基于巡检机器人的轨道交通车辆车底检测方法研究
2022-09-23管春玲钟秋燕
管春玲,钟秋燕
(广州铁路职业技术学院,广东广州,510430)
对轨道交通车辆进行检修保养,是保证轨道交通车辆安全运行的基本前提[1~2]。随着我国轨道交通运营里程和运营车辆的逐步增加,现有机务段、动车所的轨道交通车辆的检修能力逐渐趋于饱和,轨道交通车辆数量配备与实际检修能力存在错位发展趋势。传统的轨道交通车辆检修作业主要是基于人工完成,多数在夜间进行,工作繁琐、强度大、时间紧,在检修效率和检修质量上面临双向压力[3]。因此十分有必要对轨道交通车辆的检修技术进行升级,本文对基于巡检机器人的轨道交通车辆底部检测方法进行了深入研究,最终实现了立体化、智能化、信息化的全方位多角度检修新模式,在有效保证检修效率和检修质量的同时降低了人工劳动的强度[4~5]。
1 机器人巡检系统硬件组成
基于轨道交通车辆底部检测目标的特点及检测目标的分布情况,在轨道交通车辆检修车间的车库地沟构建基于巡检机器人的轨道交通车辆车底检测系统[6]。在轨道交通车辆入库后,基于巡检机器人以转向架为单位对轨道交通车辆的车底情况进行常规巡检,系统对轨道交通车辆的整车底部进行图像检查,从多个角度对车底的关键部件进行图像信息采集,并对测试项点进行逐一测量,将检测结果实时发送给主控中心和智能手持终端[7~8]。基于巡检机器人的轨道交通车辆车底检测系统主要包括了数据分析单元、数据服务器、智能手持终端、供电单元、机器人、图像数据采集单元、数据传输单元、传感器等,具体的系统组成及功能描述如表1所示。

表1 车底检测系统组成及功能描述
2 巡检功能实现原理
2.1 定位巡检实现原理
轨道交通车辆车底检测系统采用双机器人配置结构,通过两次定位检测,完成对单个转向架的检测,能够满足对轨道交通车辆转向架核心部件的全方位、多角度检测[9~10]。该项定位技术的实现需要综合考虑巡检机器人自身的性能参数、单个机器人的升降高度、双机器人之间的间隔距离等。检测过程中,要保证用最少的定位次数(两次)完成对轨道交通车辆底部转向架的核心部件的检测,实现轨道交通车辆检修时长的压缩以保证检修效率[11]。
轨道交通车辆转向架共包含了两根轴,轨道交通车辆车底检测系统两次分别定位在不同轴的左侧和右侧,这样就能够实现对整个转向架检测项点的覆盖。轨道交通车辆车底检测系统第一次定位后,机器人1负责检测1号轴的左侧,机器人2负责检测2号轴的左侧和转向架中部;检测系统第二次定位后,机器人1负责检测1号轴的右侧及转向架的中部,机器人2负责检测2号轴的右侧。具体检测原理如图1所示。
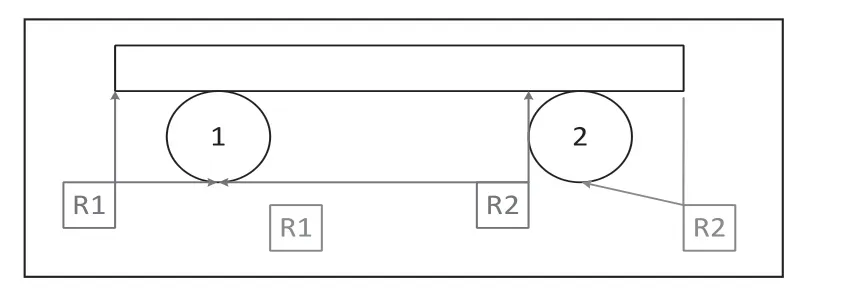
图1 定位巡检实现原理
2.2 车底图像二维识别原理
采用结构相似性(SSIM)指标来衡量两幅图像的相似程度;采用图像点特征的方法对轨道交通车辆转向架核心部件进行特征检测、特征匹配、提出误差匹配,最终再基于结构相似性指标来衡量匹配结果。对应位置的计算结果越大,说明二者的差异程度越小,反之,二者的差异程度越大,可能出现部件形变或部件丢失。
假定存在两张图像A和图像B,两张图像的结构相似性可按照如下方式计算得到:

其中,μA为A的平均值,μB为B的平均值,为A的方差,
为B的方差,σAB为A和B的协方差,m1和m2是用来保持计算收敛的常数。

其中,K是像素的动态调节区间,m1的取值为0.01,m2的取值为0.03。结构相似性的取值范围为,当两张图像完全一样时,结构相似性参数值为1,当两张图完全不一样时,结构相似性参数为-1。
作为结构相似性理论的实现,结构相似性参数从图像组成的角度将结构信息定义为独立于亮度、对比度的,反映场景中物体结构的属性,并将失真建模为亮度、对比度和结构三个不同元素的组合。用均值作为亮度的估计,标准差作为对比度的估计,协方差作为结构相似程度的度量。图像的二维识别结果如图2所示,检测到了转向架出现了异常,转向架上出现了异物附着。
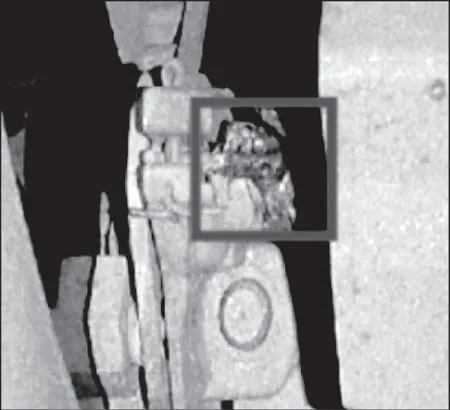
图2 轨道交通车辆转向架检测异常结果
2.3 车底图像三维检测原理
采用双目相机和结构光相互配合运用的方式来实现轨道交通车辆转向架核心部件三维结构的检测,在实现上包括双目图像交互匹配和三维外形复原两部分。进行双目图像交互配合时先要基于张正友标定模型进行双目相机的标定,再利用双目纹理图像来完成图像特征点的交互匹配,在此基础上进行配准点三维计算,最终得到大量的匹配点,由此可以对核心部件的三维结构进行有效恢复。基于三维检测的双目纹理成像如图3所示。

图3 基于三维检测的双目纹理成像
2.4 图像传输原理
轨道交通车辆车底检测系统所采集到的图像都是高清图像,其数据量非常大,而此数据对进行转向架、连接器等部件状态的检测意义非常重大,同时为保证检测时效,需将此图像数据快速传输至数据分析中心进行分析和存储,因此图像数据无线传输技术为此系统核心能力之一。车底检测系统基于图像分层编解码的窄带宽、超高清图像传输技术,对原始图像数据分层处理,优先对关键数据进行传输,以保证作业人员能够在短时间内得到自己所需要的数据,能够根据实际需求动态加载高清图像,提升作业人员的体验感,在现场局域网内部进行数据交互,采用分层数据传输技术后,高清图像的加载速度显著提升。图像传输原理如图4所示。

图4 图像传输原理
3 实例运用分析
基于巡检机器人的轨道交通车辆车底检测系统能够对轨道交通车辆的转向架、连接器等进行全方位、多角度的检测,并能够对检测数据进行科学的运算和管理。该系统已经在部分机务段及动车所进行了实际应用,其实际价值主要体现在如下几个方面:
(1)轨道交通车辆车底检测系统采用了机器人技术,现场作业人员可以根据机器人系统的检测结果确定是否需要进行部分结果复验。这样能够进一步确定实际需要进行的工作,减少不必要的工作,缩短检修时间,提高检修效率,降低人工成本。
(2)以往需要通过人工完成的细节检测、消耗时间较多的工作,通过检测系统进行自动报警、自动诊断定位,从而展开具有针对性的维修保养,缩短常规检修作业时间。
(3)降低检修工作的安全风险,由于车辆检修工作需要安排在车间地沟中进行,地沟光线较弱,存在一定的作业风险。采用机器人检测系统后可以大量减少作业人员地沟作业项目,现场作业安全风险可得到一定程度降低。
(4)实现管理成本的降低,采用轨道交通车辆车底检测系统后,车辆全部的数据都可以进行数字化处理,检测结果存储于数据服务器中,方便运营单位进行历史追溯,在出现人员工作疏忽造成安全隐患发生时可快速明确相关责任人员,强化作业人员责任心。
4 结论
轨道交通车辆车底检测系统运用了机器人技术、图像识别技术、无线数据传输技术等,能够快速、全面实现对轨道交通车辆转向架、连接器等车底部件的全方位、多角度检测,并对检测发现的异常状态进行报警提示。轨道交通车辆车底检测系统的运用,对提高轨道交通车辆安全性、降低人工成本、降低时间成本、提升企业经营效益方面起到了积极的作用。对于保障轨道交通车辆的高效、安全运营具有重要引导意义。
