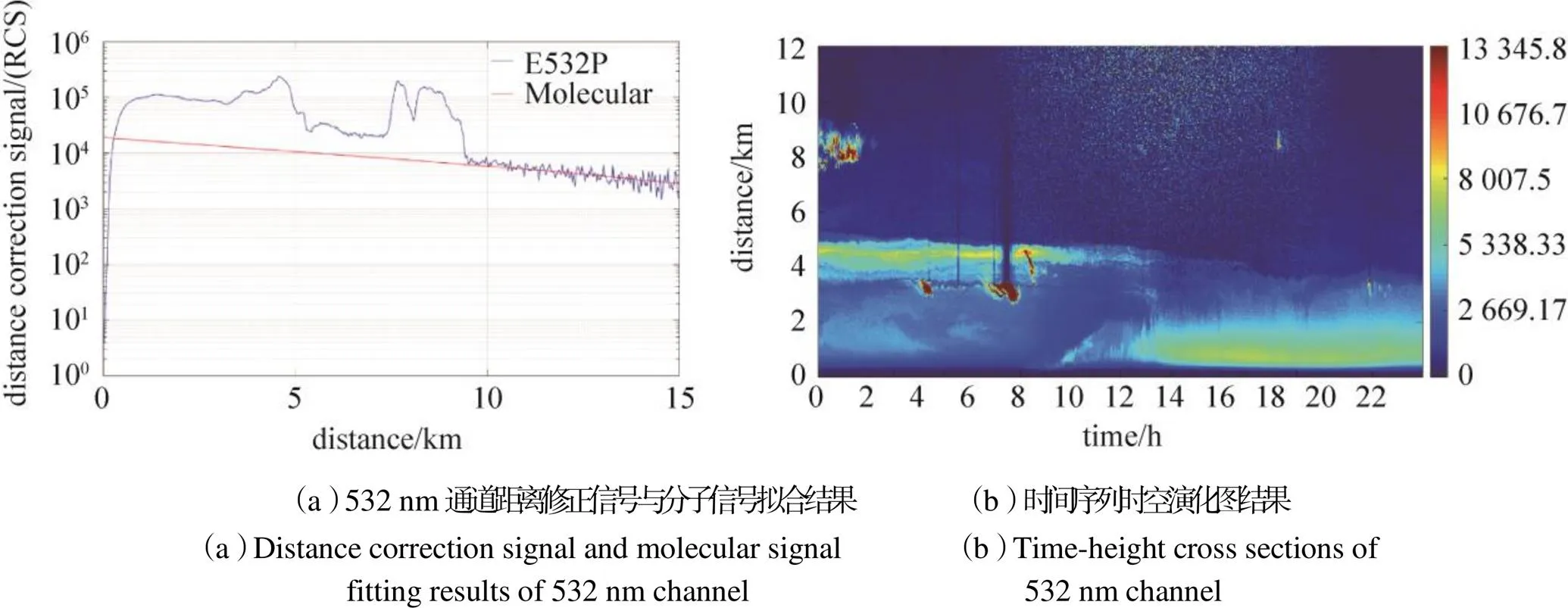
图12 激光雷达回波计数与处理结果
4 结束语
本文设计开发了一套基于FPGA的大气探测激光雷达多通道单光子计数系统,将系统控制、多通道光子信号采集处理算法采用FPGA内部逻辑实现,使得系统具有更高的实时性、集成度与更低的功耗。该系统现已装备于北京遥测技术研究所的多波长拉曼偏振大气探测激光雷达中,用于雷达系统多通道回波信号的光子计数探测,性能优异。该系统还可应用于核物理、生物化学等光子计数探测场景,具有较高的工程应用价值。
[1] VLADIMIR A K, WILLIAM E E. Elastic Lidar: Theory, practice, and analysis methods[M]. Canada: A John Wiley & Sons, Inc., 2004.
[2] 赵一鸣, 潘超, 王丽东, 等. 激光雷达探测河北望都气溶胶[J]. 遥测遥控, 2015, 7(4): 64–70.
ZHAO Yiming , PAN Chao, WANG Lidong, et al. Aerosol monitoring by Lidar at Wangdu, Hebei[J]. Journal of Telemetry , Tracking and Command, 2015, 7(4): 64–70.
[3] 文斐. 激光雷达数据采集系统框架研究[D]. 合肥: 中国科学技术大学, 2013.
[4] Photomultiplier Tubes Basics and Applications[M]. Japan: Hamamatsu Photonics K. K., 2007.
[5] 梅文华, 刘建国, 张天舒, 等. 激光雷达的单光子计数器计数实现[J]. 大气与环境光学报, 2012,9(5): 364–369.
MEI Wenhua, LIU Jianguo, ZHANG Tianshu, et al. Counting achievement of Lidar's single photon counter[J]. Journal of Atmospheric and Environmental Optics, 2012, 9(5): 364–369.
[6] TRYBULA A, DOMANSKI G, KONARZEWSKI B, et al. Single photon counting system for biomedical applications[C]// International Workshop on Medical Measurement and Applications, 2007.
[7] PAN Chao, ZHAO Yiming, SONG Changbo, et al. Monitoring of atmospheric particles in Beijing and Dunhuang using a Raman Lidar with enhanced dynamics[C]// International Journal of Remote Sensing Applications, 2013.
[8] ZHAO Yiming, YU Yong, LI Lianghai, et al. Implementation of high dynamic Raman Lidar system for 3d map of particulate optical properties and their time evolution[C]// International Journal of Remote Sensing Applications, 2013.
Design and realization of multi-channel high count rate photon counting system
PAN Chao1, LI Lianghai2, ZHAO Yiming1, WANG Lidong1, SHI Zhiyun1, HU Taotao1
(1 Beijing Research Institute of Telemetry, Beijing 100076, China 2 China Academy of Aerospace Electronics Technology, Beijing 100094, China)
Photon counting detection has extremely high detection sensitivity and has become the mainstream detection method of atmospheric detection Lidar. This paper designs an 8-channel high-count rate photon counting system based on FPGA. It is proposed a pulse detection method based on multi-phase clock over-sampling. The system can achieve the photon pulse width resolution of 2 ns, photon counting rate of 200 MCPS, and continuous multi-channel synchronous counting without dead time. It has the advantages of high counting rate, high real-time performance and high integration. The system is now equipped in the atmospheric multi-wavelength Raman polarization Lidar (AMPLE) developed by Beijing Research Institute for Telemetry(BRIT), which plays an important role in Lidar atmospheric remote sensing.
Photon counting; Lidar; Weak signal detection; FPGA
TN958.98
A
CN11-1780(2022)05-0089-08
10.12347/j.ycyk.20211231001
潘超, 李凉海, 赵一鸣, 等.多通道高计数率单光子计数系统的设计与实现[J]. 遥测遥控, 2022, 43(5): 89–96.
DOI:10.12347/j.ycyk.20211231001
: PAN Chao, LI Lianghai, ZHAO Yiming, et al. Design and realization of multi-channel high count rate photon counting system[J]. Journal of Telemetry, Tracking and Command, 2022, 43(5): 89–96.
基金项目:中国航天科技集团自主研发项目“宽幅激光三维测量与复合成像技术”
2021-12-31
2022-01-19
潘 超 1981年生,硕士,研究员,主要研究方向为激光雷达系统设计。
李凉海 1965年生,硕士,研究员,主要研究方向为雷达系统设计。
赵一鸣 1983年生,博士,研究员,主要研究方向为激光雷达系统设计。
王丽东 1987年生,硕士,高级工程师,主要研究方向为激光雷达数据处理。
时志云 1980年生,硕士,高级工程师,主要研究方向为激光雷达电气设计。
胡涛涛 1985年生,硕士,工程师,主要研究方向为激光雷达电气设计。
(本文编辑:傅 杰)
