连续极永磁直线同步电机定位力和推力波动抑制研究
2022-09-26黄旭珍
胡 源 李 静 黄旭珍
连续极永磁直线同步电机定位力和推力波动抑制研究
胡 源 李 静 黄旭珍
(南京航空航天大学自动化学院,南京 210016)
永磁直线同步电机(PMLSM)具有推力密度高、效率高、无中间传动机构等优点。PMLSM通常采用N-S极永磁体(PMs),但当长行程电机使用大量PMs时,存在成本高的缺点。针对自动化生产线,提出一种新型模块化连续极PMLSM方案,适用于负载变化范围不大的应用场合。采用有限元法对连续极PMLSM的电磁特性进行仿真分析。通过优化永磁体尺寸参数,分析极弧系数和永磁体厚度对电机电磁特性和推力特性的影响。提出四段式模块化拓扑,并建立相应的分段函数模型,从而消除端部力的基波和奇数次谐波,抑制定位力和推力波动。
连续极;定位力;有限元法;直线电机;模块化;永磁电机;推力波动
0 引言
永磁直线同步电机(permanent magnet linear synchronous motor, PMLSM)以其高效率、高功率密度[1-2]而在高性能驱动领域得到了广泛应用。尤其是近年来,物流运输和自动化生产行业对PMLSM的需求越来越大[3]。然而,经过21世纪早期的永磁体(permanent magnets, PMs)短缺危机后,学者们一直致力于降低永磁体用量以降低永磁电机成本。所以,连续极电机得到了越来越广泛的关注[4]。与传统的N-S极电机相比,连续极电机用铁极和永磁体交替排列进行励磁,可以有效地减少永磁体用量。
目前连续极结构已应用到多种类型的电机中,如磁通开关电机、磁悬浮电机、磁通反向电机等。在连续极结构电机中,每对极由一个永磁体磁极与一个铁极组成。在这种情况下,铁极中呈现出与永磁体磁性方向相反的磁性。目前,有研究团队对比了分数槽集中绕组永磁同步电机的两种不同拓扑结构,即贴面式转子和连续极转子[5]。研究结果显示,连续极转子与贴面式转子永磁同步电机在额定状态下的性能几乎相同。比较效率图可知,连续极转子的拓扑结构在连续功率特性方面更出色。连续极结构在弱磁场控制时还可以有效拓展恒功率运行范围。然而,连续极结构也具有难以忽视的缺点,例如其带来的不对称气隙磁通密度会导致严重的端部磁化、偶数次反电动势谐波。
连续极PMLSM除了具备连续极本身的优缺点外,还具备直线电机特殊的开断铁心结构带来的特有的端部效应[6]。PMLSM的齿槽效应和端部效应分别会带来齿槽力和端部力,这两种力耦合在一起,形成定位力。定位力和三相电感的不平衡[7]是永磁直线同步电机获得较高精度的主要障碍。学者们最常采用控制算法消除三相电感不平衡[8],但是控制算法过于复杂,所以最好通过优化设计来抑制定位力。定位力会带来电机的推力波动,因此需要深入研究这种力,对电机结构进行优化设计,通过削弱定位力来抑制推力波动。
目前,学者们对降低电机推力波动的方法进行了大量研究,包括斜槽[9]、优化槽口[10]、优化极弧系数[11]或极槽配合[12-15],每种方法都可以降低齿槽力。针对直线电机的开断铁心结构,可以通过优化铁心长度[16]或优化端齿宽度或槽宽等措施来削弱端部效应。有研究采取磁极错位与V型磁极相结合的优化方法改善推力波动[17]。还有一种优化方式是采取模块化结构,通常用于抑制各种电机感应电动势中的高次谐波[18-19]。有研究团队提出将初级铁心模块化并结合分数槽的方式,抵消各初级模块的阻力,抑制定位力及推力波动[20]。
采用连续极永磁直线同步电机(consequent- pole permanent magnet linear synchronous motor, CP- PMLSM)代替N-S极永磁直线同步电机(N-S permanent magnet linear synchronous motor, NS- PMLSM),可以降低电机次级的加工成本。然而,与传统的NS-PMLSM不同,CP-PMLSM的端部力变化特性分析复杂,难以抑制。由于以往研究的模型和抑制方法不适用于CP-PMLSM,故本文深入分析CP- PMLSM端部定位力的波动规律,建立CP- PMLSM的准确模型,揭示其周期性和不对称性,并提出初步的分段设计方法,以及抑制端部定位力的方法。
1 PMLSM仿真模型
图1所示为CP-PMLSM与NS-PMLSM的结构对比,二者区别主要在于次级,CP-PMLSM结构将磁极与铁极交替排列,在长行程长次级电机的应用中显然可以比NS-PMLSM结构节省永磁体。
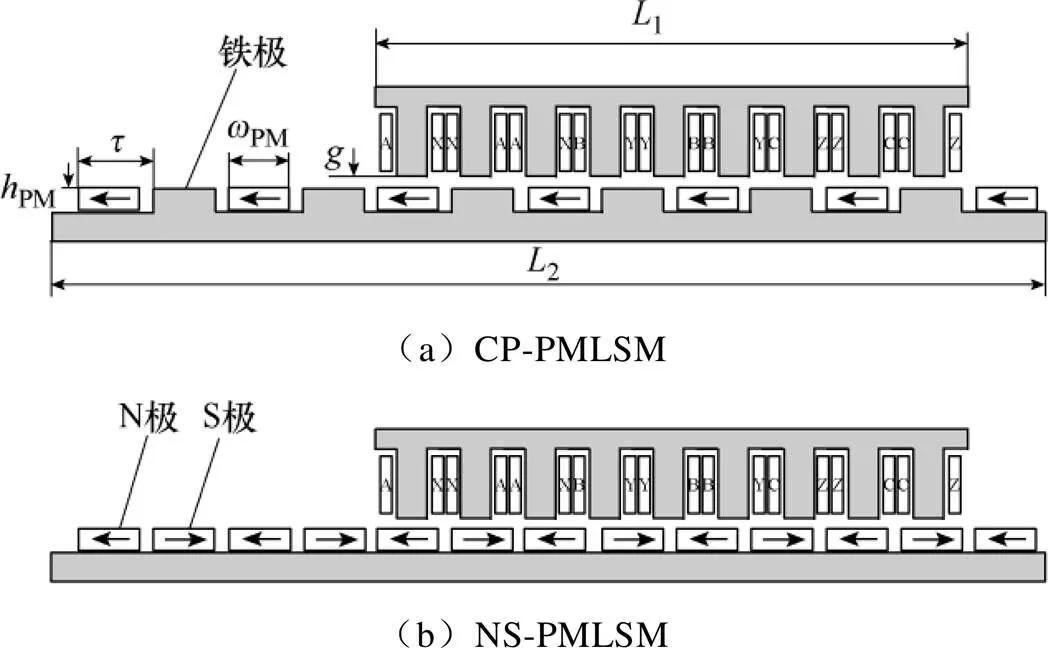
图1 电机结构
本文所建立的永磁直线同步电机是一种单边平板型电机。绕组设置在初级作动子,永磁体设置在次级作定子。电机设计要求的剩磁比较大,所以选择钕铁硼永磁体。定子铁心是磁路的重要组成部分,应选用高磁导率的材料,本文采用冷轧硅钢片DW315—50。
在电机设计的早期阶段,进行电机的磁路设计,获得电机的初级、次级和绕组的相关初始参数。在此基础上,建立永磁直线同步电机的有限元模型。本文设计的电机极槽配合为8极9槽,采用短初级长次级结构,具体仿真模型参数见表1。

表1 仿真模型的参数
若NS-PMLSM与CP-PMLSM的参数相同,采用连续极结构可以在推力达到N-S结构的84%的情况下节省50%的永磁体用量;若NS-PMLSM与CP-PMLSM采用表1中的参数设置,两者输出的推力几乎相等,且CP-PMLSM所需的永磁体用量只占NS-PMLSM永磁体用量的83%。
在对建立的短初级永磁直线同步电机进行空载分析时,三相绕组设置加载激励的电流均为0;进行负载分析时,三相绕组加载有效值为3A、频率为1 000/10.08Hz的三相交流电。
2 永磁体优化设计
2.1 极弧系数优化分析
极弧系数是影响永磁电机性能的重要因素,可定义为永磁体宽度与极距的比值。
如果调整极弧系数,电机的气隙磁通密度就会发生相应的变化,从而引起纹波推力的变化;永磁体与定子齿槽的对应位置会发生变化,从而导致槽的阻力发生变化;每对磁极下的平均磁通量将发生变化,从而导致平均推力的变化。因此,极弧系数对永磁电机的推力特性有重要影响,需要对其进行优化。
在其他电机性能参数不变的情况下,通过改变永磁体的宽度来改变电机的极弧系数,观察电机的推力性能变化。将极弧系数从0.60调整到0.90,变化步长为0.05进行模拟,仿真结果见表2。推力波动定义为

表2 极弧系数对推力特性的影响
从表2可以看出,推力均值随极弧系数增加呈上升趋势,而推力波动和定位力都呈现一种先增后减的趋势,在极弧系数为0.80时达到极小值。极弧系数对推力均值、推力波动和定位力的影响如图2所示。
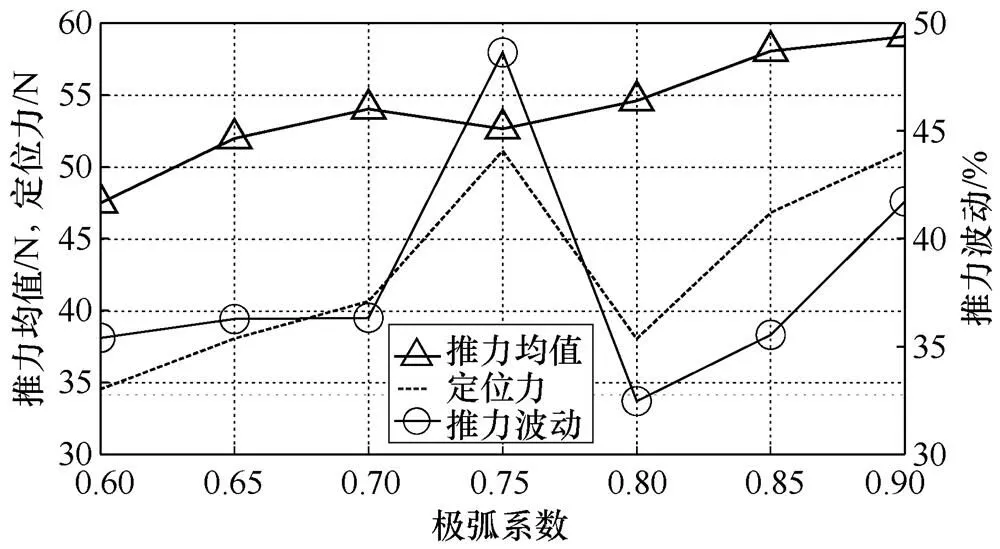
图2 极弧系数对推力均值、推力波动和定位力的影响
从图2可以看出,随着极弧系数的增大,电机的平均推力呈增大趋势,而推力波动和定位力均在极弧系数为0.80时达到最小值。但考虑永磁体的制造成本,可以发现极弧系数为0.65~0.70时的定位力与极弧系数为0.80时的定位力相差不大。仿真结果表明,当极弧系数为0.68时,推力波动为36.51%,定位力为40.881 0N。
为了进一步比较极弧系数为0.68和0.80的优劣,继续比较两种情况下电机的气隙磁通密度,如图3所示。可以看出,PMLSM的气隙磁通密度接近正弦。因此,在这种情况下,两者的平均推力和推力波动相差不大。考虑到电机的制造成本,初步选择永磁体宽度为6.9mm比较合适,即极弧系数为0.68。
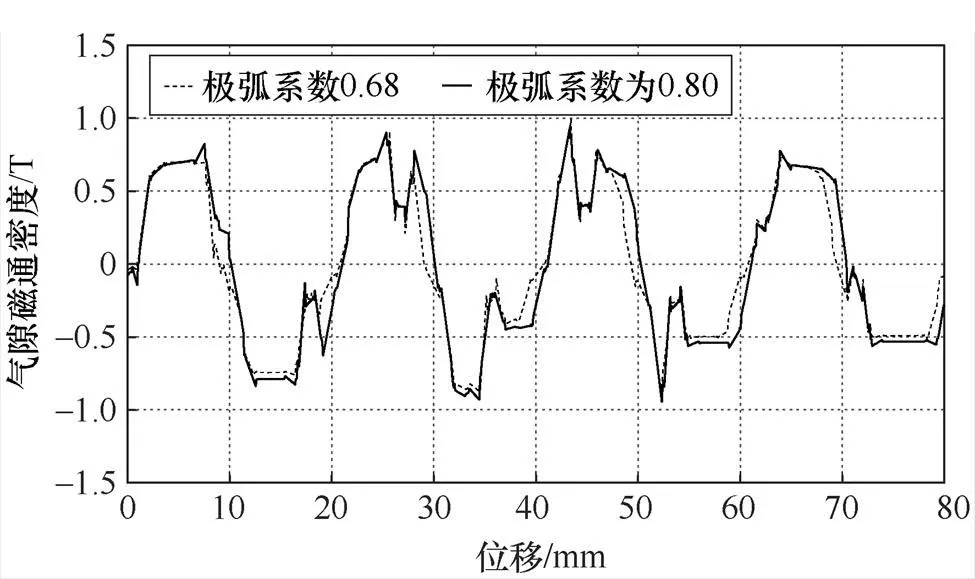
图3 极弧系数为0.68与0.80时电机的气隙磁通密度
2.2 永磁体厚度优化分析
永磁同步电机的磁场主要是由电机的永磁体产生的。永磁体在磁化方向上的厚度是影响电机电枢电抗和励磁电势的重要因素,通过磁路设计和分析可知,电枢电抗会影响直线电机的定位力。因此,本节内容通过仿真计算,观察永磁体厚度变化对电机定位力的影响。
本文将永磁体的厚度从2.0mm变化到4.0mm,以0.5mm为间隔进行模拟,有限元分析结果见表3。
从表3可以看出,随着永磁体厚度的增加,电机的平均推力逐渐增加,推力波动和定位力逐渐增大。
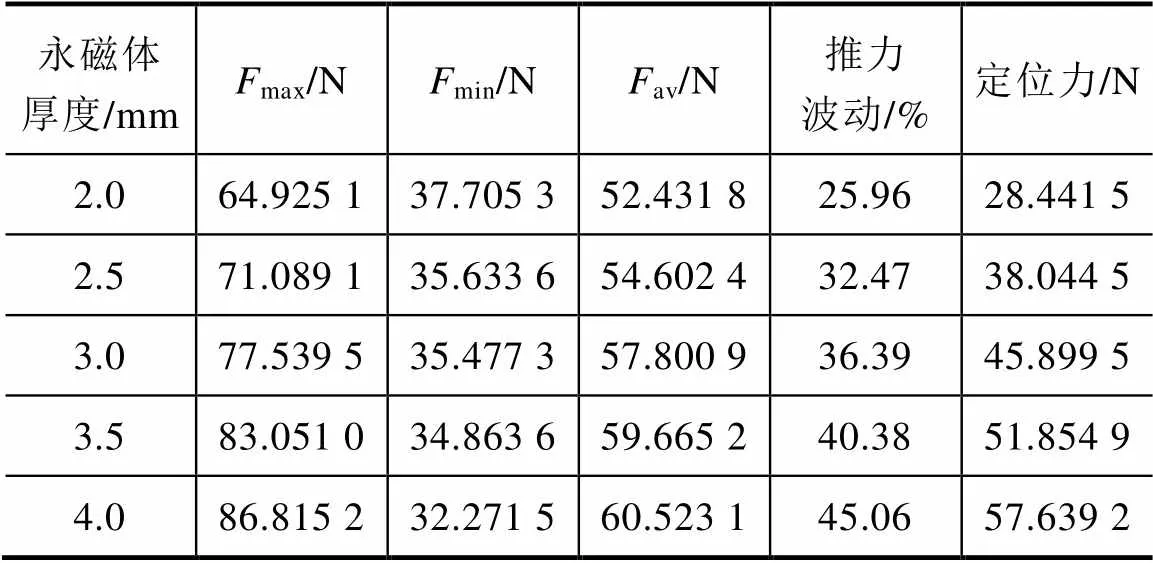
表3 永磁体厚度对推力特性的影响
图4为不同永磁体厚度下电机的气隙磁通密度。从图4可以看出,电机气隙磁通密度随永磁体厚度的增加而增大。而永磁体太薄容易发生退磁[21],所以综合考虑平均受力、退磁等原因,永磁体厚度选用2.5mm。

图4 不同永磁体厚度下电机的气隙磁通密度
由此可以推断,改变定子齿槽与永磁体的相对位置可以减小电机的定位力,而永磁体厚度带来的磁场强弱变化较小。所以可以进一步采取倾斜槽、优化槽口或极槽配合结构等方式进一步减小电机的定位力,这值得后续进一步研究。
3 四段式模块化结构
由于前两部分的优化设计不能显著降低推力波动,考虑到直线电机端部力的影响,采用模块化设计。模块化设计是降低永磁直线电机端部力的有效措施,且应具有周期性对称性,而CP-PMLSM具有明显的端部力不对称性。

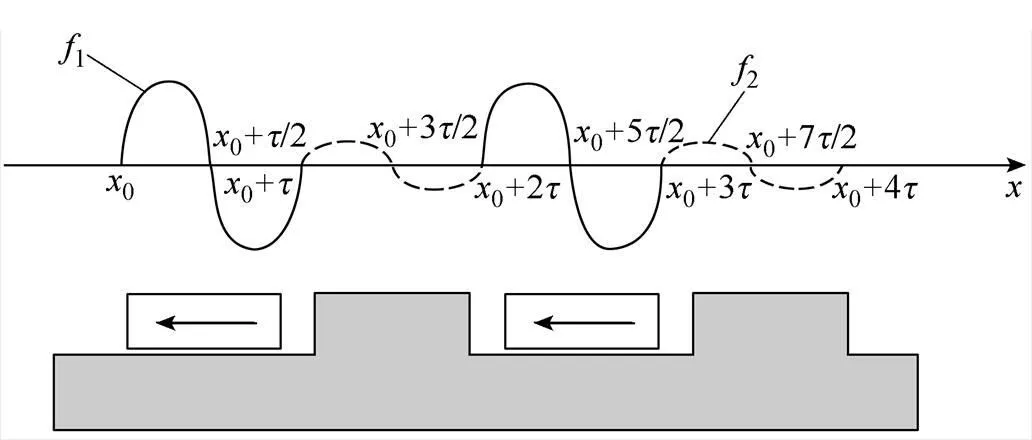
图5 CP-PMLSM产生的两种端部力波形
因此,本节将从端部力的对称性开始研究。在实现端部力对称后,利用模块距离使端部力具有反相位,从而消除基波和部分谐波,使端部力显著 减小。
3.1 端部力周期性对称设计
进行模块化设计之前,首先应将端部力从不对称调整为周期对称。本文提出两种周期对称结构,运用不同的模块距离将端部力调整为不同的对称 方式。

(2)


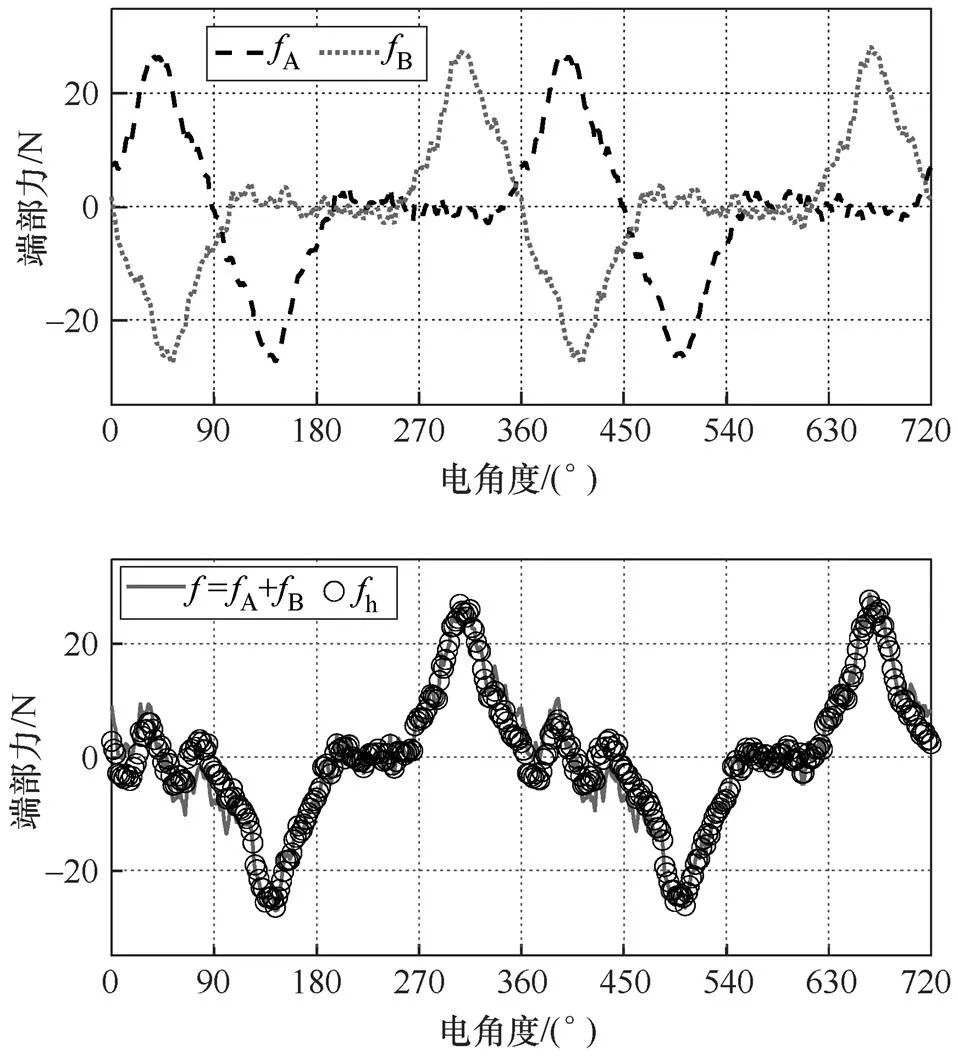
图7 第一种端部力对称设计仿真结果(,)

图8 周期为的周期对称结构
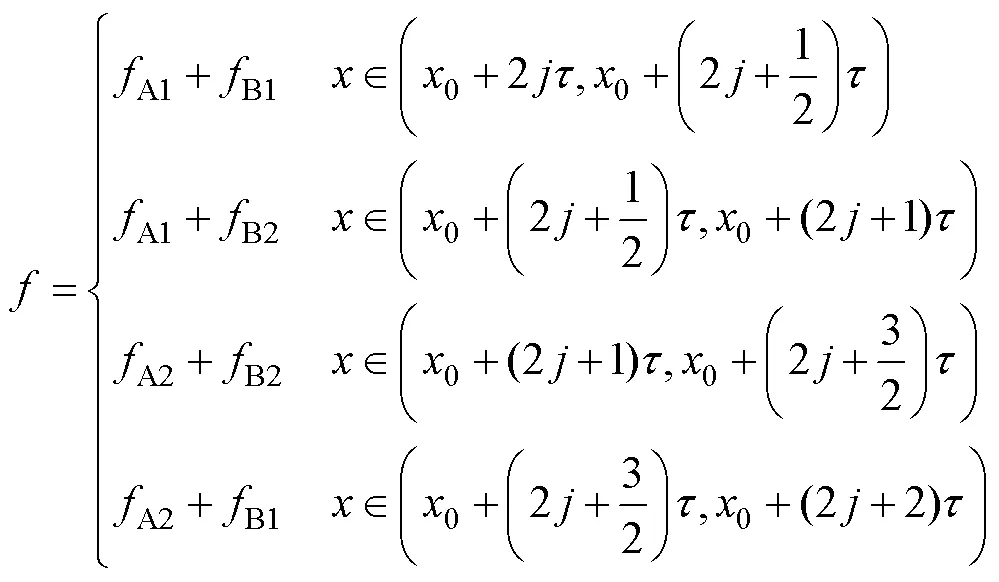
该设计端部力函数为


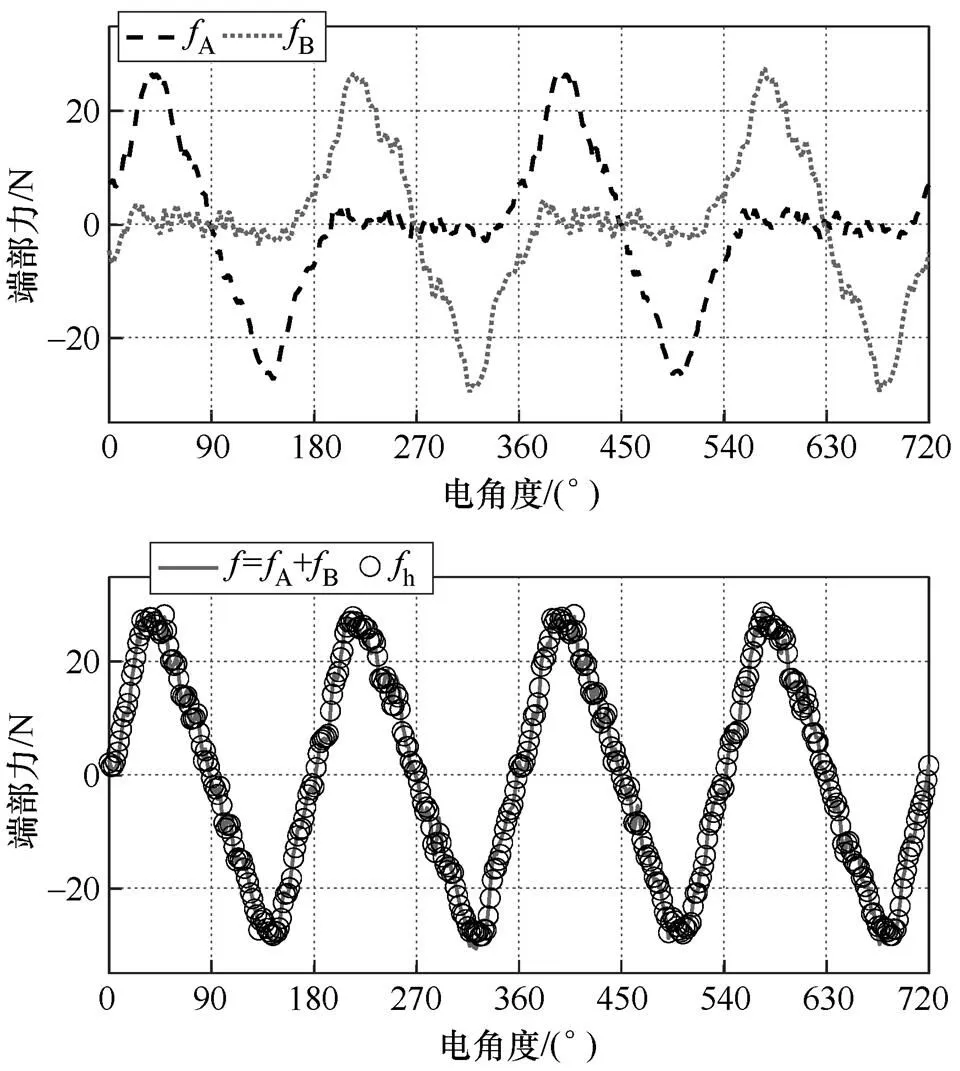
图9 第二种端部力对称设计仿真结果(,)
3.2 端部力调相设计
完成对称设计后,利用适当的模块距离使端部力具有反相位,以抵消基波和奇次谐波。反相位设计结构如图10所示。

图10 反相位设计结构


图11 反相位设计仿真结果
端部力得到抑制后,通入额定电流3A,电机推力波动下降到2.41%。而由于四段模块推力的叠加,模块化后的推力均值可达213.9N,极大地提升了电机性能。通入不同大小的电流时,电机的推力波动如图12所示。
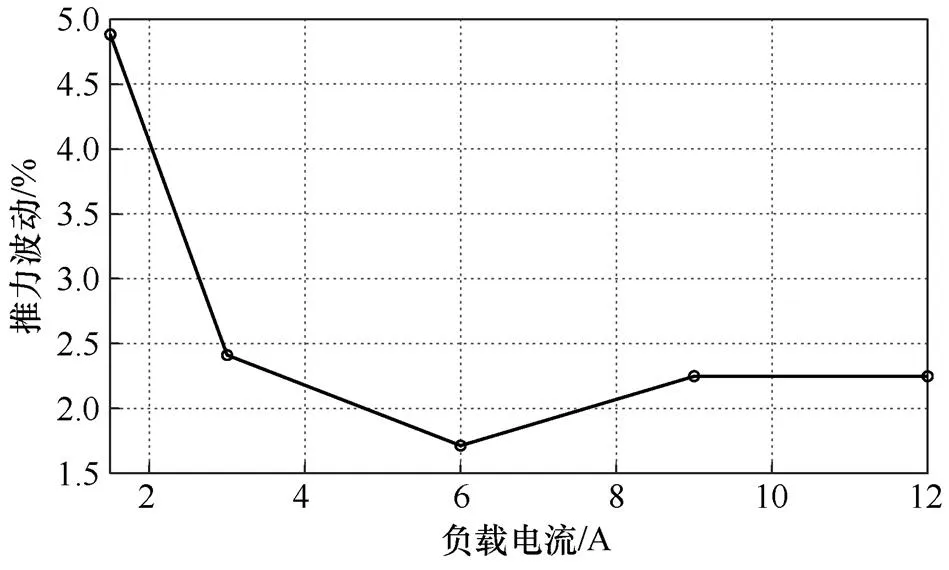
图12 不同负载电流时的推力波动
由图12可知,通入不同大小的负载电流时,随着负载电流的增大,推力波动呈减小趋势,在负载电流为6A时达到极小值,随后上升到2.25%左右并趋于稳定。由此可知,模块化后的推力波动得到较好抑制。
4 结论
与NS-PMLSM相比,CP-PMLSM可以显著地减少永磁体用量,极大地降低成本,尤其在长行程电机中,这种优势更为明显。通过选择合适的极弧系数和永磁体厚度,本文对电机进行了尺寸参数优化,然后对电机进行了模块化设计来克服直线电机的端部力,最后建立分段函数模型,将两种端部力进行对称设计后,再通过反相位设计消除电机的基波和奇数次谐波,从而降低电机的端部力,提升了电机性能。后续将对连续极电机气隙磁场谐波进行分析,并比较不同极槽配合模块化CP-PMLSM。
[1] CHAPPUIS B, GAVIN S, RIGAZZI L, et al. Speed control of a multiphase active way linear motor based on back EMF estimation[J]. IEEE Transactions on Industrial Electronics, 2015, 62(12): 7299-7308.
[2] 张圳, 王丽梅. 永磁同步直线电机自组织概率型模糊神经网络控制[J]. 电气技术, 2020, 21(12): 1-5.
[3] 张育增, 周睿智, 李帅. 永磁同步直线电机模糊滑模速度控制研究[J]. 电气技术, 2020, 21(12): 23-29.
[4] KWON Y S, KIM W J. Detent-force minimization of double-sided interior permanent-magnet flat linear brushless motor[J]. IEEE Transactions on Magnetics, 2016, 52(4): 8201609.
[5] CHUNG S U, KIM J W, CHUN Y D, et al. Fractional slot concentrated winding PMSM with consequent pole rotor for a low-speed direct drive: reduction of rare earth permanent magnet[J]. IEEE Transactions on Energy Conversion, 2015, 30(1): 103-109.
[6] KARIMI H, VAZE-ZADEH S, SALMASI F R. Com- bined vector and direct thrust control of linear induction motors with end effect compensation[J]. IEEE Transactions on Energy Conversion, 2016, 31(1): 196-205.
[7] 张春雷, 张辉, 叶佩青, 等. 两相无槽圆筒型永磁同步直线电机电感计算与分析[J]. 电工技术学报, 2021, 36(6): 1159-1168.
[8] 张邦富, 程明, 王飒飒, 等. 基于改进型代理模型优化算法的磁通切换永磁直线电机优化设计[J]. 电工技术学报, 2020, 35(5): 1013-1021.
[9] JANG S M, SEO J C, YOU D J, et al. Characteristic analysis of disk type PMLSM with/without skew[C]// 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 2005: 270-275.
[10] HAO Li, LIN Mingyao, XU Da, et al. Cogging torque reduction of axial-field flux-switching permanent magnet machine by rotor tooth notching[J]. IEEE Transactions on Magnetics, 2015, 51(11): 8208304.
[11] LIU Xiao, GAO Jian, HUANG Shoudao, et al. Magnetic field and thrust analysis of the U-channel air-core permanent magnet linear synchronous motor[J]. IEEE Transactions on Magnetics, 2017, 53(6): 8201504.
[12] HUANG Xuzhen, TAN Qiang, WANG Qinglong, et al. Optimization for the pole structure of slot-less tubular permanent magnet synchronous linear motor and segmented detent force compensation[J]. IEEE Transa- ctions on Applied Superconductivity, 2016, 26(7): 0611405.
[13] LI Liyi, HUANG Xuzhen, PAN Donghua, et al. Magnetic field of a tubular linear motor with special permanent magnet[J]. IEEE Transactions on Plasma Science, 2011, 39(1): 83-86.
[14] SATO K. Thrust ripple reduction in ultrahigh- acceleration moving permanent-magnet linear syn- chronous motor[J]. IEEE Transactions on Magnetics, 2012, 48(12): 4866-4873.
[15] ZHOU Gan, HUANG Xueliang, JIANG Hao, et al. Analysis method to a halbach PM ironless linear motor with trapezoid windings[J]. IEEE Transactions on Magnetics, 2011, 47(10): 4167-4170.
[16] MA Mingna, LI Liyi, ZHANG Jiangpeng, et al. Analytical methods for minimizing detent force in long-stator PM linear motor including longitudinal end effects[J]. IEEE Transactions on Magnetics, 2015, 51(11): 8204104.
[17] 兰志勇, 谢斌, 祝涤非, 等. 基于V型三段磁极错位削弱永磁直线电机推力波动的方法[J]. 电工技术学报, 2021, 36(16): 3474-3482.
[18] CAO Ruiwu, CHENG Ming, HUA Wei. Investigation and general design principle of a new series of complementary and modular linear FSPM motors[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5436-5446.
[19] XU Liang, ZHAO Wenxiang, JI Jinghua, et al. Design and analysis of a new linear hybrid excited flux reversal motor with inset permanent magnets[J]. IEEE Transactions on Magnetics, 2014, 50(11): 8202204.
[20] BAI Yinru, YANG Tianbo, KOU Baoquan. Reducing detent force and three-phase magnetic paths unbalance of PM linear synchronous motor using modular primary iron-core structure[C]//2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 2014: 1743-1748.
[21] 沈燚明, 卢琴芬. 初级励磁型永磁直线电机研究现状与展望[J]. 电工技术学报, 2021, 36(11): 2325- 2343.
Research on detent force and thrust ripple suppression of consequent-pole permanent magnet linear synchronous motor
HU Yuan LI Jing HUANG Xuzhen
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016)
Permanent magnet linear synchronous motor (PMLSM) has the advantages of high thrust density, high efficiency and no intermediate transmission mechanism. Usually, PMLSM uses N-S pole permanent magnets (PMs), which, however, has the disadvantage of high cost when motor with long stroke uses a large number of PMs. Oriented to automated production lines, a new continuous pole modular PMLSM scheme is applied for applications where the load variation range is not large. The electromagnetic characteristics of consequent-pole PMLSM are simulated by finite element method. By optimizing the size parameters of permanent magnet, the influences of the pole arc coefficient and the thickness of permanent magnet on the electromagnetic characteristics and thrust characteristics of motor are analyzed. In order to eliminate the fundamental and odd harmonics of end force and suppress the detent force and thrust ripple, a four-stage modular topology is proposed and a corresponding piece level function model is established.
consequent-pole; detent force; finite element method; linear motor; modularization; permanent magnet motors; thrust ripple
2022-03-18
2022-05-09
胡 源(2001—),女,江苏省盐城人,本科,主要从事直线电机分析与控制方面的研究工作。
省级大学生创新创业训练支持项目(202110287018Y)
