相控阵系统二维波束扫描方法和系统设计*
2022-09-24张业斌
张业斌,张 国,王 凯
(1.中国电子科技集团公司第三十八研究所,安徽 合肥 230088;2.安徽省天线与微波工程实验室,安徽 合肥 230088)
0 引言
基于移相器的传统相控阵雷达、通信、电子战等电子信息系统由于在宽的瞬时工作带宽内存在波束倾斜[1-2],因此限制了系统的工作带宽。随着微波光子技术的发展,越来越多基于光子技术的系统和模块被提出,来解决相控阵系统中的一些问题,从而实现系统性能的提升,其中,光控波束形成因其工作带宽大、抗电磁干扰、轻量化等优势得到了广泛的关注和研究[3-6]。大量的基于不同原理的光控波束形成方法和系统[7-13]被提出。
近年来,随着光子集成技术的发展,波束形成芯片[14-17]被提出。波束形成芯片在体积和重量上相对于分期器件构建的波束形成系统优势明显,但是由于目前芯片的延时损耗和耦合损耗相对还较高,特别是在系统规模较大时,片上波束形成系统的技术指标还较难满足实际应用的需要。在相控阵系统中,阵面规模和系统的工作频段决定了扫描波束宽带,而波束宽度越小,系统的指向角度分辨率就越高。增加相控阵天线阵面的规模可以减小扫描波束的宽度,然而系统的阵面越大、天线单元数目越多,光控波束形成网络的设计就越复杂,相应的设备量也就越多。目前,大多数光控波束合成方法为一维的光控相控阵,但在雷达、通信、电子战等实际应用中,对二维波束形成能力的需求也十分急切。
1 二维延时独立扫描理论与设计
对于相控阵雷达系统,延时单元数量正比于天线单元数量,这增大了大规模延时网络的设计难度。可以基于两方面降低延时网络的设计复杂度:一方面,使用两个独立角度(α,β)来描述波束指向,然后分别独立计算相邻行和列单元延时,避免通过方位角φ和俯仰角θ描述波束指向时,造成行和列单元延时计算时的相互影响,即通过降低扫描波束的冗余度来降低延时线设计的复杂度;另一方面,设计行与列方向的总延时和延时步进相同,二维阵面各通道的绝对延时是中心对称形式,因此可以设计一种适用于所有天线单元的延时网络,该网络采用通用的通道延时设计,有利于规模化批量生产。
如图1 所示,设天线单元在yOz平面按等间距矩形格阵排列。
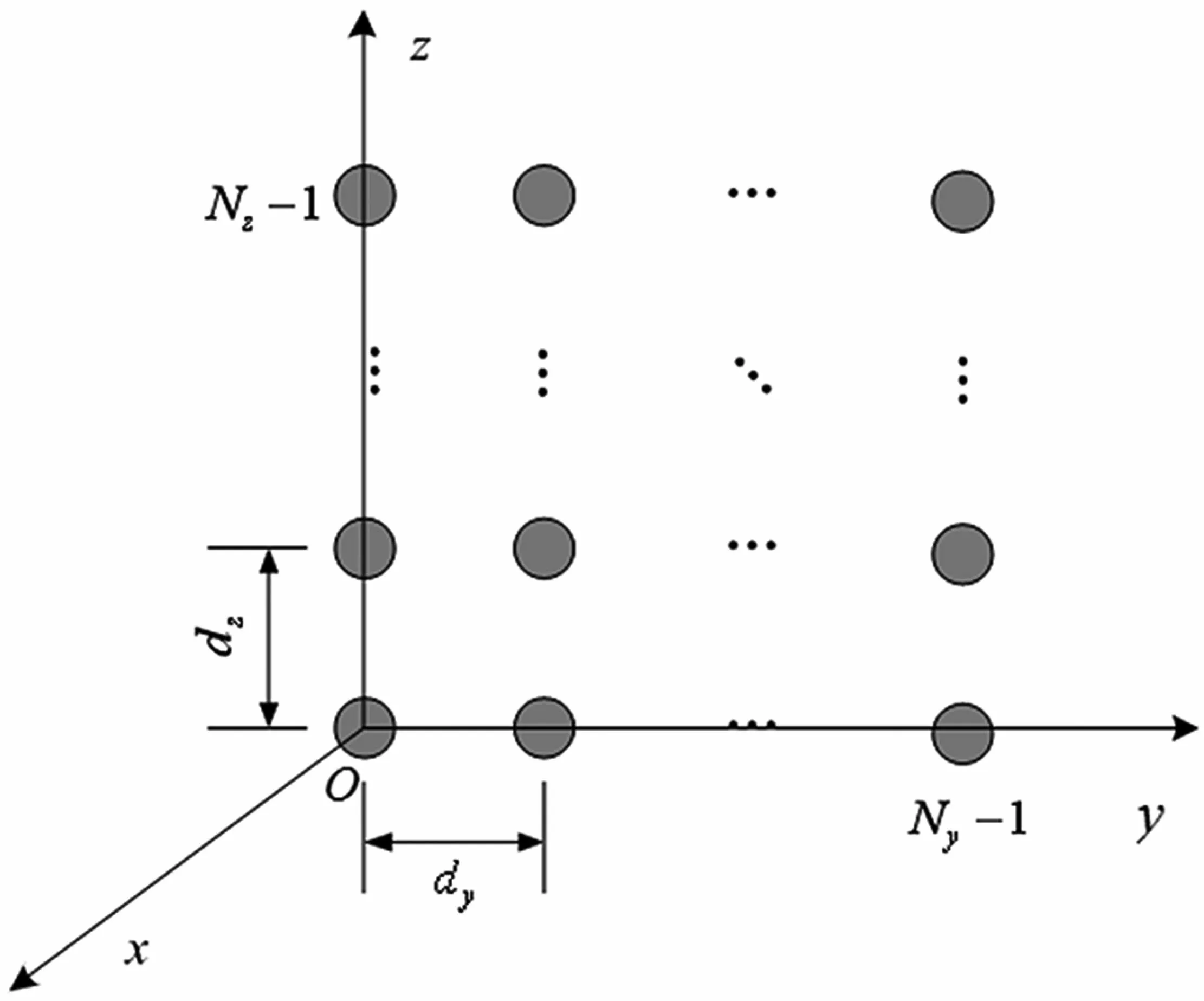
图1 天线单元排列
假设图1 中共有Nz×Ny个天线单元,单元间距分别为dz与dy。首先使用两个不同角度(α,β)来描述波束指向;其次计算相邻行(列)单元延时。α是波束指向与z轴夹角,β是波束指向与y轴夹角,相邻行(列)单元延时为:
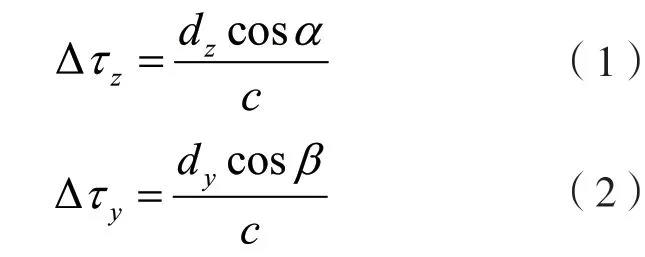
式中:dy和dz分别为行列天线单元间距;c为光速。故平面相控阵天线方向图函数可表示为:
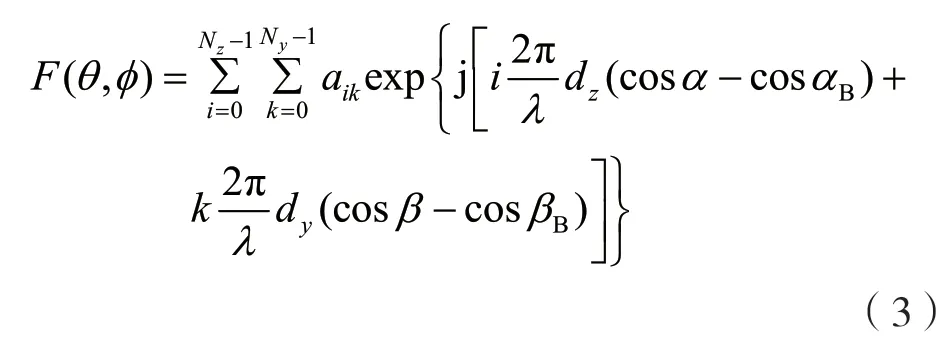
式中:αB和βB为设计的波束指向分别与z轴和y轴的夹角;k和i分别为z轴和y轴方向上的天线单元序数;aik为该天线单元的接收增益系数;λ为接收射频信号的波长。
该坐标系下所在方位为(αB,βB)的目标对应的天线波束宽度为:

将上述相邻行(列)单元延时在雷达坐标系中表述成方位角φ和俯仰角θ的形式,具体为:
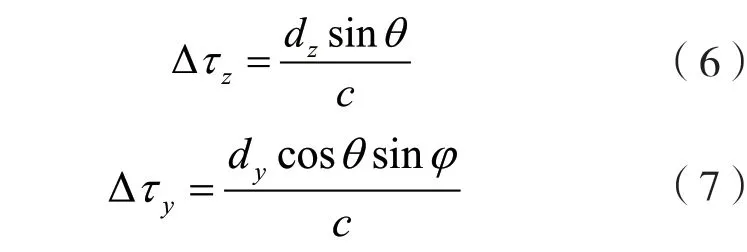
从以上表述可以看出,行延时Δτy依据方位角φ和俯仰角θ设计,列延时Δτz依据俯仰角θ设计。然而α与β相互独立,当α与β分别改变,只是独立改变行延时或列延时,这将降低延时线设计复杂度。由于不同描述只是使用不同的空间角度映射方法,本质上没有区别,本映射方法虽然简单但不失一般性。进一步地,对于归一化的平方阵列天线,dy和dz值相同,对于不同列,α值相同,相邻行的任意列上两个单元延时差相同,因此,通过设计每个行延时作为基本延时单元来减少可调延时单元数量。此外,行与列方向的总延时和延时步进相同,因此可以设计一种延时网络,适用于所有天线单元,同时兼容行与列方向的总延时与延时步进需求。
2 二维波束扫描仿真
针对天线阵列规模Ny×Nz=8×8,设计方位及俯仰扫描角≥±60°。
为了充分发挥天线性能,避免栅瓣,设计天线单元间距为:

式中:λ为系统工作频率对应的微波信号的波长。
根据方位角φ≥±60°和俯仰角θ≥±60°的需求,计算得到:

根据上述分析,对二维±60°扫描空间的波分指向分布进行了仿真,其空余分布的侧视和正视结果如图2 所示。

图2 三维空间所有波位方向图
仿真结果表明,生成的波位完全覆盖±60°二维扫描空间。对(α=90°,β=90°)波束指向及该波束方向图在α方向与β方向的投影进行了仿真计算,该波束指向下α方向波束宽度为12.4°,β方向波束宽度为12.4°。图3 分别给出了其三维图及α和β方向上的波束形状。
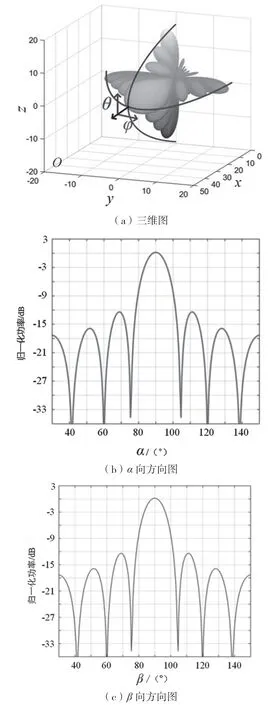
图3 (α=90°,β=90°)时波束方向图
图4 给出了(α=30°,β=64.3°)方向波束,即波束指向(θ=60°,φ=60°)时,该波束的三维图以及分别在α方向与β方向上的投影,该波束指向下α方向波束宽度为28.3°,β方向波束宽度为13.9°。仿真结果显示,可以实现±60°扫描角(二维)覆盖。

图4 (α=30°,β=64.3°)时波束方向图
3 结语
本文针对相控阵系统二维波束形成扫描下,由于俯仰向与方位向波束指向所对应的延时量相互关联,特别是在大规模孔径阵列下,将导致对波束形成芯片延时量的设计时,无法兼顾大的阵面延时量与小的延时步进和精度的矛盾,研究了相控阵阵列二维波束扫描的理论以及设计方法。本文所提方法在保证波束形成系统性能的前提下,统筹兼顾延时网络的复杂度和集成度,合理设计波束扫描方式,并针对8×8 二维64 单元的相控阵系统的空间波束分布进行了仿真分析,实现形成的波束在±60°的空域范围全覆盖,以期为波束形成系统的研发提供理论指导。
