现有膝关节助力器的若干问题及改进建议
2022-09-27郑朝辉戴雪松钱菁
郑朝辉,戴雪松,钱菁
(1.浙江大学医学院附属第二医院,浙江杭州 310009;2.浙江省青春医院,浙江杭州 310020)
众所周知,膝关节损伤对中老年人群和运动员是一种常见病,大多数中老年人膝关节都存在退行性病理改变,还有运动受伤。其表现为半月盘损伤、韧带或肌肉受伤、骨质疏松等,轻者影响生活质量,重者要进行手术,往往在手术以后会有很长的康复治疗阶段,很多人常常采用拐杖支护,这当然会带来生活不便。现在很多国家都在应用一种《膝关节助力器》并且已经成为商品,它外置在体外,而且不影响观感,因此得到广大患者的喜欢,但是这类膝关节助力器大多从感性经验出发设计,对膝关节的生物力学作用原理考虑不充分,因此效果有限,使用不当还会造成伤害。因此,本文拟对现有膝关节助力器的若干问题进行总结,并借此提出改进建议,以使膝关节患者得到更好的康复保护。
1 膝关节传力机理
膝关节是人体最完善最复杂的关节,它负重多又运动量大,是下肢活动的枢纽。膝关节属于结构十分完善的滑膜关节,它不仅具备滑膜关节必备的关节面、关节腔和关节囊这些主要结构,而且还具有像半月板、韧带、滑囊和脂肪垫等辅助结构。由于结构复杂,运动量大,所以其伤病率位居所有关节之首。因此,了解膝关节的生物力学性质和行为,有助于更好的理解膝关节各类损伤的根源及关节退行性改变的病理学,作为正确设计各类膝关节伤病后的康复方案、和各类人体膝关节助力器的依据。
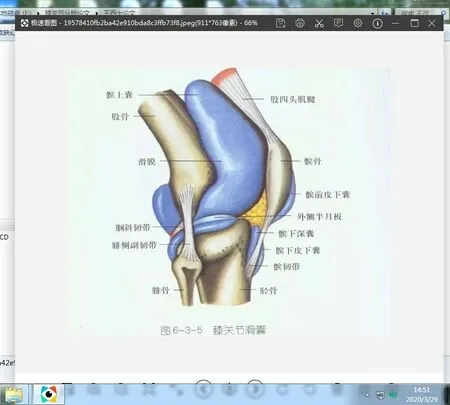
图1膝关节构造示意图
现在国内外发表的,从生物力学角度来研究膝关节传力机制的论文已经多达数百篇,本文简单介绍有关计算模型[1-10],将其归纳为以下几类:

表1膝关节传力机制模型的分类简介
根据以上文献,可了解到膝关节受力和运动的特点:膝关节传力结构十分复杂,不是单靠骨骼传力,而是靠骨骼、韧带和肌肉的协同作用[2][3];髌骨在运动时的轨迹不是作节点固定轴的转动,而是复杂变化的瞬心螺旋型的空间运动曲线[4][5];膝关节运动时韧带具有重要作用,在运动不当时很容易受伤,因此应该加强保护[6][7];屈曲运动时,股骨在关节接触面相对胫骨产生后移,使上下传力产生偏心,因此产生弯矩,造成其接触面应力分布不均匀,在走台阶时,其最大峰值会比平均应力大十余倍,也许这是膝关节软骨容易磨损的重要原因[8][9][10][11]。
2 已上市专利产品存在的共性问题
目前市面上已经有德国、美国以及我国自己的专利产品(见图2)。它们的构造大致相同,即在膝盖处设置固定轴,连接上下助力杆,它们分别用活动绑带固定在大小腿部。这类专利产品存在一些共性问题:①没有考虑患者膝关节运动受伤的具体情况,而是设计了一种固定的轴心连杆形式,由上述介绍可知,膝关节的运动模式并非是一个简单的伸屈运动,而是一个兼有伸屈、滚动、滑动、侧移和轴位旋转的复杂的多自由度的运动模式。它并非围绕着同一个固定的中心旋转,而是在运动过程中产生多个瞬时旋转中心。这种将旋转中心固定的助力器产品,对关节的保护都会产生副作用,因为外置的连杆轴心不可能和人体膝关节运动弯曲时的瞬时旋转中心总是重合,可能会加重伤情。②没有考虑如何设法减少偏心影响和应力峰值增加,膝关节在伸屈运动时,股胫力线的作用点会向后侧偏移,产生了向后侧偏心,当屈曲大于90度以上时还会向内侧偏移,并使接触面减少,使膝关节受到轴向应力和力矩双重作用,其结果是股胫关节接触面减少,应力增加。因为应力分布不均匀而产生峰值,从而导致膝关节受伤。③没有专门考虑对韧带保护措施,如施加预应力使其运动时拉力减少等,而一般膝关节助力器在安装时并不受力,要等走路和上台阶时,才通过股骨、胫骨之间的张力带的摩擦力,依靠连杆和转轴传递部分重力,在膝关节伸屈、内旋、外旋运动时相应韧带就会受到牵拉,当以上运动速度过快、用力过猛时,会导致韧带瞬间拉力过大而拉伤,使关节受力失去平衡,进一步导致半月板或韧带受伤,因而膝关节保护器应该考虑对韧带的保护。④没有考虑运动中各种韧带拉力的变化,无法进行有针对性的预张力的调节;膝关节在伸屈不同角度时,前后交叉韧带张力会产生相反方向变化,在内外翻时,内外侧副韧带受力也会产生相应变化,当单向变化过大就会使某一处韧带以及相应关节组织受伤,因为没有考虑到这种受力变化,也就无法对膝关节进行有针对性的预调节保护。⑤没有预警控制,腿上的张力带松紧较难控制,且不知道带多长时间会影响血液流通,而使腿部肌肉受到伤害,而需控制在一定时候放松几分钟再用。

图2各种膝盖助力器专利产品示意图
3 一种新的膝关节助力器改进建议
3.1 一种新的膝关节助力器的构造说明
我们在研究了膝关节传力机理的基础上,针对现有膝关节助力器的问题,特设计了一种新的膝关节助力器(详见图3),具体构造说明见图3、4所示,其包括固定在中间膝关节部位的保护垫(1),在保护垫外侧设置了一个孔(9)以利髌骨活动和散热,设于股骨下段和胫骨上段的多个张力圈(12-17),对称设置在股骨两侧的上助力杆(4)和对称设置在胫骨两侧的下助力杆(5),其上助力杆一端通过滑动铰(10)活动连接在所述保护垫上,另一端铰接(19)在股骨处最上端的张力圈上,当下肢运动时,滑动铰会左右滑动,以使上下腿弯曲时传力流畅,其偏心距也会相应产生变化,这样也可更加适应膝关节在运动时,其旋转中心的变化,使在任何情况下都能够部分补偿胫股间力线产生的向内偏心;其下助力杆一端通过固定铰(11)连接在中间保护垫上,另一端铰接(19)在胫骨处最下端的张力圈上,所述滑动铰和固定铰间设置一个偏心距e,使行走伸屈运动时,膝关节处的股胫间传力处,产生一个向前的反向偏心力矩,以抵消部分膝关节伸屈运动时,产生的股骨胫骨间传力线向后偏心的影响,使股骨胫骨间的接触面应力分布更均匀。它在连接保护垫上下的张力圈之间设置一对斜向拉力弹簧(2、3),并在其下方的保护垫相应处设置了加劲片(6、7),安装时先对拉力弹簧按需要进行预牵张,使膝关节处于预张力状态,当膝关节伸屈运动时,外侧弹簧进一步拉紧,内侧弹簧放松,给膝关节增加了一个反向力矩,从而使韧带的最终拉力减少,起到保护韧带不被拉伤的作用。它在助力杆与张力圈交叉处设有套箍(18),助力杆和张力圈分别穿过套箍,并可相互自由滑动。在保护垫内侧还设有智能预警装置(21),包括用于监测膝关节处温度的温度传感器,蓝牙传输单元,和用于处理温度传感器获得数据的微型处理器,以及三轴加速度传感器,它们可通过蓝牙传输单元,将设定的有关控制数据传送至手机客户端,超过阈值则发送警报至手机客户端,从而提醒使用者需要松开张力圈,避免因张力圈太紧或者时间太久,造成散热不良而使肌肉肿胀发热、血液阻滞等问题。

图3膝盖运动助力器构造示意图
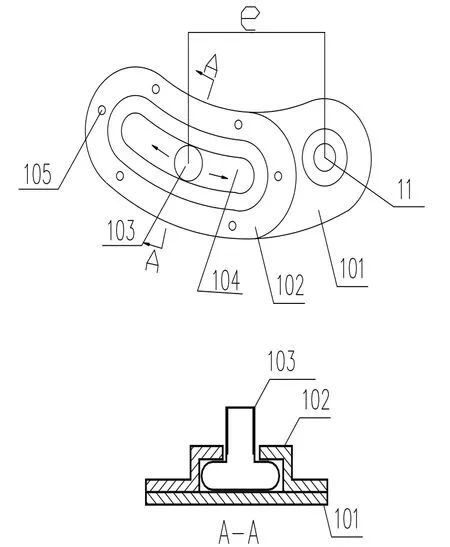
图4滑动铰和固定铰偏心连接示意图
3.2 一种新的膝关节助力器的特点
它同样包括固定在中间膝关节部位的保护垫,在股骨下段和胫骨上段设置了多个张力圈,以便将部分力传递到助力器,在股骨两侧对称设置了上助力杆和在胫骨两侧的对称设置了下助力杆,它们一端都铰接在上下张力圈,但其特征之处在于:将上助力杆连接在保护垫下端的固定铰改为滑动铰(图4);其中下助力杆的上端,通过固定铰连接在中间保护垫上,其下端铰接在胫骨处最下端的张力圈上,在保护垫上的滑动铰和固定铰间设置了一个偏心距e(图4),使行走伸屈运动时,膝关节处的股胫间传力处,产生一个向外的反向偏心力矩,补偿股骨胫骨间传力线向内侧偏心的影响,使股骨胫骨间的接触面应力分布更均匀。
将其中一个固定铰改为滑动铰,据下肢运动特性,滑动槽设置成向上凹的弧形槽(图4),当下肢运动时,滑动铰会左右滑动,使上下腿弯曲时传力流畅,其偏心距也会相应产生变化,这样可更加适应膝关节在运动时,其旋转中心的变化,使在任何情况下都能够部分补偿胫骨股骨间传力线产生的向内侧偏心。
在与保护垫连接的上下张力圈之间设置一对斜向拉力弹簧,它们分布在上下助力杆两侧,两端和张力圈铰接;并安装时先对拉力弹簧按需进行预牵张,使膝关节处于预张力状态,当伸屈运动时,外侧弹簧进一步拉紧,内侧弹簧放松,又给膝关节增加了一个反向力矩,并使韧带的最终拉力减少,起到保护韧带不被拉伤的作用。并在弹簧下设置了加劲片,以减少在弹簧预张拉时保护垫的变形。
在保护垫上还设有智能预警装置,它包括安装在膝关节内侧,用于监测膝关节处温度的温度传感器,蓝牙传输单元,及用于处理温度传感器获得数据的微型处理器,所述微型处理器通过蓝牙传输单元将温度传感器获得的温度数据传送至手机客户端;通过温度传感器获知膝盖内侧的温度是否超出设定阈值,超过阈值则发送警报至手机客户端,从而提醒使用者需要松开张力圈,避免因张力圈太紧或者时间太久,造成散热不良而使肌肉肿胀发热、血液阻滞等问题。
其智能预警装置内还设有三轴加速度传感器,它与微处理器信号连接;通过三轴加速度传感器获取人物运动时的加速度数据,判断患者是否已佩戴运动保护器开始行走,并通过微处理器发送数据至手机客户端,使其开始计时,当计时超过设定阈值时,通过手机客户端发出警报声或者振动方式提示警告,可避免因张力圈束绑时间太久,造成散热不良而使肌肉肿胀发热、血液阻滞等问题。
4 发展前景
一直以来,治疗和保护膝关节的手段,除药物以外,一个是采用人工关节,另一个是外用支撑或者外用护膝类的助力器,前者要动大手术,时效长且有较大风险;而外用支撑会影响生活质量,用一般助力器效果有限,若应用不当,反而会伤害膝盖。因此本研究根据对膝盖的生物力学分析,提出了改进方案,初步应用了人工智能元件进行监测控制。考虑到近几年来国内外大数据和人工智能应用范围的开拓,已有不少文献介绍了人工智能在外置下肢康复机械的研究[12-14],这些外置下肢康复机械,虽然效果不错,但是使用很不方便,会影响生活质量,因为市场上缺少一种方便有效的膝盖助力器,所以还有不少人正在积极研究。本研究现在是起步阶段,后期可以借鉴人工智能技术在服装中的应用技术[15-16],比如上述文献中介绍了智能服装的发展分为3个阶段,第1阶段是将电子器件附加在服装上,第2阶段是将电子器件嵌人服装内,第3阶段是服装本身将成为电子器件。本研究后期可以借鉴它第1阶段外置的温度传感器、湿度传感器和应变传感器,设置在膝盖助力器的外表,用于测试和信号传递。进一步可以模仿智能服装将电子器件的纤维化,然后制作在助力器连接布料内部,还可以借鉴智能服装应用的热响应变形材料,制作固定绑带,当绑带太紧、时间太长而发热,使患者不舒服时,传感器会将信号传给,由热响应变形材料制作固定绑带,使其自动放松到舒适的程度;还可借鉴智能服装上自带的太阳能发电和摩擦发电装置,解决电源问题等等。对此发展前景较为乐观。本文提出的助力器方案,最大的优点是性价比高,而且穿戴使用较方便,这是目前文献中未提及的,但是结合运用有关人工智能技术尚在探索中。
