基于AHP/FCA/TRIZ的植保无人机遥控器人机评价与优化
2022-09-21赵树行戚彬王莉李衍豪祝贺高睿童
赵树行,戚彬,王莉,李衍豪,祝贺,高睿童
(山东理工大学 农业工程与食品科学学院, 山东 淄博 255049)
为适应植保农业智能化的需求,植保无人机作业得到了迅猛发展。作为植保无人机重要组成部分的遥控器,人机问题日益突出, 长时间操作植保无人机遥控器给操作者带来腕管综合征、颈椎病等疾病的困扰,产生的累积性伤害也将会降低植保作业效率。植保无人机遥控器是控制植保无人机作业信息反馈的重要工具,目前植保无人机遥控器的设计研发侧重于功能的实现,缺少对植保无人机遥控器人机工效的专门研究。
层次分析法(analytic hierarchy process,AHP)和模糊综合评价法(fuzzy comprehensive appraisal,FCA)作为主观评价的方法,在很多领域被普遍使用,可以根据研究目标的不同,选择相应的使用评价方法。陆瀚等[1]使用模糊理论对公务机客舱座椅进行人机工效评价,评价结果为座椅的改进提供了参考,并且通过用户测试对比验证了模糊理论评价的准确性;徐伟等[2]利用层次分析法对汽车座椅进行主观评价,找到改善座椅舒适度的方向;付自由等[3]通过改进的模糊层次分析法对绿色包装进行评价。
TRIZ理论作为一种解决问题的工具,可实现对产品的优化。王成军等[4]为提高火灾救援效率,通过TRIZ理论实现对抛挂装置的优化,提高了装置的安全性;郜红合等[5]使用TRIZ理论解决了公共扶手的安全问题,设计出一种无接触的扶手。TRIZ与很多理论有互补的效果,苏建宁等[6]将AHP、QFD与TRIZ理论相结合,实现对玫瑰花蕾采摘机的设计,使采摘效率有了很大的提升;张芳兰等[7]对人机产品的设计,证明了TRIZ理论与HOQ(质量屋)结合的可行性。本文基于层次分析法和模糊综合评价法对植保无人机遥控器人机工效进行评价。
1 人机工效评价模型的构建
构建的植保无人机遥控器人机工效评价模型如图1所示。
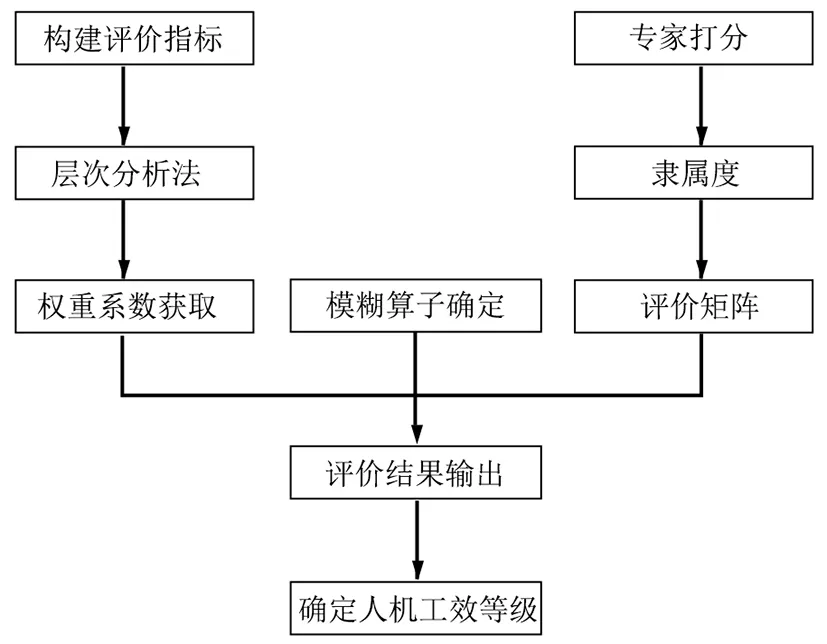
图1 人机工效评价模型Fig.1 Ergonomics evaluation model
1.1 构建模糊综合评价指标
本文将植保无人机遥控器的人机工效作为总目标,即目标层为人机工效,从3个子方面对植保无人机遥控器的人机工效进行评价,即将功能实现、舒适性、外观作为该评价系统的准则层。准则层又细分为9个指标层,见表1。
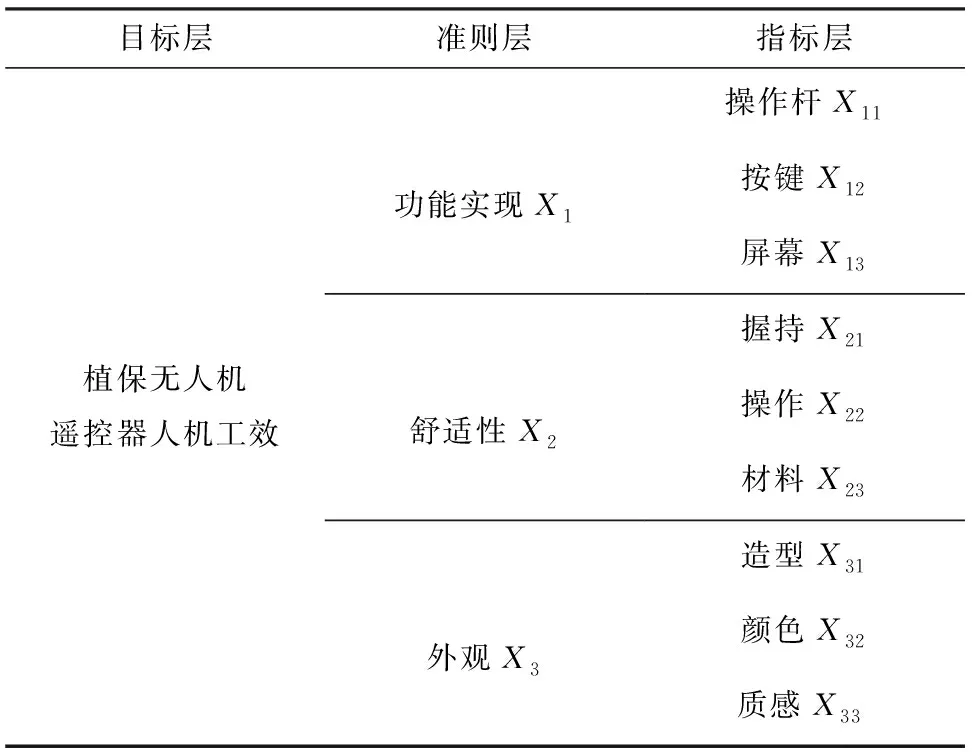
表1 植保无人机遥控器人机工效评价指标体系Tab.1 Ergonomics evaluation index system for plant protection drone remote control
1.2 构建模糊综合评价权重
权重反映了各个指标在评价体系中的重要程度,权重的确定将会影响最终评价结果的科学性,本文使用AHP确定该评价体系的权重[8]。
1)构建判断矩阵
对准则层以及准则层下各个要素进行两两对比,即对同一层的要素i(i=1,2,3,…,n)和要素j(j=1,2,3,…,n)进行两两比较,将对比结果构建成4个矩阵(X、X1、X2、X3),即
(1)
(2)
式中:xij为xi比xj的重要性标度 ,xji为xj比xi的重要性标度,并且xji与xij互为倒数。
矩阵构建完成后,专家分别根据九级标度表[9]对各个矩阵进行重要程度评分,赋予矩阵所需数据。
2)求矩阵特征向量[10]
(a)将判断矩阵的每一列进行归一化,即
(3)
(b)将归一化后判断矩阵按行求和,即
(4)
(c)将求和后的量进行处理,可得权重向量,即
(5)
w=[w1,w2,…,wn]T;
(6)
(d)求最大特征根,即
(7)
3)一致性检验
引入 CI(Consistent index)来判断一致性,即
(8)
为了避免随机误差,判断一致性时要加入一致性指标RI[11](见表2),通过比较CI与RI的比值判断一致性,且

表2 RI 标准值Tab.2 RI standard value
(9)
若CR<0.1,说明矩阵的一致性好,检验通过。
1.3 构建模糊评价矩阵
使用专家评分法确定隶属函数。将植保无人机遥控器的人机工效等级划分为好、较好、一般、较差4个等级,对每个等级进行赋分得评价等级:Z=(8,6,4,2)(见表3)。统计指标层中的某个因素被赋该分的次数,如果打分的人数为M, 则隶属度Rij为
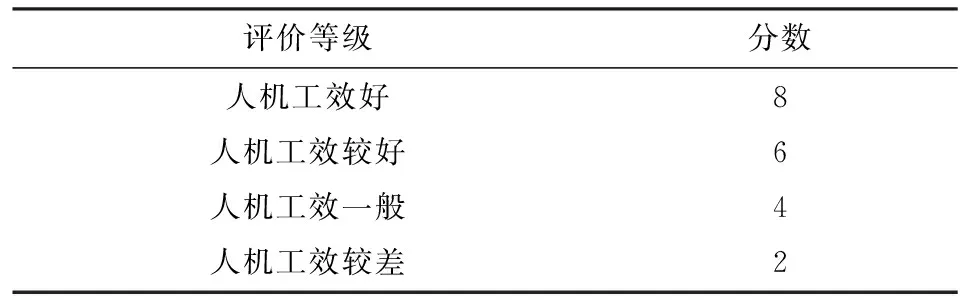
表3 人机工效评价等级及其含义Tab.3 Ergonomics evaluation grade and meaning
(10)
根据专家对准则层和指标层的打分结果构建矩阵,可得到3个3×3的评价矩阵(R1、R2、R3)。
(11)
1.4 评价结果
有界和、 有界积模糊算子可以更好地体现权重,因此将权重因子与评价矩阵合成,即
B=w○R,
(12)
归一化后得到
B=(b1,b2,b3,b4) 。
(13)
通过Z=b1×8+b2×6+b3×4+b4×2可以计算出植保无人机遥控器人机工效的量化评价结果,从而判定遥控器的人机工效等级。
2 评价模型的应用
本文选用植保无人机遥控器作为人机评价与优化的案例,邀请10位人机工效方面的专家和30位飞手,利用构建的植保无人机遥控器人机工效模型(如图2所示)对设计中的植保无人机遥控器进行人机评价,对遥控器的人机工效进行量化分析,以便发现需要进行优化设计的要素。

图2 植保无人机遥控器最初方案Fig.2 The initial plan of remote control for plant protection drones
2.1 人机工效影响因素的权重
根据式(1)、式(2)分别对植保无人机遥控器人机工效评价体系中的准则层和指标层各要素间进行两两对比,得到对应的判断矩阵:
由式(3)—式(7)可得到最大特征值λmax=3.038 5,则准则层权重为
w=[w1,w2,w3]T=
[0.637 0,0.258 3,0.104 7]T。
本矩阵为三阶矩阵,因此RI的值选择0.58,根据式(9)可知,CR=0.037 0<0.1,通过一致性检验。
同理可得植保无人机遥控器评价体系中各指标层的权重,见表4。
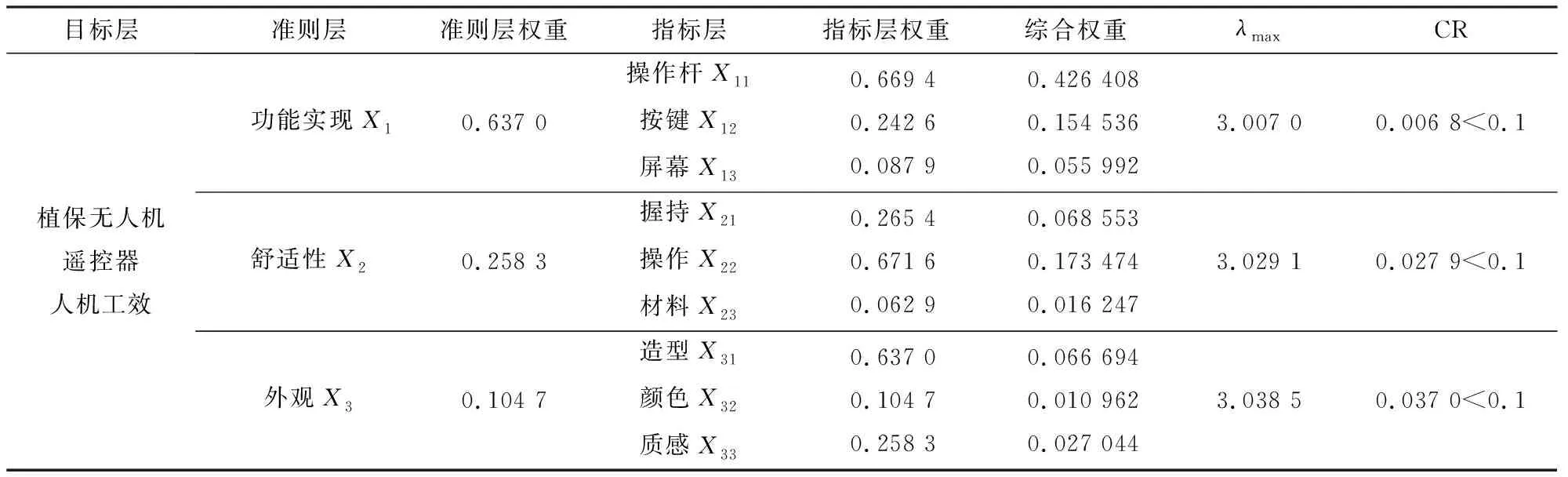
表4 植保无人机遥控器评价体系指标权重Tab.4 Index weights of plant protection drone remote control evaluation system
2.2 构建隶属函数评价矩阵
根据上文所设定的评价标准,邀请10位人机方面专家和30位飞手对影响植保无人机遥控器人机工效的每个因素进行评分(专家评分一次代表两人次),对评分结果进行汇总,由式(11)构建隶属函数评价矩阵。
2.3 评价结果
由式(12)将植保无人机遥控器人机工效评价系统中各评价指标权重因子与隶属函数评价矩阵进行合成,结合评价标准,得出产品评分,确定人机工效等级。
w1○R1=(b11,b12,b13,b14)=
(0.215 970,0.179 068,0.322 946,0.281 886),
w2○R2=(b21,b22,b23,b24)=
(0.352 474,0.284 922,0.177 190,0.185 314),
w3○R3=(b31,b32,b33,b34)=
(0.241 854,0.174 206,0.305 130,0.278 810),
(0.254 312,0.205 901,0.283 451,0.256 619)。
可得出该产品被约25.43%的专家评为8分,约20.59%的专家评为6分,约28.35%的专家评为4分,约25.66%的专家评为2分。
计算可得该产品最终评分为Z=4.92,评分介于4和6之间,更接近4分,故该产品最终人机工效评价等级为一般。
3 评价结果的优化
植保无人机遥控器最终人机工效等级是指标层权重和指标层人机工效评分共同作用的结果,综合指标层权重系数和指标层人机得分可确定需要优化的指标,使用TRIZ理论对待优化指标进行优化,最终将优化模型带入评价体系可得出优化后的人机工效等级,优化模型如图3所示。
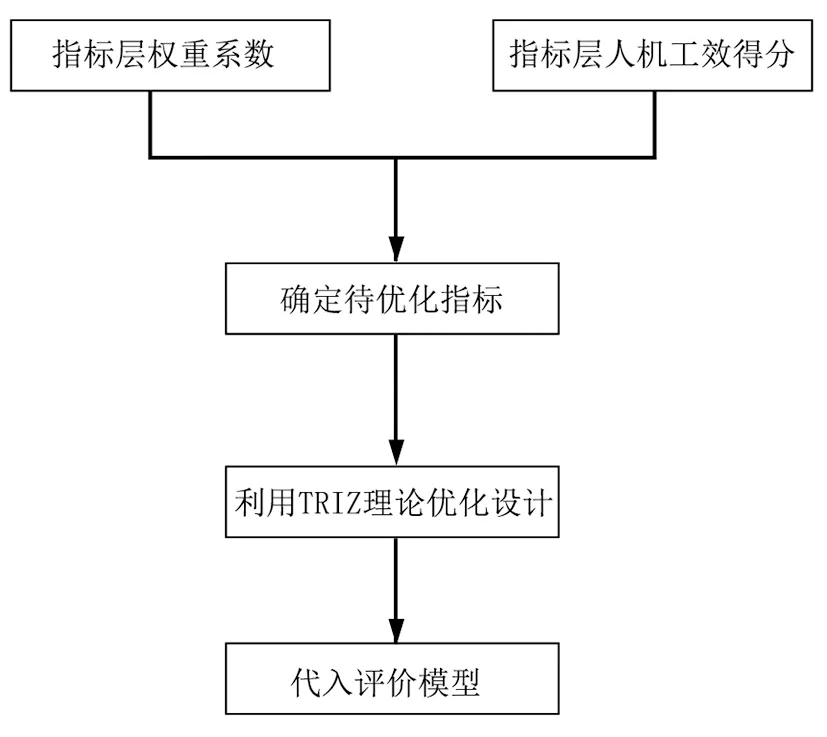
图3 植保无人机遥控器优化模型Fig.3 Optimization model of remote control for plant protection drone
对各因素权重比较(如图4所示)可知,操作杆所占的比重最大,结合指标层人机工效得分(如图5所示)可知,对操作杆的改良可最快速提升植保无人机遥控器的人机工效综合评分。TRIZ对产品所存在的物理矛盾和技术矛盾有对应的40个原理,能为指标层相关要素的优化提供方向,可使用TRIZ解决待优化要素中的矛盾冲突对产品进行优化[7],最后使用模糊层次法对优化后的产品进行重新评价。
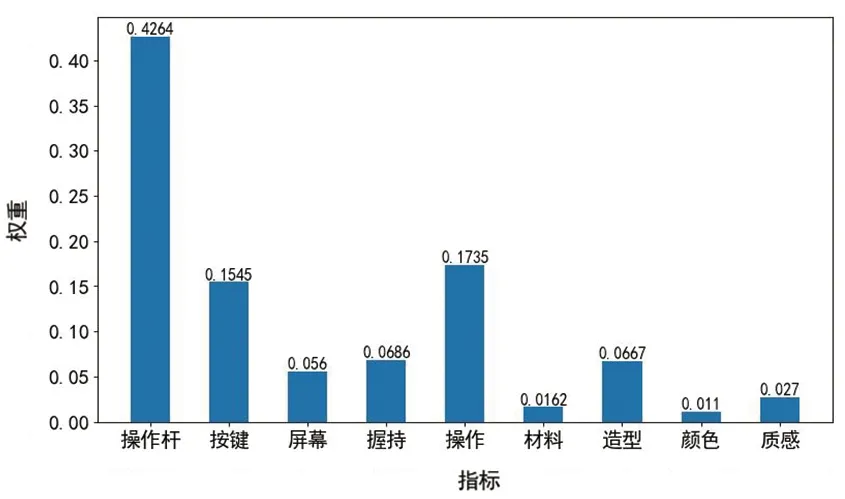
图4 指标层综合权重Fig.4 Comprehensive weight of index layer

图5 指标层人机工效评分Fig.5 Man-machine ergonomics score at the index level
TRIZ解决问题的流程如图6所示,通过将待解决的具体问题转化为TRIZ中典型问题,发现其中矛盾,并找到对应的原理,根据所提供的典型问题解决方案找到具体问题的解决方案[12]。
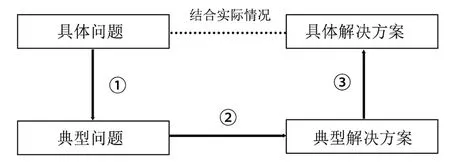
图6 TRIZ 解决问题的基本流程Fig.6 The basic problem-solving process of TRIZ
3.1 操作杆设计
根据TRIZ,当一个技术参数导致另一个技术参数的恶化,就形成了矛盾,可以建立冲突矩阵找到合适原理解决。在操作杆系统中,操作杆的准确性与手指的舒适性为具体矛盾冲突,可将其转化为TRIZ中的典型冲突,参考39个通用技术参数,操作杆的准确性对应27号通用参数“可靠性”,手指的舒适性对应31号通用参数“物体产生的有害因素”,根据矛盾矩阵推荐的原理可找到具体解决方案(见表5)。
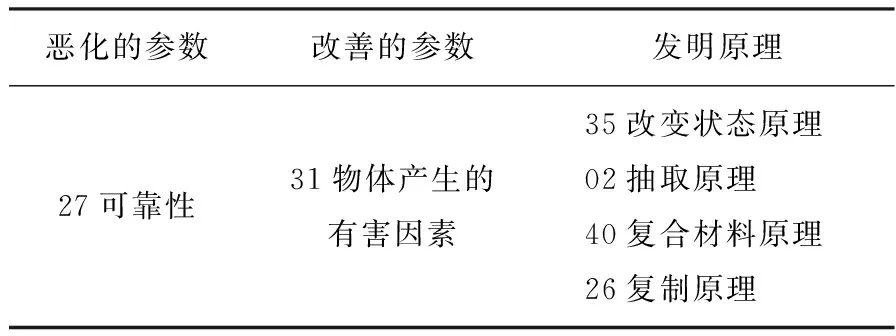
表5 矛盾矩阵Tab.5 Contradiction matrix
选择40号原理,使用复合材料,操作杆上端与两侧改用硅胶涂层,主体为金属杆(如图7所示),几乎不改变操作杆硬度。手指中心接触硅胶,边缘接触金属,能保证无人机控制准确稳定情况下减少对手指的作用力。
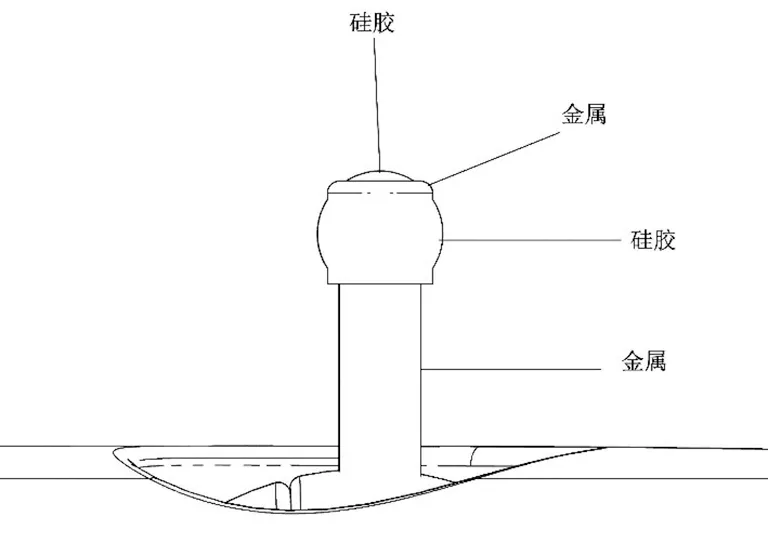
图7 操作杆设计Fig.7 Joystick design
3.2 优化结果
对植保无人机遥控器的操作杆进行优化设计,将金属与硅胶拼接,硅胶表面做颗粒状突起,在保持手指舒适的同时还能起到防滑的作用;硅胶的颜色为黑色,可以消除对颜色这一指标评分的影响,最终产品效果图如图8所示。

图8 优化后植保无人机遥控器方案Fig.8 Optimized remote control solution for plant protection drones
使用建立好的人机工效评价体系重新对优化后的植保无人机遥控器进行评价,操作杆专家评分由4.76提升到6.56,总人机工效评价分数由4.92提升到5.68,人机工效等级接近较好。
本文仅针对对评价结果影响最大的指标进行优化,效果理想,证明了该方法对提升产品人机工效的可行性。在产品的优化阶段可参考此流程,根据对最终人机评价结果影响程度从高到低进行优化。
4 结论
为提升植保无人机遥控器的人机工效,基于层次分析法和模糊综合评价法对植保无人机遥控器进行人机工效评价,并通过TRIZ对评价结果进行优化。主要结论如下:
1)对操作杆的优化使植保无人机遥控器的人机工效分数由4.92提升到5.68,实现了人机功效等级的提升,证明了TRIZ的有效性及在多方法研究中的互补作用。
2)使用层次分析法确定权重,一定程度上弱化了主观因素对评价结果的影响。
3)建立的植保无人机遥控器评价及优化体系,可为植保无人机遥控器决策阶段提供参考,找到不足并进行优化。
