莲藕收获机械研究现状与发展趋势*
2022-09-21张佳李锋霞潘江如朱军
张佳,李锋霞,潘江如,朱军
(1. 新疆工程学院机电工程学院,乌鲁木齐市,830023; 2. 新疆鑫力同机械制造有限公司,乌鲁木齐市,830000)
0 引言
莲藕又称芙蕖、荷藕以及芰荷,是一种水生可食用蔬菜作物,莲藕具有很高的药用价值和营养价值,具有广阔的市场前景。我国种植莲藕约3 000多年历史,20世纪90年代开始,我国进一步扩大莲藕种植面积,目前我国莲藕种植面积达4 000 khm2,莲藕种植区域主要集中在中国的江苏、山东、湖南、福建、浙江以及安徽等地区,近些年,新疆以及西藏等地区也开始种植莲藕[1]。随着莲藕产业的不断发展,莲藕收获机械化已经成为莲藕产业发展过程中的薄弱环节,目前,莲藕收获方式主要分为人工收获以及机械收获,人工收获又分为旱田人工采挖以及水田人工采挖,旱田人工采挖通常应用在我国西北部分地区,在莲藕收获前,需要将水田中的水排空,收获时采用铁锹或挖藕铲将藕田中的淤泥翻开使莲藕露出,由人工将其捡拾;水田人工采挖是由人工手持高压水枪将喷头置于淤泥下,借助高压水将其藕周围的淤泥冲散,使其依靠自身浮力漂浮于水面上。这两种方式普遍存在的问题为劳动强度大,收获效率低,已经不能满足莲藕产业的发展需求。机械收获根据其工作原理不同分为铲挖式和喷流式[2],铲挖式收获莲藕原理简单,但收获式容易伤及莲藕,破损率高,影响莲藕品质;喷流式采用高压水流或者气流工作原理,收获效率较高,收获品质较好,但整体来看,莲藕收获机械普遍存在自动化程度低,功能单一的问题[3]。
莲藕收获是莲藕种植产业发展中关键环节之一,随着莲藕产品需求的增加,莲藕种植面积逐渐增大,我国莲藕产业发展存在供不应求和产业化程度低的问题,为提升我国莲藕收获机械化水平,消除莲藕收获装备技术薄弱对莲藕产业发展的阻碍,应综合分析我国莲藕收获机械化水平现状,基于国内莲藕种植产业,坚持自主研发,填补技术空白,研制适用于我国不同区域的莲藕收获装备,对于提高莲藕收获效率,降低人工采挖劳动强度,提高莲藕经济效益,具有非常重要的实用意义[4]。
1 莲藕植物特性与收获要求
1.1 莲藕的植物特性
莲藕属睡莲科,主要成分为淀粉、碳水化合物、蛋白质、维生素、矿物质等,莲藕品种繁多,主要有应城白莲、马口白莲、武植二号、美人红以及鄂莲系列。莲藕按其淀粉含量多少可分为粉藕和脆藕;粉藕的淀粉含量高于脆藕,含水量低于脆藕;按生长期长短分为早熟藕、中熟藕和晚熟藕;按适宜水深种植水位可分为浅水藕和深水藕,浅水藕常种植在水深10~50 cm范围内,如鄂莲四号等品种;深水藕常种植在水深50~100 cm范围内,如新育一号等品种[5]。
莲藕的根状茎通常位于泥土深度20~40 cm范围内,其结构分为主藕以及子藕,主藕节段数与子藕支数、主藕和子藕的分布和位置有明显的规律性,从泥土内莲藕主藕以及子藕的水平分布看,不同主藕以及子藕在泥土内随机分布,无规律,莲藕收获时,有经验的藕农可根据莲藕的藕头或者主藕的位置和走向,大致可判断出单个莲藕在泥土中的分布[6]。
1.2 莲藕的收获要求
莲藕的收获是影响莲藕品质的关键环节,具有收获环境复杂、作业难度大以及收获周期短的特点,泥土内的莲藕错综复杂,收获时极易伤及莲藕,一旦出现破损,内部容易进入泥土,不易清洗,莲藕口感不佳,保存时间短,影响其莲藕品质以及销售价格。此外,每年因大量莲藕未能及时收获,次年腐烂造成极大的经济损失。因此莲藕收获要求包括:(1)严格控制莲藕的破损率,破损率要≤15%,从而提高收获莲藕品质;(2)提高莲藕收净率,收净率≥75%;(3)尽量提高莲藕的收获效率,以缩短收获周期;(4)收获后的莲藕要及时运输、储存[7]。
2 国内外莲藕收获机械发展现状
2.1 国外莲藕收获机械发展现状
除我国以外,莲藕种植地区还在印度、泰国、不丹、锡金、越南以及日本等国家,国外莲藕收获机械的研究主要集中在日本,其他国家人民很少食用莲藕,故未见其他国家有莲藕收获机械的相关研究[8]。
20世纪80年代,日本因莲藕收获作业劳动强度大,劳动力不足等问题,日东工业所研制三种莲藕收获机,分别为Ⅰ型喷流式、Ⅱ型宽幅式和Ⅲ型泵定置式莲藕收获机。Ⅰ型喷流式莲藕收获机,主要由船体、水泵和喷流机构组成,应用于深水藕的收获,喷嘴内径为25.30 mm,工作幅宽为1.8 m,机械总质量为140 kg,通过藕田岸边的钢丝进行牵引前行。Ⅱ型宽幅式莲藕收获机是Ⅰ型的改进版,由船体、水泵、步进牵引装置、驱动装置和集藕装置组成,将行走装置安装在了船体上,操作容易,喷嘴内径为28 mm,作业幅宽为3.6 m。Ⅲ型泵定置式莲藕收获机,由船体、车轮、发动机和扇形旋转喷头组成,喷头与水面倾斜角度为80°,幅宽为1.8 m,此机械需两人操作完成,一人操作机械和收获漂浮上来的莲藕,另一人操作水泵,行走方式可根据不同环境选择自走式或牵引式。Ⅰ型喷流式和Ⅱ型宽幅式莲藕收获机工作效率为200 m2/h,是人工挖藕的4倍,Ⅲ型泵定置式莲藕收获机工作效率为150 m2/h,是人工挖藕的3倍,但由于当时价格较贵,并没有在我国推广使用[9]。
2.2 国内莲藕收获机械发展现状
20世纪70年代左右,我国开始设计研究莲藕收获机械,最先由华中农学院、武汉理工大学等开始研究,最开始通过模仿人工采挖动作,用机械手进行采挖,试验效果不理想。随着莲藕种植规模化发展,对莲藕收获机的需求越来越迫切,国内莲藕收获机的研究逐渐增多,目前应用最多的是喷流式莲藕收获机,喷流式莲藕收获机根据行走方式不同可分为船式、浮筒式、轮式以及螺旋推进式[10],莲藕收获机类型的特点及适用性如表1所示。
表1 机具类型Tab. 1 Types of machines and tools
2.2.1 船式莲藕收获机
船式莲藕收获机通过水泵从水田中抽水,通过喷头向莲藕周围的泥土喷射高压水流,从而将莲藕采挖出来,随后由人工在水面将莲藕捡拾。其代表机型主要有以下两种。
2007年王维[11]设计了一款4SWO-1.2型船式水力挖藕机,如图1所示,主要包括蓄电池、船体、挂钩、卷筒、柴油机、柴油机水箱、摆动机构、分水器以及水枪等部件组成,作业时,在藕田地头固定木桩,将挂钩与木桩连接,由液压马达提供动力,带动卷筒旋转,从而实现船体的行走,由柴油发动机提供动力,带动水泵工作,水泵将高压水流输送至水枪冲刷莲藕周围,将莲藕冲刷后浮出水面;与日本的I型喷流式莲藕收获机相比,两者的收获原理相似,都是采用牵引式移动方式,但该机增加了摆动机构,可以实现喷头的左右摆动,喷头的角度可调,提高了莲藕的收净率。

图1 4SWO-1.2型船式水力莲藕收获机
2008年黄海东等[12]研发设计的一款4CWO-3.2型船式自动莲藕收获机,如图2所示,主要由导向轮、船体、发动机、水泵以及喷水枪等组成,适合在水深20~180 cm范围内作业。入水前需要将导向轮拆除,下水后,由水泵将高压水流从喷嘴喷出,对莲藕进行采挖,其中,喷嘴可实现左右往复移动,将工作幅宽增加到3.2 m。
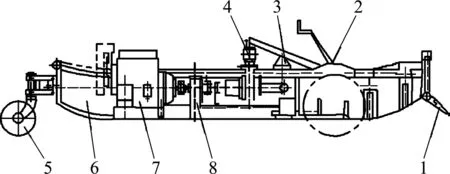
图2 4CWO-3.2型船式自动莲藕收获机
两种船式莲藕收获机具体技术参数如表2所示,与4SWO-1.2型船式莲藕收获机相比,4CWO-3.2型船式自动莲藕收获机在结构上增加了行走叶轮和螺旋桨,船体可在水中行走,收获作业完成后,加装导向轮,可在地面行走。
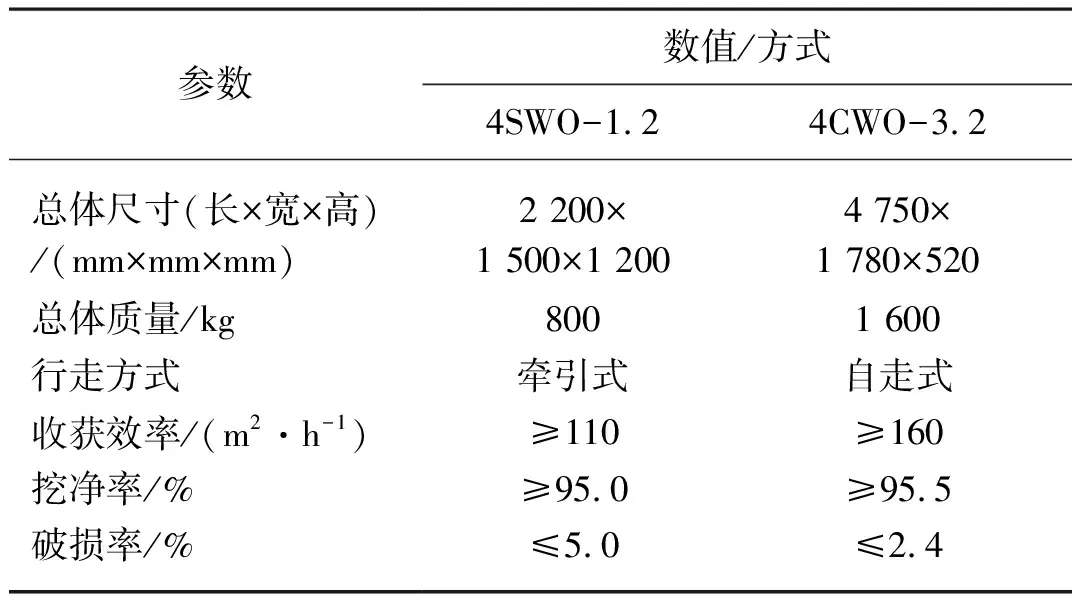
表2 两种船式莲藕收获机的主要性能参数Tab. 2 Main performance parameters of two kinds of ship-type lotus harvester
2.2.2 浮筒式莲藕收获机
浮筒式莲藕收获机通常配备小型汽油式水泵,通过高压水流将莲藕采挖出来,随后由人工捡拾。但通常自动化程度低,水泵功率小,对于深水藕的采挖效果不理想。浮筒式莲藕收获机代表机型主要有以下3种。
2010年肖科星[13]设计研发了三种机型的浮桶鸭嘴式莲藕收获机,分别是W-FPZ-1200A、W-FPZ-1200B以及W-FPZ-1200C,W-FPZ-1200C的结构如图3所示。这三种机型的结构和原理相似,都是由浮筒、把手、水泵、汽油机以及喷嘴装置构成,喷嘴的出口形状为方形,整体通过浮筒使其悬浮于水面上,由操作人员推着把手控制挖藕机的运动,这三种机型汽油机的功率为4.8 kW,挖藕深度分别为30、40、50 cm。
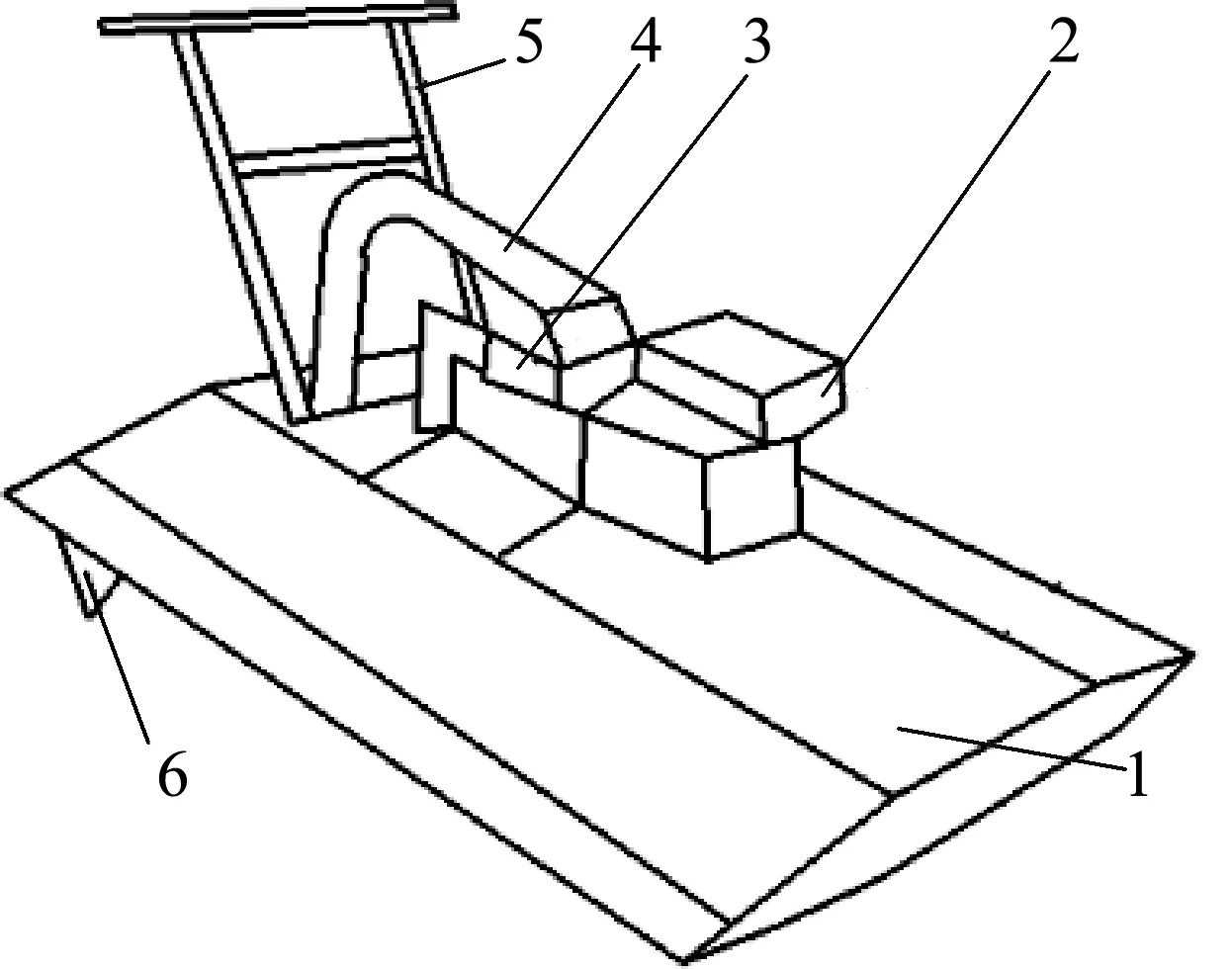
图3 W-FPZ-1200C浮桶鸭嘴式莲藕收获机
2017年刘鹏等联合开发一款浮筒式莲藕收获机,如图4所示,主要由浮筒、储水室、喷头、水泵和发动机组成。该挖藕机采用汽油式发动机为水泵等提供动力,水流经水泵形成高压水流从喷头喷出,冲刷莲藕周围的泥土,为了防止水泵吸入杂草,在浮筒内部增加了储水室,储水室的两侧设置有通孔,田中的水经过滤后进入储水室,水泵从储水室内吸水。该机械机构紧凑、成本低、工作平稳,作业效率高。
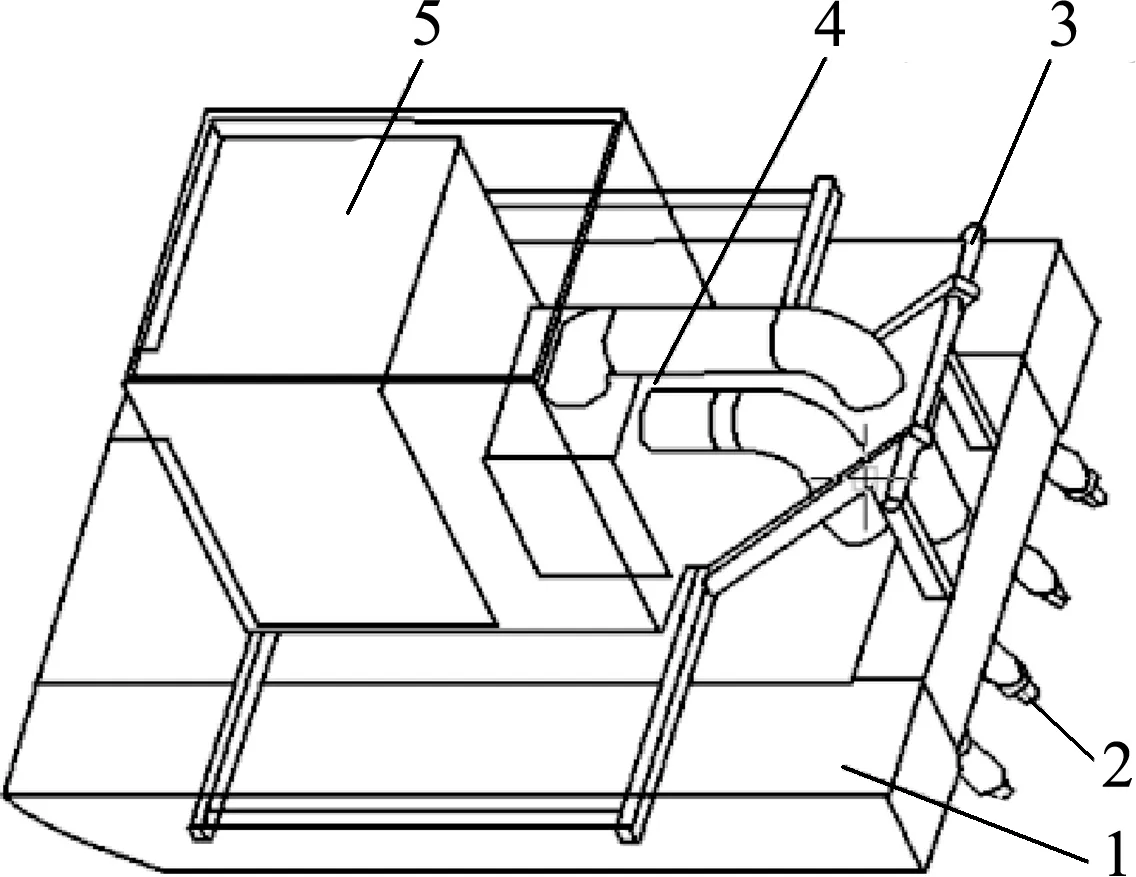
图4 浮筒式莲藕采挖机
2019年林一涛设计一种乘坐式浮筒挖藕机,如图5所示,主要包括驱动轮、浮筒、过滤装置、喷水管、喷流装置以及汽油机水泵等结构,作业时,浮筒漂浮在水面,由驾驶人员踩动驱动轮的踏板,带动驱动轮旋转,从而控制挖藕机前进,挖藕原理则是通过汽油机水泵将水吸入,通过喷流装置上的喷嘴喷出水流,冲刷莲藕周围的泥土,从而实现挖藕作业。
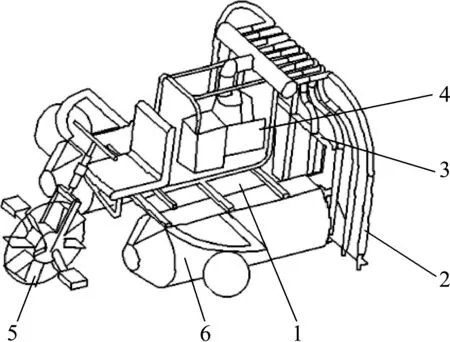
图5 乘坐式浮筒挖藕机
上述3种类型浮筒式莲藕收获机,第一种和第二种结构原理相似,都是由藕农在水田里推着挖藕机移动,从技术参数上来看,第二种挖藕效率更高,第三挖增加了驱动轮,藕农可以驾驶莲藕收获机进行行走,减少了作业强度,三种浮筒式莲藕收获机具体技术参数如表3所示。
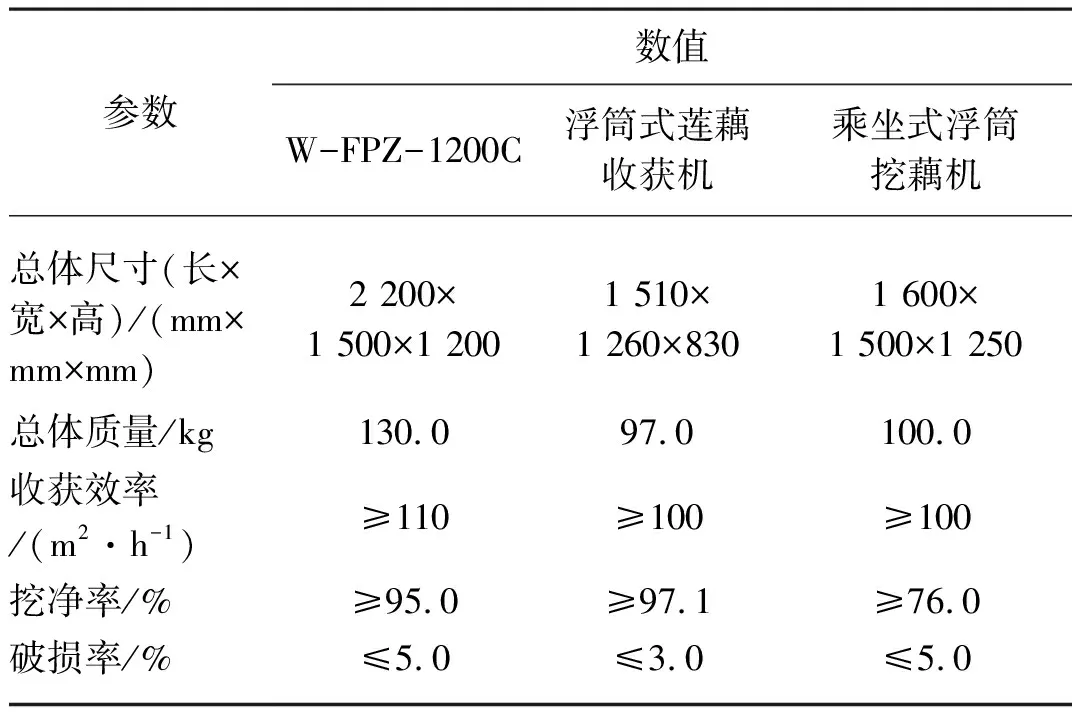
表3 三种浮筒式莲藕收获机的主要性能参数Tab. 3 Main performance parameters of three floating lotus root harvesters
2.2.3 轮式莲藕收获机
我国轮式莲藕收获机的机型相对较少,主要代表机型有以下两种。
2015年郭洋民[14]设计研制了一种轮式挖藕机,如图6所示,主要包括车架、摆动机构、水力采挖装置和液压传动装置组成,水力采挖装置主要由水泵、分水器、出水器以及喷头组成,水泵为柴油机水泵,在水泵的工作下,藕田中的水流经分水器、出水管以及喷头形成高压水流,摆动机构主要驱动喷头进行左右摆动,该挖藕机的优点是喷头可以自由摆动,增大了工作幅宽,采挖效率较高。
2018年刘向军等[15]设计了一款手扶轮式莲藕收获机,如图7所示,该挖藕机主要包括喷头、行走轮、车架、发动机、水泵以及分水器等组成,发动机通过皮带驱动行走轮行走,并且驱动水泵工作,将水流抽到分水器,从喷头流出,适合于浅水藕田,操作简单,作业效率较高。
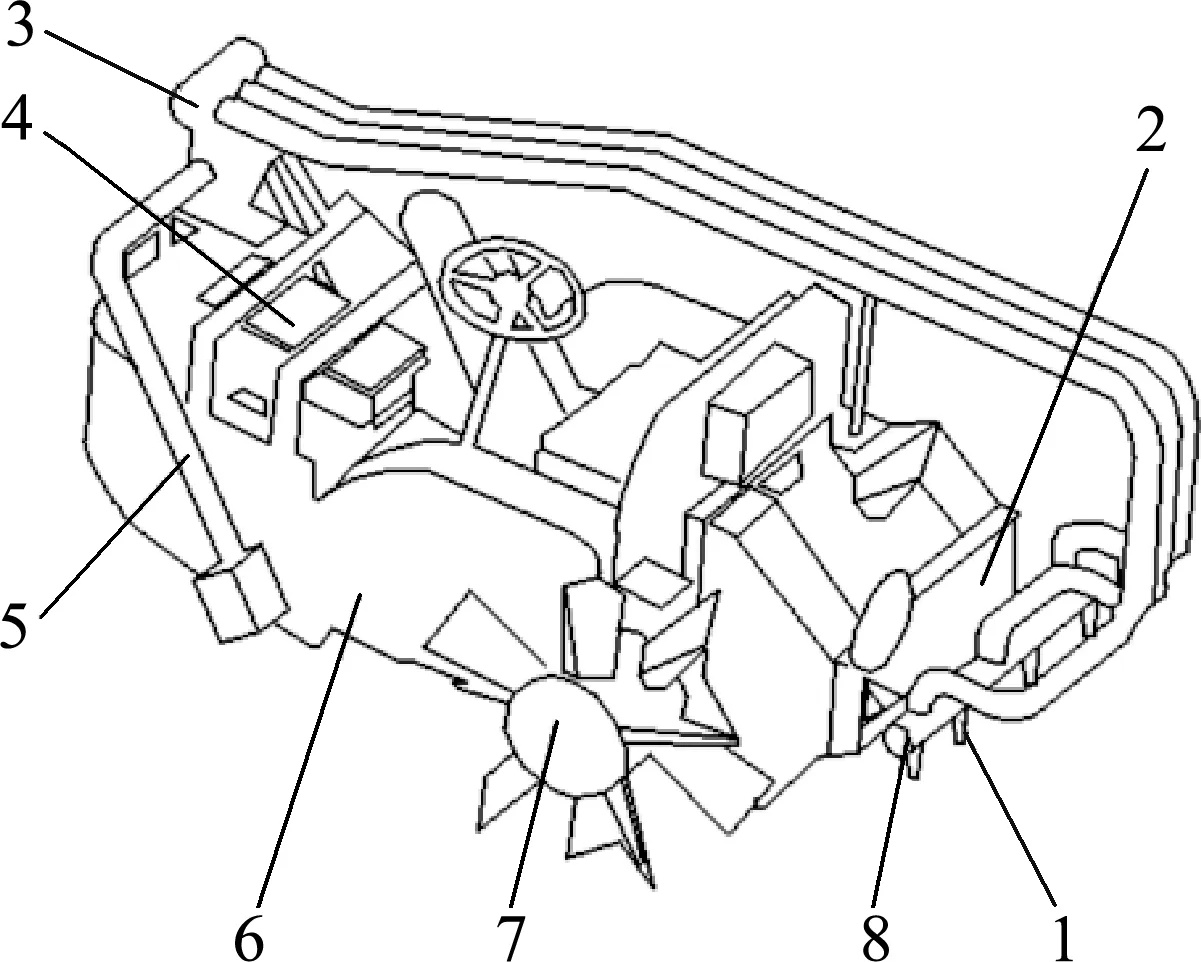
图6 轮式挖藕机
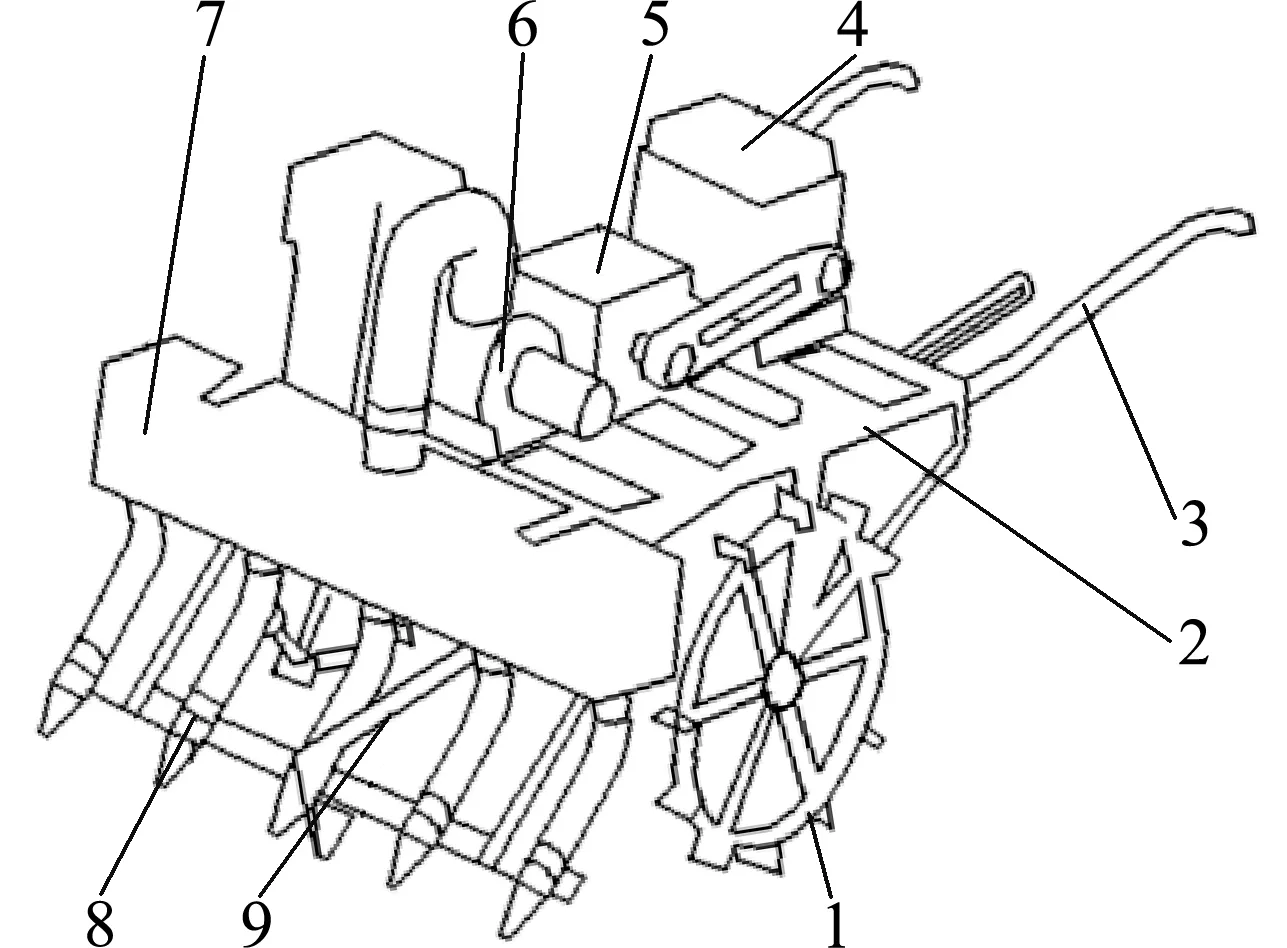
图7 手扶轮式莲藕收获机
上述两种轮式莲藕收获机,第一种有驾驶人员操作,增加了人体的重量,虽然减少了人工劳动强度,但是驱动轮更容易陷车;第二种结构简单,从性能参数看出,挖净率相对较高,破损率相对较低。两种轮式莲藕收获机具体技术参数如表4所示。
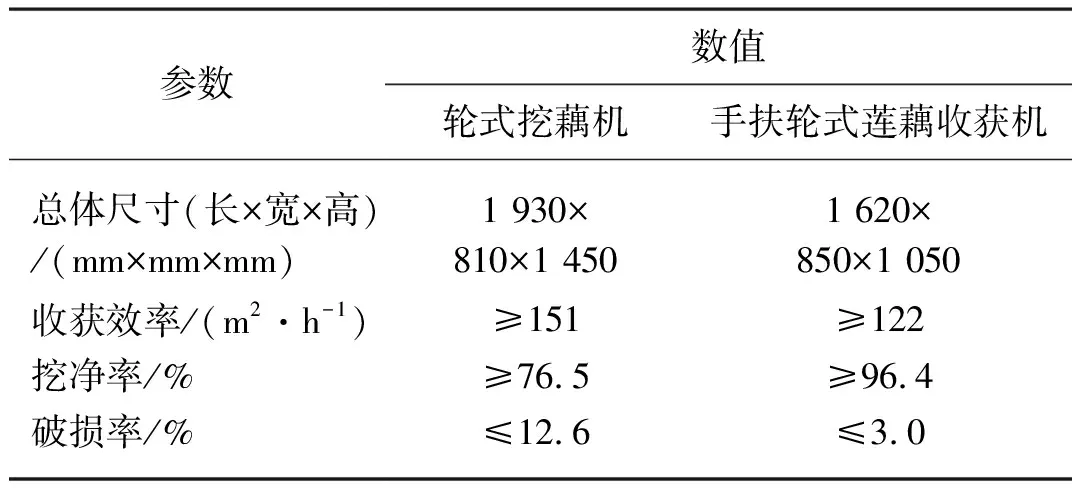
表4 两种轮式莲藕收获机的主要性能参数Tab. 4 Main performance parameters of two wheeled lotus root harvesters
2.2.4 螺旋推进式莲藕收获机
2020年,冯闯闯[16]研制出一种螺旋推进式莲藕收获机,包括底盘、柴油机、汽油机水泵以及喷头装置等构成,底盘采用螺旋推进式结构,作业时,柴油机驱动螺旋辊筒旋转,螺旋辊筒相对旋转产生轴向力驱动收获机前进,前进过程中可去除表面部分泥土,喷头设置于收获机后方,通过汽油机水泵提供高压水流,从喷头喷出,实现莲藕收获作业,该收获机挖掘深度可达42 cm,收获效率较高,但存在消耗功率较大,灵活性不好,莲藕损伤率高的问题。
3 存在问题
从以上几种不同的莲藕收获机可以看出,目前莲藕收获机几乎都采用喷流式原理,利用高压水流将莲藕周围泥土冲散,莲藕漂浮出水面,具有破损率低的优点。但现有莲藕收获机的关键技术并没有得到改善,自动化程度低,部分机型仍处于样机试制阶段,浮筒式莲藕收获机由于结构简单,体型较小,价格低廉,应用较为广泛,但是存在自动化程度低、人工劳动强度大的问题。通过分析现有的莲藕收获机,我国的莲藕收获机械化、自动化的研究与技术尚不成熟,主要原因是:第一,我国人口多,劳动力足,人工挖藕成本不高,机械化收获莲藕需求不明显;第二,我国莲藕种植不规范,且以散户种植为主,莲藕收获机械可靠性不高,难以让莲藕种植户购买,致使莲藕收获机械发展受限;第三,目前已有研究人员提出了自动化、智能化莲藕收获方案,但由于研发成本高等因素并未形成相应的产品[17]。近些年,随着莲藕产业的不断发展,我国不断提高对莲藕收获机械的重视程度,我国莲藕收获机械也逐渐发展,就目前的发展情况看,但仍存在一些问题。
1) 莲藕种植模式不统一。我国莲藕种植地区零散并广泛,以农户和莲藕产业合作社种植为主,标准化种植程度低,种植品种也参差不齐,莲藕机械通用性较差,故不利于莲藕收获机械的发展,因此,推进收获机械与莲藕农艺的融合是莲藕产业体系发展的必要趋势。
2) 大部分莲藕收获机械结构单一,自动化程度低。我国目前主要的莲藕收获机械主要利用高压水射流冲刷,将泥土中的莲藕与泥土分离,莲藕靠自身浮力漂浮水面,目前的莲藕收获机械普遍结构简单,大多数需要藕农控制莲藕收获机移动,劳动强度大,长时间在水田工作对藕农身体造成一定影响。
3) 莲藕收获机械功能单一,不能满足其需求。我国莲藕采收机的研制主要偏向于如何采集莲藕,将莲藕挖出后使其漂浮在水面,却依旧需要人下水进行收集,而对采集和收装一体机的研制目前几乎处于空白阶段。
4 发展趋势
近年来,通过国内企业和科研单位的不断努力,我国莲藕收获机械得到了快速发展,一系列性能较好的机型备推广使用,未来我国莲藕收获机械发展重点应放在以下几个方面。
1) 规范莲藕区域标准化种植模式,制定莲藕收获机的标准要求。我国莲藕种植面积广且品种差异显著,从农机与农艺结合角度考虑,整合各区域小面积、多品种莲藕的种植模式,统一当地种植模式以及莲藕品种,制定莲藕收获机的标准要求,有针对性地进行莲藕收获技术的研发和推广应用。
2) 加大对莲藕收获机械关键技术的研究。水田中收获机械要具有自由移动能力,能够实现前后左右灵活移动作业能力;喷射式可调节摆动装置要具有上下前后的高度和左右摆动的功能,保证对莲藕周围的泥土进行全面冲散,使其莲藕通过自身的浮力漂浮于水面,收获机应拥有收集传送装置,使莲藕漂浮与水面后可以通过传送装置进行统一收集。
3) 实现莲藕收获机械集成化、智能化。利用传感器技术、机械视觉技术、自助导航系统等技术提高莲藕收获机械的智能化水平,实现自动导航行走,精确定位莲藕,采挖莲藕以及自动收集作业,一方面有效降低了人工劳动强度,提高了收获效率;另一方面降低莲藕损伤率,提高收获率。
5 结语
近年来,由于我国农村经济结构的改革深入发展,莲藕种植面积迅速上升使得我国的莲藕产业迅速发展,亟需有适用于我国各地区的莲藕收获机械推广开来。虽然已有研发人员和研发单位对莲藕收获装备进行了研究和生产,基本功能已经实现,但相关技术还不够成熟,现有的莲藕收获机械还存在功能单一,自动化程度低等问题。我国拥有广阔的土地和湖泊,莲藕种植地面积也将不断扩大,我国莲藕机械的发展,是影响莲藕产业发展的关键因素之一,面向我国农业产业结构调整日益加快的积极态势,促进我国莲藕生产资源的开发与利用势在必行。鉴于国内外莲藕收获机械技术发展滞后,其适用装备不能满足其需求,研究开发适合我国国情的先进适用技术及莲藕收获装备不仅具有重要的战略意义,而且具有重要的现实价值。
