立体栖架散养蛋鸡行为加速度信号降噪方法比较分析
2022-09-23聂路玮王朝元
胡 乾 聂路玮 王朝元,2,3*
(1.中国农业大学 水利与土木工程学院,北京 100083; 2.农业农村部设施农业工程重点实验室,北京100083; 3.北京市畜禽健康养殖环境工程技术研究中心,北京 100083)
基于加速度传感器的穿戴式行为监测系统常用于畜禽行为的自动识别和活动强度的量化,但设备抖动、畜禽应激、基础运动等因素易对监测信号造成干扰,从而对识别效果产生不利影响,因而对信号进行降噪是畜禽行为自动识别研究的重要措施。小波阈值法、经验模态分解(Empirical mode decomposition,EMD)是常用的信号降噪方法。小波阈值法具有时频分析能力强、运算速度快与原始信号最优估计易获得等优势,已应用于二维平面种鸡行为加速度信号和蛋鸡叫声信号的降噪。基于EMD提出的自适应完备集合经验模态分解(Complete ensemble empirical mode decomposition with adaptive noise,CEEMDAN)可根据信号特征进行分解,对非平稳信号具有良好的适应性,以CEEMDAN为基础的降噪方法在去除机械振动加速度信号的噪声上取得了良好的效果。
立体栖架散养系统通过饲养空间的优化配置,理论上可满足蛋鸡在三维空间上的栖息、行走、跳跃等自然行为表达的实际需求,被用来代替传统笼养系统,是国内外蛋鸡生产方式转型升级发展的重点方向。与猪、牛等体型较大的动物在二维平面上的行为活动相比,立体栖架系统中散养的蛋鸡,可以在三维空间中自由表达其行为活动,动作更加灵活,频率更快,幅度更小,因此对其行为进行识别时要求信号的精度更高,干扰更少。虽然小波阈值法和基于CEEMDAN的降噪方法已广泛应用于不同领域,但是否适用于立体栖架散养蛋鸡在三维空间中的不同行为加速度信号的降噪,还有待进一步研究。
基于K-means、神经网络、KNN和SVM等机器学习方法对畜禽不同行为进行分类识别的研究较多,但目前还存在需要建立训练模型、计算复杂、长期监测困难等问题,因而实际应用的瓶颈还有待进一步突破;而通过直接提取不同行为信号特征,并基于其阈值大小对畜禽行为进行自动识别,则具有计算量小和实用性强等优势。目前国际上已构建了基于加速度信号阈值特征的奶牛行为自动识别决策树模型,具有良好的分类识别效果。与奶牛行为相比,散养蛋鸡可以在三维空间中进行活动,行为类型更加丰富,行为自动识别难度更大,蛋鸡在立体空间中不同行为的加速度信号特征尚不明晰。
本研究旨在比较小波阈值、CEEMDAN、CEEMDAN结合小波阈值对立体栖架散养蛋鸡行为加速度信号的降噪效果,筛选合适的降噪方法和参数,提取蛋鸡在立体空间中的趴卧、站立、采食、饮水、行走和跳跃6种典型行为加速度信号特征,探索基于加速度信号特征值进行行为自动分类识别的可行性,为蛋鸡行为自动识别与分类研究应用提供依据。
1 材料与方法
1.1 试验材料
1
.1
.1
试验系统与对象试验在中国农业大学上庄实验站试验鸡舍中进行。试验采用的立体栖架散养系统由食槽、水线、产蛋箱、栖杆等组成(图1)。本研究在原有鸡笼靠近平台侧搭建V型分布的栖杆,左侧配置一定坡度分布的栖杆,满足鸡在不同高度上的空间活动需求。试验开始前1个月,将19只蛋鸡转入试验鸡舍以适应环境和散养设备;正式试验时,随机挑选6只健康蛋鸡作为研究对象。在鸡笼不同位置安装了摄像头,记录蛋鸡在立体空间中的行为活动。
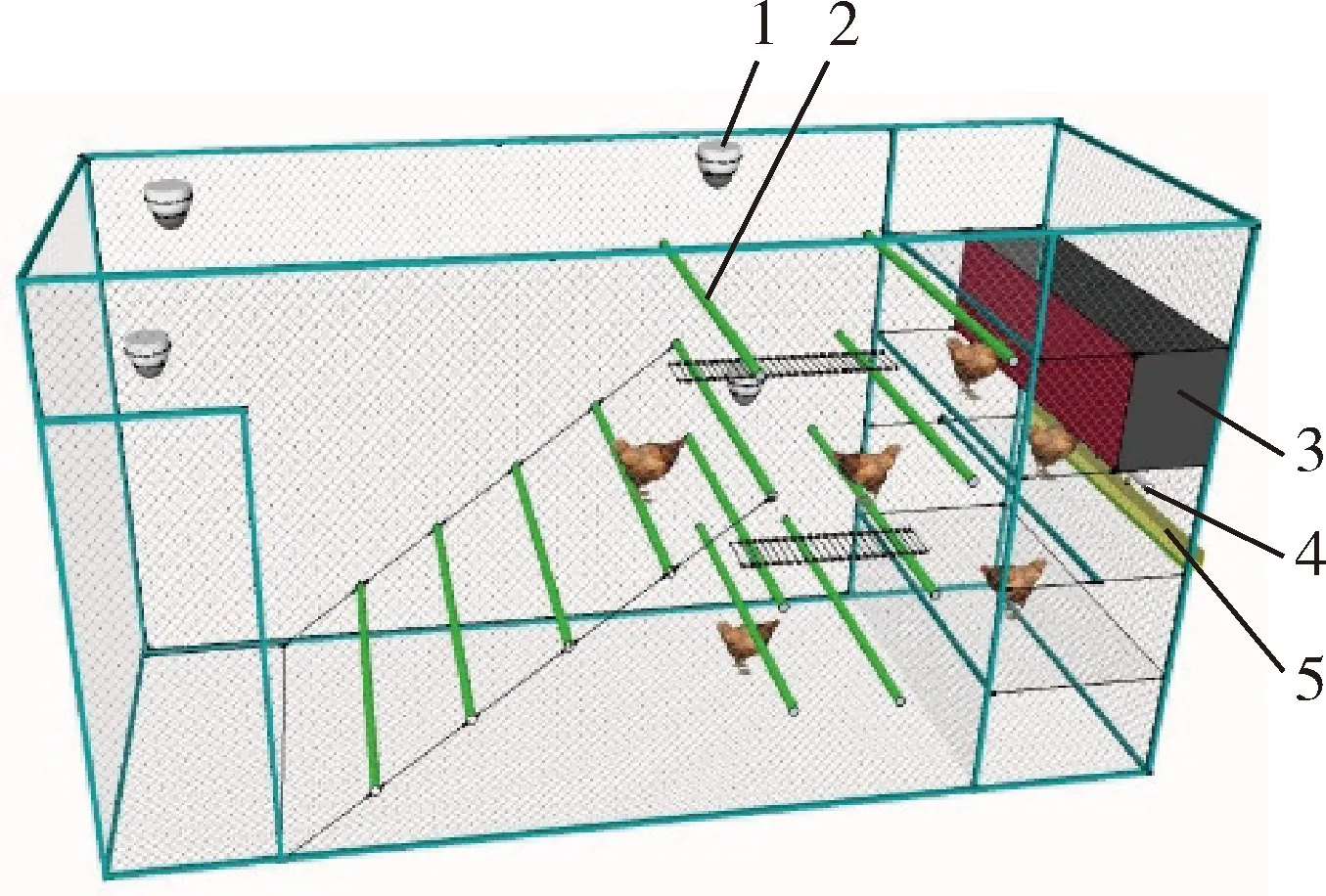
1.摄像头;2.栖杆;3.产蛋箱;4水线;5.食槽 1.Camera; 2.Perch; 3.Nest; 4.Water line; 5.Feed trough图1 蛋鸡立体栖架散养系统Fig.1 Aviary system for laying hen production
1
.1
.2
蛋鸡行为监测系统与信号采集本研究开发了由云服务器、同步中继、六轴姿态传感器(LSM6DSL,STMicroelectronics)模块等组成的蛋鸡三维空间行为穿戴式监测系统。该行为监测系统满足体积小、质量轻、穿戴简单等特定要求,在蛋鸡佩戴后不影响其正常的行为活动。试验时,使用“8”字型弹性绑带,将传感器模块固定在蛋鸡背部;使用“U”型强韧柔软标签,将蛋鸡从1,2,…,6进行编号。加速度传感器采用锂电池供电,量程为±2 g,蛋鸡背部X
、Y
、Z
轴加速度数据的采样频率为20 Hz。传感器模块使用ZigBee技术由同步中继进行时间实时校准,同步中继则通过Wi-Fi连接云服务器以获取精准时间,保证各传感器时间的一致性与准确性。1.2 数据来源
随机选取5只蛋鸡,对2021-01-11T05:00:00—05:20:00、12:00:00—12:20:00和18:00:00—18:20:00时间段内的连续加速度信号,以10 min为一段对信号进行截取,比较小波阈值、CEEMDAN、CEEMDAN结合小波阈值3种方法对X
、Y
、Z
轴加速度信号的降噪效果。对数据降噪后,分析同一天内蛋鸡趴卧、站立、采食、饮水、行走、跳跃6种行为加速度信号标准差分布,6种行为数据量分别为11 360、5 580、10 460、10 800、4 830、3 470,共计46 510个数据。1.3 降噪方法与评价
1
.3
.1
小波阈值降噪小波变换是一种时间窗和频率窗均可改变的时频分析方法,对非平稳信号分析具有自适应,可有效地分析加速度信号时频特征,适用于蛋鸡行为加速度信号降噪。小波阈值法降噪包括3个步骤:
1)选择合适的小波基函数和分解层数对蛋鸡原始加速度信号x
(n
)进行小波变换,得到小波分解系数A
;2)对A
进行阈值处理,得到小波系数的估计值a
;3)根据系数a
进行信号重构,得到降噪后信号f
(n
)。本研究选择常用的小波基函数db3对蛋鸡行为加速度信号进行分解。试验中,信号采样频率为20 Hz,而蛋鸡跳跃、行走等行为活动频率较高,为保留有用信号,小波分解层数选择1层。小波阈值分为硬阈值和软阈值,软阈值降噪后信号整体性好,更加平滑,因此本研究只针对软阈值进行讨论。小波系数软阈值处理公式为:
(1)
式中:δ
表示阈值大小。阈值选择是小波阈值法降噪的关键,本研究对史坦无偏似然估计阈值(Rigrsure)、固定式阈值(Sqtsolog)、启发式阈值(Heursure)、最大最小值阈值(Minimaxi)4种常用阈值的降噪效果进行了比较,以选择适宜的阈值。4种阈值计算方法如下:设N
为序列长度,信号y
(m
)为|x
(n
)|的升序序列,其中m
=1,2,…,N
,则Rigrsure阈值δ
的计算公式为:(2)
(3)
Sqtsolog阈值δ
定义为:(4)
Heursure阈值δ
是Rigrsure和Sqtsolog阈值的结合,求解时需先求出δ
和δ
,具体计算公式为:(5)
(6)
(7)
Minimaxi阈值δ
定义为:(8)
1
.3
.2
CEEMDAN降噪蛋鸡在立体栖架散养系统中能够自由表达自然行为,行为活动类型多样,动作转换频次快,行为加速度信号为非平稳信号,易受噪声干扰。
本研究采用Torres提出的CEEMDAN方法对蛋鸡行为加速度信号进行分解,加入的白噪声均值为0、标准差为0.25,重复添加次数为100。CEEMDAN分解是采用三次样条对信号极值点进行插值,形成上下包络线,将上下包络线的均值曲线从信号中分离,得到经验模态(IMF)分量。因此CEEMDAN能根据加速度信号特点自适应分解信号,得到若干从高频到低频排列的IMF分量。由于噪声频率较高,有用信息频率较低,CEEMDAN降噪时直接去除高频分量,对低频分量进行重构。降噪后信号可表示为:
(9)
式中:IMF为第m
个IMF分量;K
为IMF分量个数;r
为残余分量;k
为区分高频分量与低频分量的值,是影响CEEMDAN降噪效果的关键参数。不同时间段内蛋鸡行为加速度信号不同,经CEEMDAN得到的IMF分量个数也可能不同,主观判断k
值大小易导致误判。排列熵(Permutation entropy,PE)适用于衡量不规则信号复杂程度,其值越大,包含的噪声越多,有利于区分高频和低频分量。因此,本研究通过计算各IMF分量PE值大小,并做归一化处理,进而确定k
值。1
.3
.3
CEEMDAN结合小波阈值降噪由于蛋鸡行为加速度信号的采样频率低,CEEMDAN分解信号后易出现高频分量与低频分量分界不准确,以及高频分量中含有部分有用信号的情况,直接去除高频分量会导致有用信号损失。因此,本研究采用CEEMDAN结合小波阈值法对蛋鸡行为加速度信号降噪,以期取得更好的降噪效果。具体降噪步骤如下:
1)对原始信号进行CEEMDAN分解,得到K
个IMF分量和1个残余分量;2)计算每个IMF分量排列熵,并进行归一化处理,确定前k
个分量为高频分量;3)对前k
个IMF分量分别采用小波阈值法降噪,参数与只采用小波阈值降噪参数相同;4)将小波阈值法降噪后的前k
个IMF分量与其他分量一起重构,得到降噪后的信号。1
.3
.4
降噪效果评价在去除蛋鸡行为加速度信号噪声时,需要尽可能多地保留不同行为的信号特征。本研究采用信噪比(Signal-to-noise ratio,SNR)和均方根误差 (Root mean square error,RMSE)2个指标定量评价不同方法的降噪效果。SNR为原始信号功率和噪声功率的比值,其值越大,降噪效果越好。RMSE为原始信号与降噪信号偏差的平方与数据量n
比值的平方根,其值越小,降噪效果越好。SNR和RMSE均能反应降噪前后信号细节差异,是评价降噪效果的常用指标,计算公式如下:(10)
(11)
1.4 蛋鸡特征行为信号的加速度标准差分析
按0.5 s窗口大小,分别计算蛋鸡趴卧、站立、采食、饮水、行走、跳跃6种特征行为X
、Y
、Z
轴加速度标准差。根据箱形图异常值判断准则剔除异常值,再进行算术平方根(sqrt)转换,使每种行为加速度标准差分布符合或接近正态分布,后文提到的标准差均为经sqrt转换后的标准差。根据6种行为加速度标准差频率分布对立体栖架散养蛋鸡典型行为分类,并采用非参数检验判断各类行为标准差是否具有显著性差异。蛋鸡行为描述见表1。表1 蛋鸡行为描述
Table 1 Behaviors description of laying hen
行为类型Types of behaviors描述Description趴卧 Lying腿和胸部接触笼底或栖杆Legs and chest contact cage bottom or perch站立 Standing双腿站立,肢体没有明显移动Standing on two legs with no visible movement of the limbs采食 Eating用喙接触食槽或头部在食槽上方With head in or above the feeder饮水 Drinking用喙啄饮水乳头Pecking to a drinking nipple行走 Walking以正常速度或快速行走Walking at a normal speed or fast pace跳跃 Jumping蛋鸡向上或水平或向下跳跃The lay hen jumps up or horizontally or down
2 结果与分析
2.1 CEEMDAN分解
本研究分别计算了所有数据段经CEEMDAN分解后得到的各IMF分量的排列熵PE,并根据PE值的大小确定k
值。以编号6蛋鸡为例,其05:00:00—05:10:00时间段内X
轴加速度信号分解得到的各IMF分量的PE值归一化结果见表2。结果发现,不同数据段分解后IMF~IMF分量的PE值均大于0.880 0。因此,取k
值为4,即将IMF~IMF分量作为高频噪声,其余分量为有用信号。本研究与耿读艳等区分高频分量与低频分量的PE值相似。表2 编号6蛋鸡05:00:00—05:10:00 轴加速度各IMF分量的排列熵(PE)
Table 2 The PE value of each IMF component of No.6 laying hen’s -axis acceleration data from 05:00:00 to 05:10:00
分量ComponentPE值PE value分量ComponentPE值PE value分量ComponentPE值PE value分量ComponentPE值PE valueIMF11.000 0IMF50.737 3IMF90.285 7IMF130.222 9IMF20.982 3IMF60.548 0IMF100.249 8IMF140.215 1IMF30.943 8IMF70.427 3IMF110.235 0IMF40.944 2IMF80.334 3IMF120.233 9
2.2 3种降噪方法的降噪效果比较
计算立体栖架散养蛋鸡行为X
、Y
、Z
轴加速度信号经小波阈值、CEEMDAN、CEEMDAN结合小波阈值3种方法降噪后的信噪比(SNR)和均方根误差(RMSE),并求均值,结果见表3。可见,小波阈值法对蛋鸡X
、Y
、Z
轴加速度信号的降噪效果更好。与CEEMDAN降噪相比,小波阈值法降噪后信号的SNR、RMSE均值分别高3.659 6、低0.023 1;与CEEMDAN结合小波阈值法降噪相比,SNR、RMSE均值分别高0.261 7、低0.001 3。表3 不同方法对加速度信号的降噪效果
Table 3 Denoising effect of different methods on acceleration signals
评价指标Evaluation indexes坐标轴Coordinate axis小波阈值Wavelet thresholdCEEMDANCEEMDAN+小波阈值CEEMDAN+Wavelet thresholdX13.592 310.170 713.445 6信噪比SNRY11.153 37.962 610.976 4Z28.094 023.727 427.632 6均值17.613 213.953 617.351 5X0.046 70.067 80.047 3均方根误差RMSEY0.049 20.071 00.050 3Z0.039 20.065 50.041 3均值0.045 00.068 10.046 3
CEEMDAN降噪后信号的SNR最低,RMSE最高,原因是其直接将高频分量去除,忽略了其中的部分有用信号。对多段加速度信号降噪发现,小波阈值法与CEEMDAN结合小波阈值法对部分数据段的降噪效果相近,但某些数据段采用小波阈值法的降噪效果更好,与已有研究比较小波阈值法、CEEMDAN结合小波阈值法对模拟信号和GNSS变形信号的降噪效果得到的结果不同。究其原因,主要是小波阈值法与CEEMDAN结合小波阈值法对信号的分解方式不同所造成的;由于立体栖架散养蛋鸡在三维空间上的行为加速度信号随时间的变化较大,导致CEEMDAN对其信号分解时存在一定的不稳定性。CEEMDAN分解在对散养蛋鸡不同行为加速度信号进行降噪过程中存在的不足之处包括:1)端点效应和包络过冲;2)分解后易出现虚假分量;3)CEEMDAN分解后模态分量IMF中存在残余噪声。随机选取的编号6蛋鸡05:00:00—05:10:00时间段内X
轴原始信号与该信号经小波阈值法降噪后的信号见图2。可以看出,小波阈值法在去除噪声的同时,也可很好地保留信号细节信息。因此从整体上看,小波阈值法更适用于立体栖架散养蛋鸡行为加速度信号降噪,降噪后信号的SNR更高,RMSE更低。

图2 小波阈值法对编号6蛋鸡05:00:00—05:10:00 X轴加速度信号的降噪结果Fig.2 Denoising result of No.6 laying hens’ X-axis acceleration data from 05:00:00 to 05:10:00 by wavelet threshold
2.3 小波阈值法中不同阈值的降噪效果
蛋鸡行为加速度信号经小波阈值法中Rigrsure、Heursure、Sqtsolog、Minimaxi 4种阈值降噪后的信噪比(SNR)和均方根误差(RMSE)均值见表4。可以看出,在Heursure、Sqtwolog阈值准则下,小波阈值法的降噪效果相同,但与另2种阈值相比信号的SNR值更小,RMSE值更大;采用Minimaxi阈值准则,信号的SNR和RMSE值大小均处于中间位置;Rigrsure准则下,信号的SNR最高,RMSE最低。这是因为Rigrsure阈值通过极小化阈值准则函数确定,能保留信号更多细节,与曹晏飞等、杜晓冬等研究结果相似。在4种阈值准则下,Rigrsure阈值对蛋鸡行为加速度数据降噪效果更好,因此也被本研究用来对立体散养蛋鸡行为的加速度进行降噪处理。
表4 小波阈值法中4种阈值的降噪效果
Table 4 Four kinds of threshold denoising effects in wavelet threshold method
评价指标Evaluation indexesRigrsureHeursureSqtwologMinimaxi信噪比 SNR17.613 216.683 916.683 916.701 2均方根误差RMSE0.045 00.050 10.050 10.050 0
2.4 6种行为的加速度标准差分布
加速度标准差可以反映蛋鸡的运动水平。本研究中蛋鸡在立体空间的趴卧、站立、采食、饮水、行走、跳跃6种典型行为的X
、Y
、Z
轴加速度标准差频率分布见图3:6种行为X
、Y
轴加速度标准分布呈4个类别。蛋鸡行走与采食、饮水行为的Z
轴加速度标准差分布与X
、Y
轴分布不同,因为行走是水平面内运动,背部在Z
轴方向运动幅度较小,采食、饮水是双腿站立啄取食物,背部在Z
轴方向运动幅度也较小,表明Z
轴加速度标准差不利于体现蛋鸡行走与采食、饮水行为差异。因此,本研究根据X
、Y
轴加速度标准差分布将蛋鸡典型行为活动分为趴卧和站立、采食和饮水、行走、跳跃4类。与Kozak等将蛋鸡行走、跳跃行为活动水平归为同一类别不同,本研究中由于立体栖架散养蛋鸡跳跃距离远、幅度大,跳跃行为活动强度较行走行为更高,故将行走和跳跃行为分成2类。统计分析蛋鸡4类行为X
、Y
轴加速度标准差均值见表5。4类行为活动水平排序为:趴卧和站立<采食和饮水<行走<跳跃。4类行为X
、Y
轴加速度标准差均存在极显著差异(P
<0.001),表明X
、Y
轴加速度标准差均能有效地区分蛋鸡4类行为。因此,未来可进一步研究如何基于单轴加速度信号构建准确率较高的蛋鸡行为分类模型,则可降低数据采集要求,推动监测设备向小型化和实用化方向发展。
图3 蛋鸡6种行为X、Y、Z轴加速度标准差频率分布Fig.3 Frequency distribution of X-, Y- and Z-axis acceleration data standard deviations of laying hens’ six behaviors
表5 蛋鸡各类行为加速度标准差
Table 5 Standard deviations of acceleration of laying hens’ behavioral categories
坐标轴Coordinate axis趴卧和站立Lying and standing采食和饮水Eating and drinking行走Walking跳跃JumpingP值P valueX轴X-axis0.04±0.01 a0.16±0.05 b0.28±0.10 c0.76±0.17 d<0.001Y轴Y-axis0.04±0.01 a0.14±0.04 b0.22±0.07 c0.76±0.18 d<0.001
注:同行不同小写字母表示0.1%水平差异显著。
Note: Different lowercase letters from the same sow indicate significant different at the 0.1% level.
3 结 论
本研究比较了小波阈值、CEEMDAN、CEEMDAN结合小波阈值3种方法对多段立体栖架散养蛋鸡行为加速度信号的降噪效果,并分析了立体栖架散养蛋鸡趴卧、站立、采食、饮水、行走、跳跃6种行为的加速度值标准差分布,主要结论如下:
1)小波阈值法比CEEMDAN、CEEMDAN结合小波阈值法能更有效地去除蛋鸡行为加速度信号噪声,降噪效果更稳定。小波Rigrsure阈值降噪效果更好,在降噪的同时能保留更多的细节信息。
2)根据蛋鸡不同行为的X
、Y
轴加速度信号标准差分布,可将蛋鸡行为活动强度由低到高分为趴卧和站立、采食和饮水、行走、跳跃4类,不同类别间加速度信号标准差存在显著性差异(P
<0.001)。