基于异方差高斯过程回归的大坝变形预测模型
2022-09-23罗亦泳吴大卫张立亭刘宏宏
罗亦泳, 吴大卫, 张立亭, 黄 城, 刘宏宏
(1. 东华理工大学 测绘工程学院,江西 南昌 330013;2. 南昌市新建区土地管理勘察测量队,江西 南昌 330100)
目前,我国水库大坝面临大坝数量多、气候变化、建设条件复杂等多重因素带来的风险(中华人民共和国水利部,2018)。大坝在运营过程中受到水位、温度等多种复杂因素影响,大坝的安全将受到巨大的威胁。大坝变形监测技术是保障大坝安全运行的重要技术手段,通过建立大坝变形预测模型可及时掌握大坝变形发展趋势,为大坝安全预报预警提供可靠的理论依据(顾冲时等,2016)。因此,大坝变形预测模型研究是大坝安全监测的核心内容之一,对大坝变形灾害防治具有重要的意义。
近年来,大坝变形预测模型的研究成果较为丰富,主要包括确定性模型、统计预测模型及机器学习算法等(吴中如,2003;Mata et al.,2013;Liang et al.,2018;汪宏宇等,2021)。大坝变形是一个多因素影响的非线性系统,无法精确地掌握变形过程及机理。因此,确定性预测模型非线性映射能力不足,预测结果的精度有待于提高。大坝统计预测模型主要包括统计回归模型、时序分析模型(潘国荣,2005)、模糊数学模型和灰色系统模型(靖洪文等,2012)等,这类方法是一种经验模型,存在过度依靠数学处理、随机性大和预报时间短等缺点。随着机器学习方法的快速发展,机器学习算法在变形预测领域得到较好的应用。智能算法、人工神经网络模型被应用于大坝变形,该方法预测精度得到较大提高(陈俊风等,2020;王新洲等,2005;胡纪元等,2014;徐锋等,2012)。但神经网络模型存在局部最优、收敛慢、结构设计难,并且当样本较少时,预测精度不理想。针对神经网络模型的经验风险最小原则的缺点,提出基于支持向量机的大坝变形预测方法(王新洲等,2008;董明等,2017;宋志宇等,2007;张豪等,2011;罗亦泳等,2010;朱军桃等,2019),但支持向量机存在核函数参数和损失函数难以确定等问题。基于极限学习机(ELM)构建了变形预测模型,预测结果的精度得到一定的提高(王晓玲等,2020)。但由于 ELM 对噪声敏感,且特征映射存在随机性,因此降低了算法的鲁棒性和泛化能力。当前研究成果表明,机器学习算法能较好地表达变形影响因素与变形量之间的复杂关系,是变形预测研究的发展趋势。当前研究主要集中在提高变形预测方法精度方面,而对预测结果的可靠性分析研究较少。用于变形的机器学习算法通常包含多个需要用户确定的参数,参数取值是否合理严重影响预测精度及可靠性。因此,需要构建一种参数自适应及结果可靠性高的大坝变形预测模型。
标准高斯过程回归(GP)是近年来一种基于贝叶斯网络的新型学习算法,对处理高维、小样本数据及非线性问题具有很好的适应性和泛化能力,并且参数自适应,可以输出预测变量的方差与期望,可分析结果的可靠性(苏国韶等,2008;Rasmussen et al.,2006; Gibbs,1997;Kocian et al.,2008)。因此,GP受到广泛关注而成为机器学习的研究热点,并已被应用于变形预测(罗亦泳,2016)。但标准的GP假定噪声为高斯分布,且整个数据集中噪声方差为常值。在实际的变形监测过程中,监测环境在不断地变化。因此,假设噪声方差为常数不符合实际,影响预测结果及可靠性。针对标准GP算法的上述缺点,GP的改进算法——异方差高斯过程回归算法(HGP)被构建(Kersting et al.,2007)。HGP算法将观测数据中的噪声方差作为变量,并利用高斯过程进行对其建模,基于变分推理进行解算。由于HGP算法充分考虑了数据中的噪声变化特征,其改进方法更加符合实际工程环境,可以有效提高算法实际应用效果(Rogers et al.,2020;Wang et al.,2019;Rodrigues et al.,2018; Lzaro-Gredilla et al.,2013)。鉴于HGP算法在处理复杂系统建模上的优势,笔者针对当前大坝变形预测模型存在的问题,提出一种基于异方差高斯过程的大坝变形预测模型,以提高变形预测结果的精度及可靠性,并与多种变形预测方法进行对比,验证新方法的有效性。
1 异方差高斯过程回归算法
标准的高斯过程学习算法将测量噪声的方差作为常数,但变形监测过程往往受到多种随机性因素干扰。因此,将噪声的方差看成常数进行建模和解算会影响算法的预测精度。对此,异方差高斯过程被提出应用于复杂系统的建模。相比标准高斯过程学习算法,该方法取得更好的预测结果。HGP是标准高斯过程算法的拓展,将建模过程分成两部分(Wang et al.,2019;史宇伟等,2014;Lzaro-Gredilla et al.,2011;严宏等,2018)。首先运用标准高斯过程对无噪声输出进行建模,然后对噪声再运用高斯过程进行建模,该方法能体现出变形监测量的随机性及波动性。
HGP算法将变形量分为两部分:
y=s+r
(1)
式中,y为变形监测值,s为时间t对应的理想标准值,r为对应的偏差项。

p(s,s*)~N(0,KN+1)
(2)
式中,KN+1为此多元高斯分布的协方差矩阵,具有如下的形式:
(3)
式中,k**=k(t*,t*),k*=[k(t1,t*)k(t2,t*)…k(tN,t*)]T,KN如式(4)所示。k(ti,tj)为核函数,通常采用squared exponential核函数(史宇伟等,2014)。
(4)
因此,可以利用标准高斯过程的结果计算测试集中时间t*对应的标准值s*的后验分布,计算公式如下:
(5)

(6)
(7)
利用高斯过程原理分别对标准值和偏差项建模后,需要对模型进行解算,求解超参数,最终得到预测变量的验后分布(期望和方差)。根据标准高斯过程的推导结论,可以计算出关于s*的后验分布p(s*|t*,y,t,r,r*):
p(s*|t*,y,t,r,r*)~N(μ*,σ2)
(8)

对r和r*进行积分,得到y*的后验分布:
(9)
由于无法直接求解式(9),因此采用变分推断求取近似解。首先对边缘概率p(y)的对数进行分解,如式(10)。当寻求分布q(s)和q(r)最大化下界时,也就会使式(10)中KL散度最小化。优化p(s,r|y)在分解形式q(s)q(r)关于q(s)最大化的推导结论,可以进一步得到一个依赖于q(r)的近似下界,如式(11)所示。
ln(p(y))=L(q(s),q(r))+KL(q(s)
q(r)‖p(s,r|y))
(10)
式中,KL(·‖·)表示KL散度(Kullback-Leibler divergence),L(q(s),q(r))是ln(p(y))的下界。根据式(11)的极值点与偏导数的关系,可得到μq和Σq,如式(12)和式(13)所示。
(11)
(12)
(13)
式中,tr(·)表示矩阵的迹,R为一对角矩阵,其对角元素为[R]ii=exp([μq]i-[Σq]ii),而Kr是使用协方差函数kr(t,t′)计算的协方差矩阵,Λ表示半正定对角矩阵。
采用共轭梯度法优化参数高斯过程协方差函数中的参数、矩阵Λ中的对角线元素以及用于控制偏差项方差平均水平的μr,进而得到s*的后验分布:
(14)

基于以上结果,可以得到y*的后验分布(Lzaro-Gredilla et al.,2011;严宏等,2018):
(15)

2 大坝变形预测模型构建
2.1 预测模型构建

(16)

图1 基于HGP的大坝变形预测方法建模流程Fig.1 Modeling flow of dam deformation prediction method based on HGP
2.2 工程实例
以丰满大坝为例,验证大坝变形预测HGP模型的有效性及可靠性。丰满水电站是中国最早建成的大型水电站,东北电网骨干电站之一,位于吉林省吉林市第二松花江的中游,吉林市东南为24 km处。拦江大坝为钢筋混凝土重力坝,坝长为1 080 m,坝高为91 m,水库正常蓄水位标高为263.5 m,库容为108亿m3。坝体从左岸到右岸共分60个坝段,每个坝段长为18 m。本研究选取30号坝段变形数据开展变形预测模型研究,收集了大约3年的大坝变形监测数据,包括大坝变形量γ(mm)、气温T(℃)、上游水位H(m)和累积时间t(d)数据。顾冲时等(2016)、吴中如(2003)、陈俊风等(2020)、王晓玲等(2020)较好地分析了丰满大坝和类似大坝的变形影响因子,在此基础上确定丰满大坝变形的影响因子包括11个,其中4个与水位有关的影响因子H、H2、H3、H4,5个温度有关的因子T、sin(2πt/365)、cos(2πt/365)、sin(4πt/365)、cos(4πt/365),2个时间效应影响因子θ=0.01t、lnθ。将11个大坝变形影响因子作为HGP算法的输入,对应变形量作为输出。总共收集了164期变形数据,其中前129期数据作为训练数据集,用于确定HGP算法的超参数,进而建立变形预测模型(表1);后35期数据作为测试集,用于分析预测模型的精密度及可靠性(表2)。

表1 训练集中的部分数据

表2 测试数据集
近年来,反向传播(BP)神经网络算法、最小二乘支持向量机(LS-SVM)和标准GP在变形预测领域得到较好的应用。为了进一步验证HGP算法具有更好的大坝变形预测精度,分别利用标准的GP算法(采用与HGP相同的核函数)、BP神经网络算法和LS-SVM算法构建大坝变形预测模型。分别对测试集进行预测(表3)。
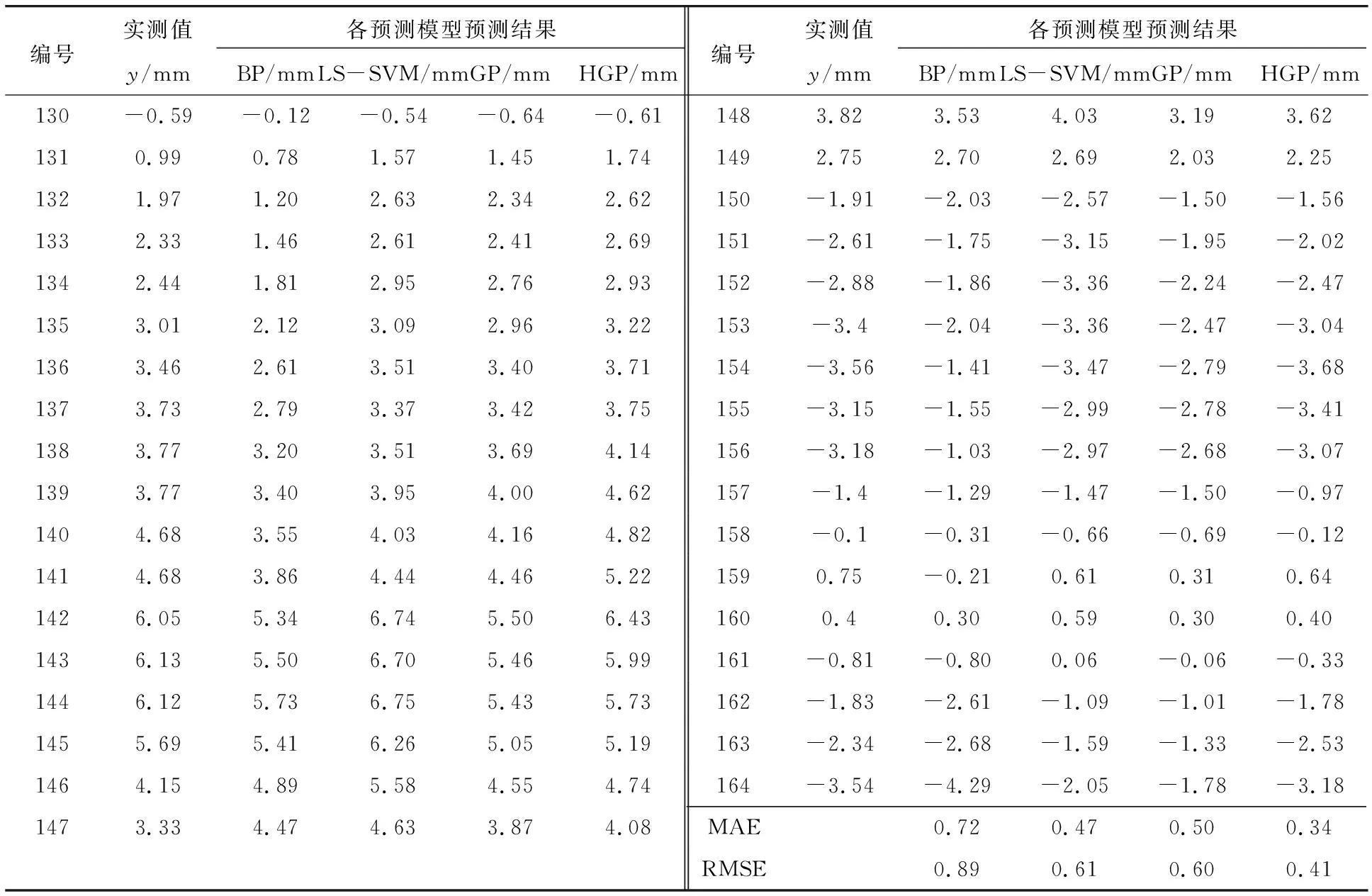
表3 变形预测结果
为了定量评价各预测模型的精度,采用平均绝对误差(MAE)和均方根误差(RMSE)评价各模型的精度,具体计算见式(17)和式(18)。根据各模型的预测结果,分别统计各模型的精度指标MAE和RMSE(表3)。由表3中的4种变形预测方法的精度指标可知,HGP算法的平均绝对误差和均方根误差均小于BP、LS-SVM和GP算法,验证了HGP算法具有更好的大坝变形预测精度。HGP算法的预测精度优于标准GP算法,表明HGP算法在标准GP的基础上,充分考虑了数据噪声变化的特点,有效改善了标准GP算法的大坝变形预测精度。
(17)
(18)



图2 HGP的预测结果及95%置信度的置信区间图Fig.2 HGP prediction results with the 95% confidence interval chart
3 结论
针对大坝变形的特点,利用标准GP的改进HGP算法构建大坝变形预测新模型,并对其预测精度及可靠性进行分析验证。结果表明,与GP、LS-SVM、BP神经网络等算法相比,HGP算法具有更高的大坝变形预测精度和可靠性,并且弥补了当前大坝变形预测方法缺少结果可靠性分析功能的缺点。