基于线性自抗扰改进单周期控制*
2022-09-21万陆峰徐玉珍
万陆峰, 徐玉珍
(福州大学 电气工程与自动化学院, 福建 福州 350108)
0 引 言
随着近年来新能源应用领域的不断扩展,高增益升压DC-DC变换器的应用越来越广泛,对其动态特性的要求也逐渐提高[1-3]。新能源系统的特点是输入电压低、变化范围宽,而传统的升压变换器由于电路中各种寄生参数的影响,在实际应用中其增益有限且不能长时间工作于极限条件下,因此高增益升压DC-DC变换器的控制方法是近年来电源领域的研究热点之一[4-5]。文献[6]提出一种可扩展单元的高增益升压Cuk变换器,稳态时其电压增益随着增益单元的增加是传统Boost变换器增益的数倍。单周期控制技术是近年来提出的一种非线性大信号控制策略,具有调制和控制双重作用。当输入电压发生扰动时,变换器可在一个开关周期内调节占空比以稳定系统输出[7-8]。这种控制技术利用了开关变换器的脉冲特性和非线性特性,实现了对斩波电压或电流平均值的即时控制,具有反应速度快、鲁棒性好、抑制输入电压波动能力强等特点[9-13]。虽然单周期控制能在一个开关周期内实现跟踪参考信号,但变换器功率开关器件的压降以及寄生参数影响,单独使用单周期控制电路输出值精度不高,且存在系统受到扰动时,其输出电压会产生一定的偏差,无法实现理论上的完全抑制[14-15]。文献[16]实现了在一个开关周期内较好地抑制输入电压扰动的目标,但变换器抗负载扰动能力仍需提高。文献[17]提出一种通过采样输出电压和输出电容纹波电流作为反馈信号的单周期控制方法,提高了负载扰动时系统动态响应速度,但存在输出电容纹波电流采集困难,且易受干扰等不足,因此限制了该方法在实际场合中的应用。文献[18]研究了单周期控制技术的电压调整率,并结合PI或PID控制器形成双闭环单周期控制,即外环PI电压环,内环电流环单周期控制,该方法能够较大程度对负载调整率进行改善。这种双闭环系统虽然减小了变换器稳态误差,扩大了负载调整范围,但PI控制器对开关误差校正能力有限,不能实现系统最优动态响应的目标。针对以上存在的问题,本文结合线性自抗扰技术(Linear Active Disturbance Rejection,LADRC),把系统的未建模动态和未知扰动作用都归结为对系统的“总扰动”而进行观测并予以补偿,使系统控制具有更优的快速性、鲁棒性和适应性。
为了验证基于LADRC改进单周期控制策略对变换器受扰动时的动态性能改善,本文采用MATLAB/Simulink软件进行仿真研究,并与传统的PI单电压环控制、PI双闭环单周期控制进行比较,并搭建了一台高增益升压Cuk实验样机进行实验研究。
1 高增益Cuk变换器单周期控制原理
本文所采用的单周期控制高增益升压Cuk变换器,是在落地升压型Cuk电路基础上,通过添加可扩展单元增益网络而获得。单周期控制高增益Cuk变换器如图1所示。该变换器是由输入电压源Uin,电感L1、L2,开关管VT1,二极管VDB,中间电容CB,输出滤波电容Co,输出负载RL以及电容C1、C2和二极管VD1、VD2组成的增益网络。

图1 单周期控制高增益Cuk变换器
由文献[6]可知,变换器稳态时,电感在一个开关周期内伏秒平衡。当变换器输入电感电流iL1工作在CCM模式下时,其输入、输出电压关系为
(1)
设变换器输入等效电阻为Re,输入电流为iin(t),则输入电流iin(t)可表示为
(2)
结合式(1)和式(2)可得
(3)
式中:Rs——电流采样电阻。
令
(4)
式中:Uref——输出电压参考值。
将式(4)代入式(3)可得
Um(1-d)=2iin(t)Rs
(5)
若输入电感足够大,忽略纹波的影响,则在一个开关周期内式(5)可改写为
(6)
式(6)为单周期控制变换器工作在CCM模式下的数学关系式,采用恒频控制时,假设开关周期为Ts,则根据式(6)可构造出变换器后沿调制控制方程为
(7)
式(7)可通过积分复位电路来实现,其中Ui=Rsiin(t),U-=Um-2Ui,U+=UmD,积分时间常数R1C1等于触发时钟Clock的周期时间Ts。积分复位电路如图2所示。

图2 积分复位电路
以变换器开关管占空比d的后沿进行调制,单周期后沿调制波形如图3所示。

图3 单周期后沿调制波形
图3中,Um是输出电压环路的输出信号,积分器具有快速复位功能,其积分常数R1C1通常设置为开关周期Ts,恒定频率的时钟脉冲信号 Clock 的每个周期的上升沿为RS触发器提供置位的触发信号,开关管VT1开通,积分器从零开始对Um进行积分,U+(t)开始逐渐上升,同时U-(t)开始随着等效输入电流iin(t)上升而下降。当U+(t)等于U-(t)时,比较器翻转为RS触发器提供复位动作信号,开关管VT1关断,积分器复位且保持为零,直到下一个时钟周期到来重复上述过程。整个积分时间为dTs,则在每个开关周期的开关管占空比都满足:
(8)
2 变换器单周期小信号建模
根据图1变换器双闭环单周期控制结构,进行单周期小信号建模研究,由于单周期控制是大信号非线性控制策略,不适合用传统的状态平均法进行建模分析,此处将变换器电路作为一个完整的系统进行分析。稳态运行时,单周期控制高增益Cuk变换器的开关频率fs远高于输入电压频率fin。由前述单周期控制理论分析可知,即
(9)
式中:doff——开关管关断占空比。
其中,由式(2)、式(3)可得
(10)
由式(4)可知,稳态时,Re的稳态值为
(11)
式中:Re——输入负载大小的等效电阻。
由式(10)可得单周期控制高增益Cuk变换器输入等效电路。变换器输入等效电路如图4所示。
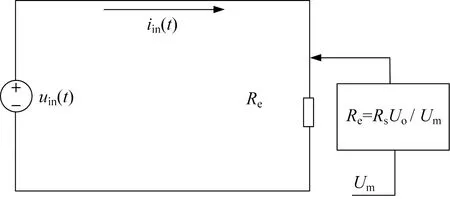
图4 变换器输入等效电路
理想情况下假设整个系统无能量损耗,即
(12)
根据假设可以建立单周期控制高增益Cuk变换器大信号模型。变换器大信号模型如图5所示[19]。

图5 变换器大信号模型
由图5可知,从输入侧看,整个系统可视为一个等效输入电阻Re;从输出侧看,整个系统可视为一个等效电流源,Re将输入端吸收的能量传输到输出端。
将式(11)代入式(12),可得输出电流的稳态值Io为
(13)
根据式(13),可以求出每一个变量的小信号分量对输出电流的响应,建立时变模型为
(14)
分别对uo、uin和um求偏导,可得单周期控制变换器电路的小信号模型为
(15)
由式(15)可整理得到
(16)
将式(11)和式(12)代入式(16)可得到
(17)
可将式(17)表示为
(18)

由式(18)可得,变换器单周期控制小信号模型如图6所示。
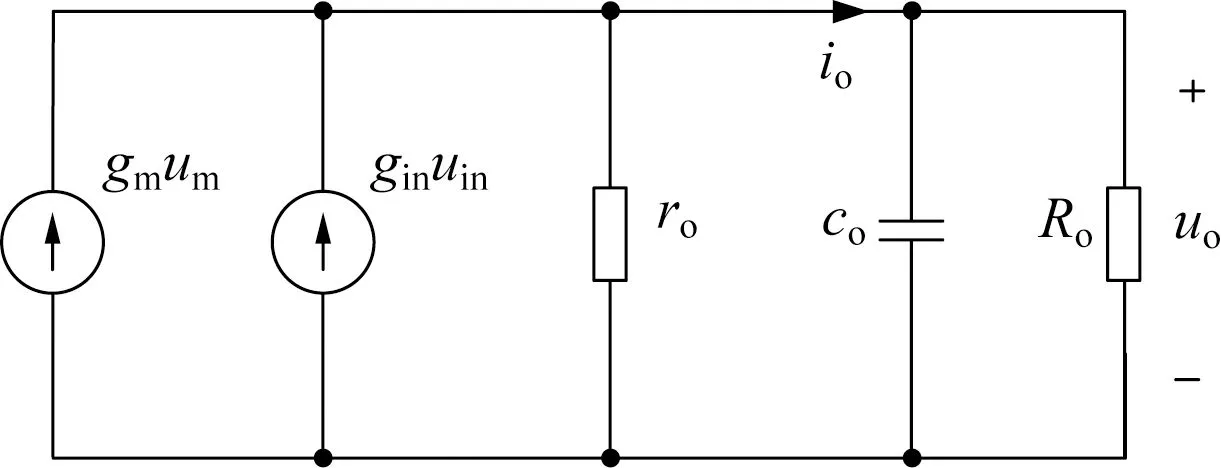
图6 变换器单周期控制小信号模型
由变换器单周期小信号控制模型可知,uo(s)/um(s)的传递函数Gs(s)可以表示为
(19)
将式(19)可整理得到
(20)
式中:ωp——变换器的极点角频率。
其中,
(21)
单周期控制升压Cuk的电压环小信号控制框图如图7所示。
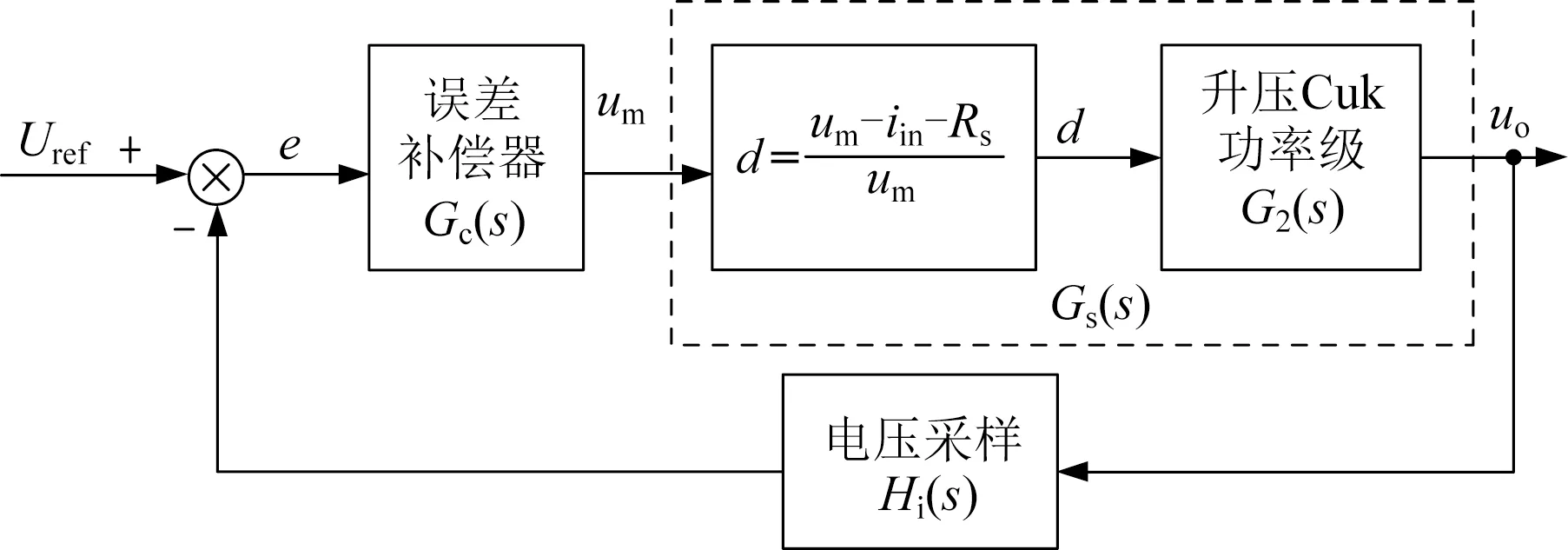
图7 单周期控制升压Cuk的电压环小信号控制框图
3 基于LADRC的改进单周期控制器设计
3.1 线性扩张观测器(LESO)设计
线性扩张状态观测器(LESO)是状态观测器中的一种。由龙伯格提出的状态观测器理论,解决了在确定条件下受控系统的状态重构与观测问题。而系统的状态变量并不都是易于直接检测到的,LESO参考龙伯格构造观测器方式,结合自抗扰的思想,将被控系统与积分串联型系统不同部分集成总扰动,扩张成下一阶的状态量并对其进行观测,这样需求的系统信息极少(仅需要知道系统的相对阶次和输入前项系数的大致数值),可以视为一种无模型的方法,通过合理调整线性扩张观测器(LESO)的带宽,可以使得变换器闭环系统的鲁棒性、适应性更加良好。
(22)

λ(s)=s2+l1s+l2=(s+ω0)2
(23)
式中:ω0——二阶LESO的带宽。

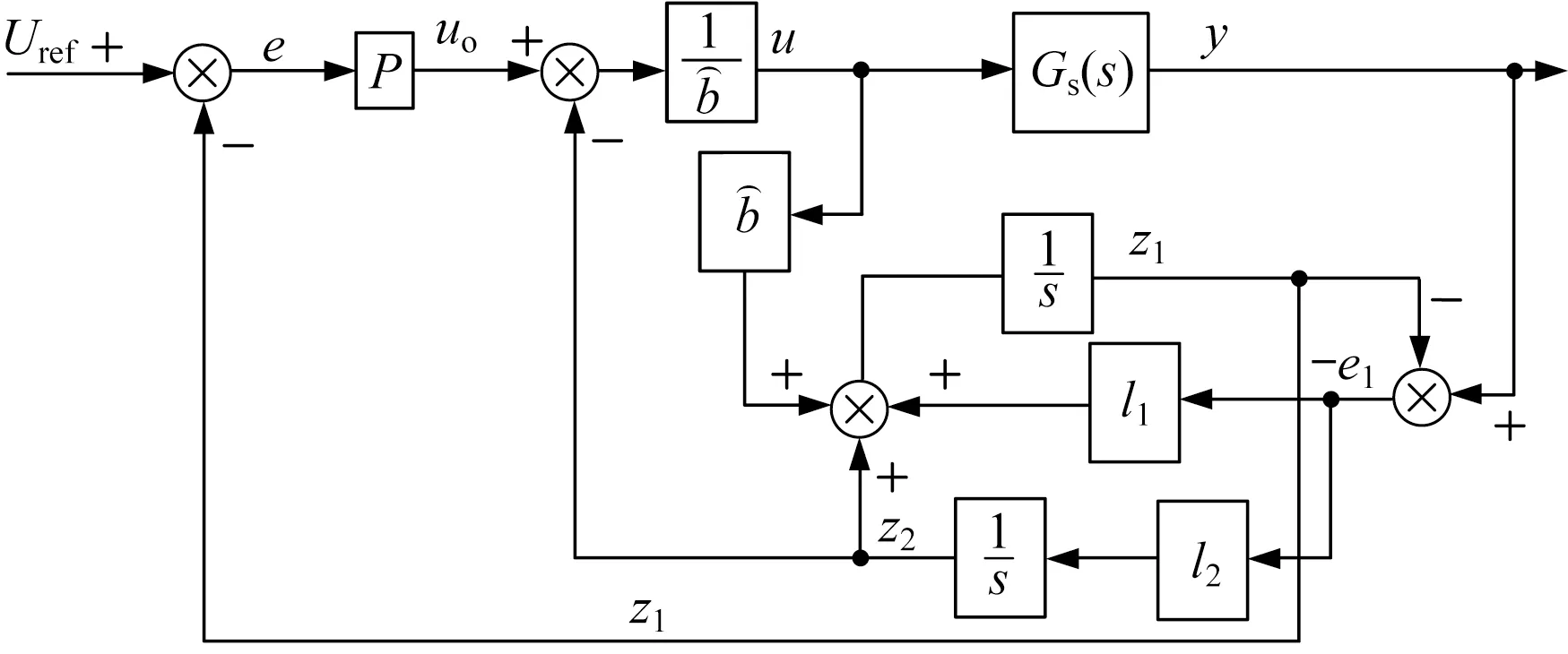
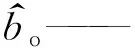
图8 变换器LADRC控制结构框图
由图8可以推出z2的表达式为
(24)

(25)


图9 的Bode图
3.2 线性状态误差反馈控制律(LSEF)设计
线性扩张状态观测器(LESO)能够实时估计并补偿外部与内部扰动,因此传统PI中在常值扰动下为消除静差而采用的积分器已不必要,其线性状态误差反馈控制率可进一步简化为PD组合的设计[22-23]。但在高频情况下,PD控制器中微分作用基于误差变化过于灵敏,严重时会导致系统的震荡,所以在高频PWM控制中PI控制器应用更加广泛。本文为防止高频时微分控制而带来的系统震荡,简化控制过程,将线性状态误差反馈控制率简化为P控制器的设计,该线性ADRC可采用的P控制器为
(26)
取反馈控制量为
(27)
式中:Uref——控制器电压给定值;
z1、z2——来自LESO中观测器状态;
kp——比例(P)的放大系数。
4 仿真与实验
4.1 电压环路补偿
为更好地进行对比实验,对基于PI双闭环单周期控制升压Cuk环路进行校正,并将校正后的变换器与基于线性自抗扰改进单周期控制策略做仿真对比分析。图7中Gc(s)是单周期控制PI调节器的补偿传递函数,Gs(s)是PI控制器输出信号um至输出电压uo的传递函数,H(s)为输出电压采样系数ku。
根据单周期小信号建模结果,未加环路补偿时,原始环路增益函数Go(s)为
(28)
电压环未加补偿时环路增益函数Go(s)的Bode图如图10所示。
由图10可知,未加入补偿时的环路增益小于1,无穿越频率,会导致环路不稳定。因此,需要加入PI补偿网络对原始环路进行补偿。PI调节器的补偿传递函数Gc(s)为

图10 电压环未加补偿时环路增益函数Go(s)的Bode图
(29)
式中:Kp——比例系数;
Ti——积分时间常数。
其中,ωz=1/Ti。
加入PI补偿器后,电压环的开环传递函数为
(30)
为了改善闭环系统的稳定性和减少开关噪声的影响,变换器的相角裕量一般取γ>45°,增益交越频率fg 图11 电压环加入补偿后环路增益函数G(s)的Bode图 由图11可见,补偿后,单周期控制升压Cuk变换器增益交越频率为fg=14.06 kHz,系统的动态响应速度变快,相位裕量为γ=45.2°,系统稳定。因此,PI补偿网络参数Kp=65,Ti=0.001 5,能够对单周期控制升压Cuk变换器进行有效补偿。 为了验证前述理论分析的正确性,搭建了MATLAB仿真模型。主要电路仿真参数如表1所示。 表1 主要电路仿真参数 为了验证理论分析的正确性,本文进行了动态仿真,并分别与传统的PI单电压控制策略和双环改进单周期控制进行了对比。 满载时,输入侧电压uin从36 V阶跃到60 V再跌落至36 V,输入电压变化时uo仿真波形如图12所示;输入侧电压稳定36 V时,输出负载从满载跃变至半载,再跃变至满载,负载变化时uo、io仿真波形如图13所示。 图12 输入电压变化时uo仿真波形 图13 负载变化时uo、io仿真波形 由图12和图13可知,无论在输入电压和还是输出负载阶跃变化时,所提出的基于线性自抗扰改进单周期控制策略比较传统的PI单电压环控制和双闭环单周期控制电压过冲更小,恢复时间更短。 设计了1台额定功率为100 W的实验样机进行对比研究,实验样机如图14所示,所需主电路参数和功率器件的型号与表1中相同。 图14 实验样机 3种控制方式下输入侧电压uin在36 V与60 V之间跳变时,变换器输出电压变化。输入电压变化时uo动态响应如图15所示;相关动态性能比较如表2所示。由表2可知,相比较于传统PI单电压环控制策略和基于PI双闭环改进单周期控制策略,当输入侧电压uin从36 V阶跃到60 V时,又跌落到36 V时,所提控制策略具有输出电压uo过冲电压和跌落电压更小、稳态恢复时间更快的特点。 表2 输入电压阶跃动态性能比较 图15 输入电压变化时uo动态响应 3种控制方式下输出负载在满载(0.5 A)与半载(0.25 A)之间跳变时,变换器输出侧电压变化uo动态响应如图16所示;动态性能比较如表3所示。可以看出,当负载io从满载(0.5 A)突变到半载(0.25 A)时后又恢复到满载(0.5 A),基于线性自抗扰改进单周期控制策略相比较于采用传统PI单电压环控制策略、基于PI双闭环改进单周期控制策略,具有输出电压uo过冲电压和跌落电压更小、恢复稳态时间更快的特点。 图16 输出负载变化时uo动态响应 由图15、图16和表2、表3可见,变换器在输入电压和输出负载阶跃变化时,基于LADRC改进单周期控制策略电压过冲更小,恢复时间更短,在动态过程中具有更好的性能。 表3 输出负载阶跃动态性能比较 本文提出并研究了一种基于LADRC改进单周期控制策略(即内环电流环单周期,外环电压环),解决了传统基于PI双闭环单周期控制技术中系统响应快速性、非线性特性以及时变扰动的作用不佳等问题。通过理论分析,仿真和实验研究得到如下结论: (1) 对高增益升压Cuk变换器建立了单周期控制方程和单周期小信号模型,对基于PI传统双闭环单周期控制中最重要的PI控制器进行了设计。 (2) 结合自抗扰控制后,在系统受扰动的情况下,负载电压变化比较于基于PI双闭环单周期控制和PI单电压环控制更小,恢复时间更快,较好地实现了当系统在受干扰时更有效地抑制系统扰动,提高变换器的动态性能,使系统具有更良好的鲁棒性。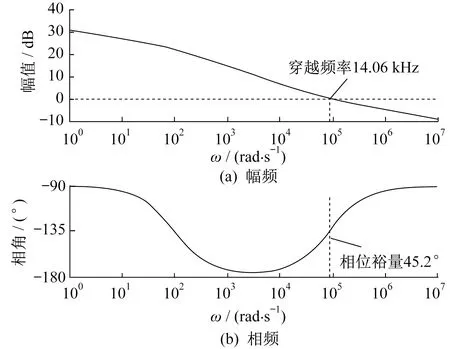
4.2 仿真分析

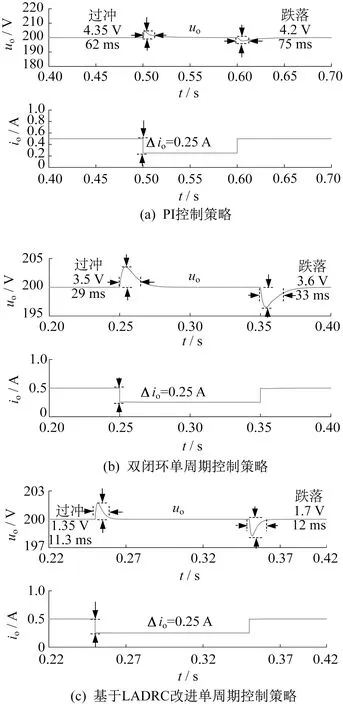
4.3 实验分析





5 结 语
