智能巡检机器人在变电站中的应用研究
2022-09-21云鼎科技股份有限公司郭洪杰
云鼎科技股份有限公司 郭洪杰
近年来,我国电力行业有着快速的进步与发展,变电站作为电力资源供应的重要组成部分,在变电站巡检工作开展的阶段中,对工作人员自身的专业素质能力有着较高的标准和要求。但是从现阶段实际的情况来看,高素质、高技术的检修工作人员数量稀少,很难满足市场的基本需求。
当前,我国也在不断加强对该方面的研究和改善。智能巡检机器人的出现,不仅能够加强日常变电站检查巡视工作的效率和质量,并且其自身还具备视频影像、图像识别、红外测温、数据采集等多种功能,更好的帮助变电站工作人员对相关数据信息的全面掌握,及时对故障问题进行反应和维修,减少安全事故的发生。同时,加强智能巡检机器人的应用,能在一定程度上提升变电站日常工作的智能化与现代化水平,并且变电站工作人员可以远程对变电站设备进行操控,及时改善和解决问题。
1 智能巡检机器人的相关概述
智能巡检机器人是在智能化系统结构的基础上,将识别技术、计算技术、信息处理技术、信息整合技术等多种处理技术进行整合,使机器人更加具有智能化和自动化的效果,为智能巡检机器人提供更多的功能保障,确保日常巡检工作的顺利开展。在智能巡检机器人实际使用的过程中,需要对变电站内实际的情况数据信息进行获取,及时对数据信息进行处理和存储,对变电站内存在的异常问题进行改善,制定相关的异常检测报告,为工作人员后续维护与检修工作的开展创造良好的参考条件,为管理工作人员提供更加优质优良的管理基础数据。
传统变电站日常巡检工作开展过程中,不仅会消耗大量的成本,还会给工作人员带来一定的安全隐患。并且由于人工巡检时间受到限制,多数新能源场地的监控管理需要采取集控的方式,少人或者无人值班都会给变电站日常运行造成一定的影响。为了能够更好地实现变电站全天候的巡检工作,就需要配备大量的运行维护工作人员,但是由于员工之间缺乏经验而导致无法全面落实巡检工作,同时人工巡检的精准程度很难得到有效的保障,对已经发生故障的设备不能及时开展维修,导致变电站实际运行效果受到严重影响。
为了能够更好地保证智能机器人巡检工作开展的质量和效果,通过使用传感器确保智能机器人在巡检工作开展的过程中,可以对不同变电设备的运行情况,以及变化趋势进行探测和数据采集,更好的保证检修工作开展的精准度,并且机器人能够保持全天候巡检工作,有效地减少工作疲劳情况的产生,进而提升巡检工作的安全性以及可靠性[1]。
2 智能巡检机器人的系统构成
2.1 智能巡检机器人的系统结构
现阶段,在变电站中使用的智能巡检机器人系统,主要分为四个层次,本文在此针对现阶段使用的四个主要层次系统进行分析,希望能对今后智能巡检机器人的使用提供有效参考,如表1所示。
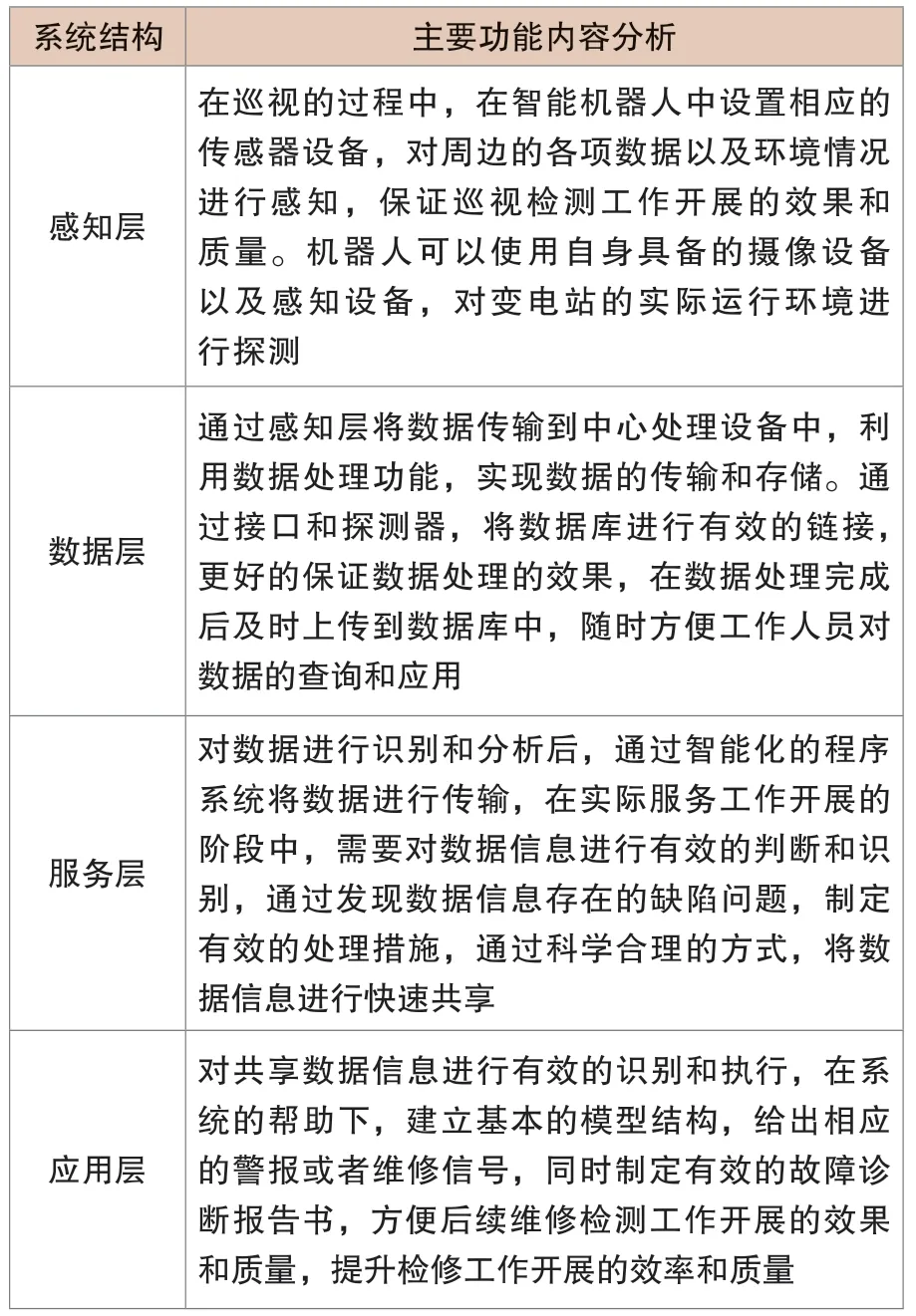
表1 智能巡检机器人系统结构分析表
2.2 智能巡检机器人的控制系统
在变电站智能巡检机器人运行过程中,需要保证机器人控制的效果和质量,从目前实际的情况来看,在现阶段智能巡检机器人使用中,主要有两个控制的基本系统,本文在此进行简要的阐述和分析,希望能对今后智能巡检机器人的使用提供良好的保障。
2.2.1 基站控制系统
在基站控制系统中,因为需要保证人工远程操作的效果和质量,在实际工作开展过程中,就需要不断加强工作人员的计算能力,利用相应的设备确保计算数据结果的真实性和有效性,从而更好地对智能巡检机器人下达有关的指令。在实际工作开展过程中,需要对智能巡检机器人工作的路线和时间进行控制,保证机器人能够按照标准程序和规定,开展日常的检修工作,避免工作疏忽或者遗漏情况的出现,加强数据处理的结果和质量[2]。
2.2.2 自主控制计算机系统
智能巡检机器人在实际工作中,需要加强核心设备的控制与管理,利用导航系统对实际检测路线进行确定,避免路线错误问题导致实际巡检工作开展效率受到影响。在实际工作开展过程中,相关人员需要将监控数据信息与导航数据信息进行有效地结合,进一步加强巡检路线规划设计的效果,确保工作开展的控制效果以及规范效果,并且加强监控与检测过程,确保巡检工作的各个环节中全面落实,更好地对变电站实际运行情况和数据信息进行快速收集和分析。
3 智能巡检机器人的应用关键技术分析
3.1 导航定位技术
智能巡检机器人在使用的过程中,可以有效地将导航定位技术进行应用,不仅能够保证智能巡检机器人工作路线的明确规定,还能及时对机器人的位置进行确定,更好的保证机器人能在规定的路线范围内移动,确保智能巡检机器人工作开展的实际效率和质量。在对此导航技术进行使用时,相关工作人员需要提前对变电站巡检路线进行有效的设定,同时还需要在规划路线中安装磁性材料,从而更好地保证智能巡检机器人的感应系统和识别系统,避免在巡检工作开展过程中出现偏差问题。
除此之外,在实际工作开展的阶段中,还需要对激光导航技术进行使用,加强对障碍物的识别与检测工作,对智能巡检机器人工作路线进行规划,避免产生碰撞问题,减少安全事故的发生。从现阶段的实际应用来看,激光导航技术的应用效果更加具有灵活性,并且路线规划的准确程度较高,不容易发生意外碰撞的情况是目前智能巡检机器人中较为常见的技术应用类型[3]。
同时,定位导航技术也是智能巡检机器人较为先进的功能要求,在实际工作开展的阶段中,根据制定好的线路进行检测。在智能巡检机器人智能化探测和定位的过程中,还需要加强对无障碍模式的应用,将周边实际的情况进行录入,如果发现路线存在误差问题,需要及时进行调整,将周边实际的杂物进行清理,保证路线的稳定性和安全性。
3.2 检测识别技术
智能巡检机器人自身具备较强的检测识别技术,从而能对变电站内出现的各种不同情况进行快速识别,对环境中产生的信息进行收集,并利用自身的数据处理系统对信息进行有效的分析,了解变电站内故障问题产生的实际原因,及时发现浅存安全隐患,更好的保证变电站运行的安全性以及可靠性。
在巡检工作开展的阶段中,机器人需要利用设备自身携带的识别技术,对变电站内部情况进行检测,对设备开关进行有效的识别,加强设备内外温差的检测情况,对数据进行采集和获取,更好的保证电气设备运行的安全性以及稳定性。在对智能巡检机器人进行使用的过程中,还可以利用识别检测技术,对变电站内部设备运行的实际情况,以及重要设备运行情况进行快速地检测与探测,为工作人员提供更加全面的变电站数据信息,明确站内一次以及二次设备坐标的实际情况,通过展现不同设备的组成情况,更好的保证数据信息具有真实性以及准确性,为实际工作的开展创造良好的基础条件。
除此之外,巡检机器人还配备红外热成像和摄像设备,并且还会对拾音器进行安装,加强此类设备的有效应用,对现场的音频和视频资料进行采集,快速的将数据信息进行传输,保证远程与监控工作的全面开展。加强数据资料的采集效果和质量,在必要的时候对数据信息进行调取,加强对现场的监督与管理工作。与传统监控摄像设备进行比较可以发现,智能巡检机器人的有效使用,不仅能够定时定点的对现场资料进行抓拍,还能够对各种安全问题、风险问题和隐患问题进行识别,及时对安全风险和影响因素进行考虑,减少外界因素对安全生产造成的影响。
3.3 图像识别技术
智能巡检机器人在实际图像检测工作开展过程中,需要加强对图像识别技术的使用,在最短时间内对各项数据进行识别和判断,针对不同时间段内图像的变化情况进行对比,从而对设备运行的情况以及故障问题进行分析和改善。在识别技术和识别系统应用的背景下,还能加快数据获取的速度,保证设备运行的安全性和稳定性。
如果设备温度异常升高,则需要对数据进行分析,从而制定有效的处理措施,确保设备安全稳定运行。如果变电站开关柜出现线路老化的现象后,一些重要组成部件都会出现异常发热的情况,在识别技术和测温技术的应用下,能够对异常温度情况进行检测,对实际故障产生的原因进行判断,同时给出相应的警报,减少安全事故的发生。
3.4 自动充电技术
加强智能巡检机器人的日常巡检工作,是保证变电站正常运行的基础,因此保证机器人的电量,也是确保工作顺利开展的重要基础,也能在一定程度上避免电量下降到标准范围后对实际巡检工作开展的效率和质量造成影响。因此,在对智能巡检机器人设定的阶段中,避免充电问题影响巡检机器人日常工作的顺利开展,还需要保证巡检机器人充电的安全性以及可靠性。除此之外,充电桩还需要设置防触碰等基本功能,避免工作人员在日常工作中不小心触碰到充电桩而产生安全事故,更好地对工作人员的生命安全进行保障[4]。
4 结语
随着现阶段社会经济的不断进步和发展,科学技术以及信息技术都有着全面的改善,智能机器人技术作为现阶段各行业应用较为广泛的技术类型,利用机器人来代替人工进行作业是科学技术发展的主要趋势。现阶段,电力行业发展过程中,有效地将智能巡检机器人在变电站中进行应用,不仅能够提升实际巡检工作开展的效率和质量,还能减少安全事故的发生。
智能巡检机器人能快速有效地对变电站实际运行状态进行检测,并且机器人自身具备的较多优势,也能够快速有效地对故障问题进行分析和判断,加强数据的快速收集,为实际检修工作的开展提供良好的基础保障。同时,有效利用智能巡检机器人完成变电站巡检工作,还能减少操作人员工作失误情况的发生,实现远程操控的目的,更好地提升巡检工作的安全性、可靠性,真正做到减员增效的实际作用,推进我国电力行业快速发展。