无极绳连续牵引车无线监控系统设计
2022-09-23丁华
丁 华
(山西省长治经坊煤业有限公司,山西 长治 046000)
引言
我国煤炭资源储量丰富,但整体覆存不均,随着煤炭资源开采年限的不断增加,目前我国覆存较为简单的煤层已经逐步开采完毕,我国的开采重点逐步向着深部矿井转移。随着开采深度的不断增加,对煤矿设备的要求也在逐步增高,随着我国提出机械化换人、自动化减人、智能化无人的口号,煤矿机械目前的发展逐步朝着智能化、自动化方向发展。无极绳连续牵引车,是煤矿井下巷道以钢丝绳牵引的一种普通轨道连续运输设备[1-2]。无极绳连续牵引车作为井下不可或缺的运输设备,其在矿井工作过程中主要负责材料、设备等物件的运输任务,目前其主要用于运输距离长、运输倾角大的工作面。在长距离运输过程中,由于矿井工况环境较为恶劣,所以使得无极绳连续牵引车极易发生事故,一旦出现故障事故,不仅影响矿井的开采效率,严重时还会造成严重的人员伤亡[3-4],所以无极绳连续牵引车的现场监控显得十分重要。本文利用无线视频监控技术及PLC控制技术对无极绳连续牵引车无线监控技术进行研究,设计一款无线监控系统,从而为实时掌握无极绳连续牵引车运行状况和故障信息作出一定的贡献,同时对后续故障的排除提供一定的依据。
1 监控系统设计
对无极绳连续牵引车的视频监控系统进行总体设计,视频监控系统由本安型无线摄像仪、矿用隔爆兼本安型摄像仪、Wi-Fi对讲机等部分组成,系统主要负责对监控信息的采集,通过无线网络发送采集的视频信号。传输平台主要由矿用光缆、无线基站和网线组成,基站主要是由各种设备转化接口实现长距离信号的传输等。在井下控制部分,系统主要由隔爆本安型计算机和相应配套软件组成,井下部分主要是对摄像仪的信号进行采集、回放、存储。本文系统选用的监测设备由本安型旋转脉冲编码器和本安开关等组成,通过两者对无极绳连续牵引车运行的里程数据进行实时采集,从而保证无极绳连续牵引车的运行安全。视频监控系统设计总体方案,如图1所示。
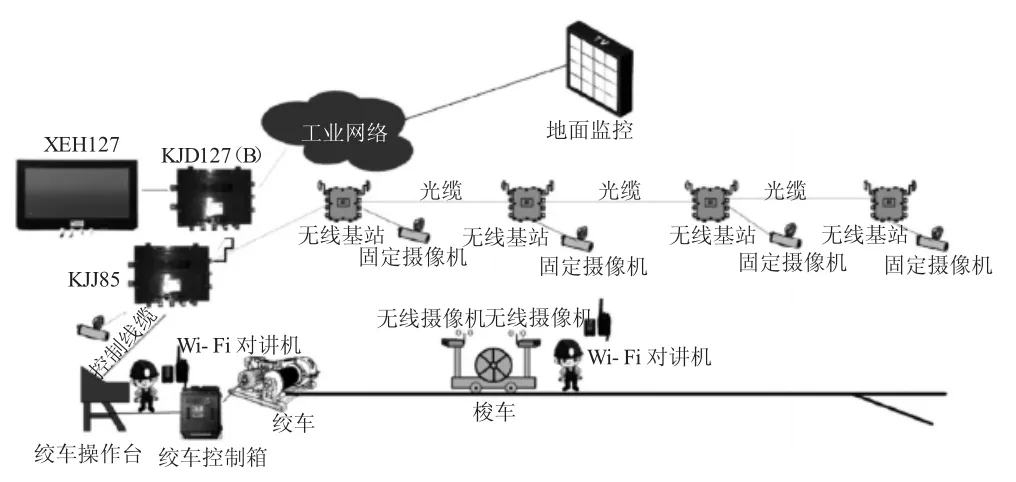
图1 视频监控系统设计框架图
为保证监测方案的可行性,在无极绳连续牵引车梭车前后端分别设置无线红外摄像仪和声光报警器,两者跟随梭车一起移动,同时在梭车运行车巷的两端及巷道内部运行过程中的起伏、急转等位置配备无线通信基站,同时在绞车房中布设绞车显示器,用于显示梭车在运行过程中的行车影像。同时为提升工作人员间的通信效果,为梭车巷中的工作人员、地面管控人员及绞车司机分别配备无线通信设备。
无极绳连续牵引车的车辆定位对于监控系统十分重要,定位功能的主要技术是无线射频技术、以太网通信技术。定位技术的主要目的是在绞车运行的同时将定位信息传输至现场管理人员,从而避免出现伤亡事件,该技术能够有效提升系统的信息化水平。无极绳连续牵引车定位功能主要由射频阅读器、上位机、射频电子标签及其他一些定位装置组合而成。其工作原理主要是在无极绳连续牵引车上安装射频电子标签,此时在巷道不同位置布置射频阅读器,当绞车运行至射频阅读器位置时,由于绞车上安装有射频电子标签,所以会在射频阅读器上显示信息,此时通过射频阅读器与上位机的通信连接,从而在上位机显示当前绞车运行位置和运行方向,实现绞车定位。在本文设计的通信视频中射频阅读器选用nRF2401,阅读器信息采集频段为2.4 GHz频段,在射频电子标签与射频阅读器间配备MSP430F147低功耗微控制器,完成两者间的信息通信。
对图像进行采集,在梭车两端同时安装红外摄像仪,采用2.4 GHz Wi-Fi通信方式,红外摄像仪通过本安型电池箱进行移动供电,红外摄像仪采用红外星光级摄像仪,对无极绳连续牵引车运行进行图像采集。在梭车道机尾位置安装音视频摄像仪,对梭车道的工况图像进行实时采集。同时在巷道车场安装摄像仪,摄像仪将拍摄影像传输至显示器上,利用显示器的传输接口将图像显示于地面调度中心,通过绞车语言信号与视频智能分析系统联动,达到安全监控报警的目的,做到“行人不行车,行车不行人”,从根本上保证人员及设备的安全[5-7]。
在系统内可配置矿用本安型手机,手机通过Wi-Fi覆盖进行相互间的通信。利用手机开发软件进行岗位司机移动实时打点。移动终端与系统服务端通过通信网络进行实时连接,达到手机端与服务端的双向数据传输。当移动端下达操控指令后,此时信号传输至服务端进行处理,实现远程控制,输出指令包括启动、停止、打点、急停等。
2 工业化试验
对设计的无极绳连续牵引车监控系统进行现场应用试验,试验可分为地面和井下两种,首先进行地面测试,地面测试共涉及4台分站和1台主站,分站和主站距离间隔设定为100 m,主站与显示器、计算机进行连接,对各站的动态进行监控,在推车上设置摄像仪、不间断电源,推车从主站向分站进行移动,两端部分站分别设定90°的拐角。通过试验发现各个分站间视频终端漫游切换延时在2~3 s之间,图像传输在上位机上显示图像较为清晰,且视频流畅性较佳。
对井下进行试验,井下布置10台分站与1台主站,主站与分站的间隔和地面相同均为100 m,主站与分站通过光缆进行连接。将移动电源和网络摄像仪安装于绞车上,主站位于上车场,无极绳连续牵引车向着下车场方向运行。在地面调度室进行图像的实时显示。无极绳连续牵引车从上车场至下车场运行过程中漫游切换时间为4 s左右,整个系统的图像传输流畅性及图像传输质量较好,整体图像播放的流畅性较好。经过试验研究可以看出,设计的无极绳连续牵引车监控系统整体可行,为矿井智能化建设提供了一定的参考。
3 结语
本文设计了一款无极绳连续牵引车监控系统,系统通过无线方式进行信号采集,利用工业以太网进行数据传输,实现了绞车在梭车道内人与设备、人与人和设备与设备间的信息互联,同时通过以太网实现了无线视频监控和数据图像采集。对设计的无极绳连续牵引车进行地面及井下试验,发现视频终端切换时间较短,传输图像流畅且清晰度高,为矿井智能化建设及安全运行提供一定保障。