爬壁机器人发展与关键技术综述
2022-09-21聂佩晗张雅婷陈勇
聂佩晗,张雅婷,陈勇
(南京林业大学机械电子工程学院,江苏南京 210037)
0 前言
随着科学技术的发展,现代社会越来越追求智能化,工业机器人可以把人类从繁琐、重复、危险的劳动作业中解放出来。其中,爬壁机器人具有自动化程度高、能够代替人完成特殊场合下作业的特点,因此近些年成为国内外学者的研究热点。爬壁机器人是一种工作在空间壁面环境中并携带特定作业工具以完成特定任务的特种机器人。它可以代替人类在高空等危险环境下有效完成各项工作,如船舶业的除锈与喷涂、大型建筑物外表面的清洗、反恐侦察、石化行业大型油罐的喷漆及检测探伤、金属罐容量计量、大型风电扇叶的维护等。在实际应用中,爬壁机器人不仅需要在简单的壁面进行工作,还需要工作于复杂的壁面环境,如曲面、多壁面、粗糙平面等。然而目前,爬壁机器人行业尚未成熟,研究机构主要以科研院所及高校为主,存在功能性匹配度不高、安全稳定性低等制约因素。要尽快突破这些瓶颈,对爬壁机器人关键技术的研究及创新必不可少。
1 爬壁机器人的吸附方式
根据工作环境和工作介质的不同,爬壁机器人吸附方式主要有:负压吸附、磁吸附、仿生吸附、静电吸附、黏结剂吸附。
1.1 负压吸附
负压吸附的原理是在机器人内部产生真空或者负压,利用机器人内外压力差实现吸附。负压吸附通常为吸盘结构,它的优点是不受工作材料的限制。
图1所示为华南理工大学研发的一种多关节双足爬壁机器人W-Climbot,它每只足有3个真空吸盘以增加冗余度,提高吸附的可靠性。该机器人由5个关节模块和2个负压吸附模块组成,在光滑表面上的移动性能优良,也可具有吸附和操控物体的功能。
图2所示为日本东北大学发明的一种基于新型真空吸盘的爬壁机器人,其吸盘有可随接触表面变形的裙部以避免漏气。这种多吸盘脚式爬壁机器人具有可靠的稳定性和吸附性,但其移动是间断的,且移动速度受到限制,控制难度大。

图 1 W-Climbot机器人 图2 真空吸盘式爬壁机器人
负压吸附方式虽然可以不受壁面材料的限制,但对壁面的粗糙程度要求较高,只能用于连续光滑的壁面。若壁面上凹凸不平或者有裂缝,会削弱吸盘的吸附能力,对爬壁机器人正常作业造成影响。
1.2 磁吸附
磁吸附又分为电磁吸附和永磁吸附。这种吸附方式能产生很大的吸附力,不受凹凸或裂缝的限制,也不受物体表面状态(粗糙度、湿度、温度)的影响。
西班牙的GRIECO等研制出了一种具有大负载能力的六足电磁吸附式机器人REST,如图3所示。西班牙CSIC大学工业自动化研究所研制出2种足式电磁吸附爬壁机器人,采用直流电机和齿轮驱动。电磁吸附可以通过对电源的控制实现吸附力大小的调节,但同时也存在断电时机构容易发生坠落的风险。

图3 全地形六足爬壁机器人 图4 永磁吸附履带模块
如图4所示,上海交通大学采用稀土永磁吸盘作为壁面吸附机构,研制了一种应用于油罐容积检测的爬壁机器人,该机器人设有2个旋转和1个直线运动关节,能越过15 mm高的障碍。清华大学利用永磁吸附装置研制出非接触式吸盘,设计了多体柔性永磁吸附爬壁机器人,能在复杂空间曲面上可靠吸附和灵活运动。永磁吸附具有结构小、吸附力大以及不需要提供额外电源的优点,但永磁吸附的磁力大小不能调节,吸附力有时会成为爬壁机器人运动的阻力。
磁吸附方式只能应用于导磁体表面,如果壁面上出现锈蚀或者有螺丝松动,爬壁机器人在移动过程中可能会吸走铁锈或者螺丝,导致磁铁吸力下降,也会给被检测设备带来安全隐患。
1.3 仿生吸附
科学家受到自然界某些动物(如蚂蚁、壁虎等)能在三维空间壁面上自由行走的启发,参照其骨骼和运动机制以及足端的爪刺结构,研制出基于仿生技术的爬壁机器人。其吸附原理是利用纳米级人造仿生纤毛材料通过范德华力吸附于壁面。
如图5所示,美国斯坦福大学一个研究小组开发出了一种仿壁虎机器人Stickybot, 它的4个趾底布满了数百万根人造橡胶制成的用于粘附的毛发,能轻松地实现脚足与附着面的吸附与脱附。该机器人的外形、运动方式、吸附原理都与真实的壁虎非常相似,但吸附能力比真实壁虎差很多,而且加工不易却容易损耗。

图5 Stickybot 图6 仿生爪刺式履带爬壁机器人
在国内,南京航空航天大学仿生研究所开发了一种四足仿壁虎爬壁机器人,这种机器人每条腿有6个自由度,足端采用一种仿壁虎的黏附阵列。图6所示为西安理工大学提出的一种仿生爪刺式履带爬壁机器人,通过机构设计模仿昆虫足部粘附、脱附动作,实现在履带旋转过程中爪刺足稳定粘附、轻松脱附,为设计高效运动的仿生爪刺式爬壁机器人提供了思路。
上述仿生吸附的方式可在粗糙壁面利用毛刺(爪刺)吸附,其应用前景十分广阔。但是,这种吸附方式的吸附力有限,对壁面的要求也很高,其足部纳米级结构的人工纤毛韧性和强度不足且制作成本较高,距离实际应用还有很大差距。
1.4 静电吸附
爬壁机器人可以通过静电吸附的方式吸附在竖直壁面或者天花板上。这种方式主要利用静电吸盘与壁面之间的电场力作为机器人的吸附力,可作用于各种壁面材料,具有质量轻、功耗低、噪声小、结构简单、对壁面无损伤、吸附力可控等优点。
日本东京大学YAMAMOTO等最先尝试将静电吸附技术应用于爬壁机器人,采用柔性电路板制作了两款爬壁机器人样机,如图7所示。采用双电极静电吸盘,通过尺蠖方式在垂直导体壁面上行走,II型样机中将双电极结构改进成了梳妆叉指电极结构,以实现在绝缘壁面上行走。

图7 东京大学设计的爬壁机器人
哈尔滨工程大学采用铝箔作为电极,研发了国内首款单履带结构的静电吸附式爬壁机器人,通过在电极上施加高压使机器人能够在石灰壁面上进行移动。北京航空航天大学研制的静电吸附爬壁机器人,可在倾角为30°的壁面上实现转弯。华南理工大学的王黎明研制出双履带的静电爬壁机器人(见图8),该样机两侧履带均由静电吸附膜构成,通过调控左右电极速度,使两侧履带形成速度差,实现爬壁机器人的直线行走、转向掉头等运动。

图 8 双履带的静电爬壁机器人
静电吸附机器人中使用的柔性电极吸附膜与电机带动的辗轴之间是通过摩擦力带动的,故而电极膜容易被磨损,导致吸附性降低。此外,静电吸附机器人不适用于潮湿工作环境中。
1.5 黏结剂吸附
黏结剂吸附方式通常采用黏性材料,利用分子间的范德华力,在很小的接触面上产生巨大的吸力且不受壁面材料和粗糙程度的影响。
美国卡内基·梅隆大学研制了一种采用扁平黏合弹性材料的小型机器人Waalbot,它的每个脚上呈三角分布着3个黏性足盘,由电机驱动实现爬升和转向。韩国蔚山国立科学技术研究所展示了一种壁虎式四足机器人,如图9所示,它的4个足带有聚二甲基硅氧烷黏合垫蘑菇形微柱,可以在天花板和不同角度的墙壁上行走。

图9 壁虎式四足机器人 图10 Mini-Whegs机器人
美国克利夫兰大学设计了采用专利技术的爬壁机器人Mini-Whegs,如图10所示,它的每个轮子上均装有4个具有特殊黏性的高分子材料制成的长条片状结构。同轴上2个轮子的叶片与接触面成一定角度并相互交错,以此来保证在行进时至少有1个轮子的叶片与壁面相接触。
黏结剂吸附方式常与仿生吸附相结合,采用这种吸附方式,虽然不受工作壁面的限制,但黏性材料很容易受到环境中灰尘的影响, 使得吸附力下降。
1.6 吸附方式总结
综上所述,不论是哪种吸附方式,在为爬壁机器人提供吸附力以保证其安全移动的过程中,吸附力总会成为爬壁机器人移动的阻力,如何平衡吸附性与机动性成为关键问题。南京林业大学研制了一种采用新型电磁吸附结构的爬壁机器人,如图11所示。这种电磁结构能让分别与电磁铁正负极相连的小滑轮沿着只有下侧部采用导电材料制成的两条环形导电槽移动,当同步带轮被驱动旋转时,电磁铁将依次与导电槽接触和脱离。在这种方案中,磁力只是吸附力而不会成为机器人运动过程中的阻力。经实验验证,这种方案具有可行性。

图11 电磁吸附爬壁机器人
2 爬壁机器人的行走方式
爬壁机器人常见的行走方式有多足式、轮式、框架式和履带式等,其中轮式和履带式最为常见。以上行走方式各具优缺点。
如图9所示的四足式爬壁机器人,能够实现在粗糙壁面上稳定爬行,具有一定的越障能力。这种多足步行式爬壁机器人常采用仿生吸附的方式,转向灵活、壁面过渡性好,但移动速度慢且控制难度大。
中国计量大学研制的一种轮式爬壁机器人如图12所示,具有运动灵活、耗能少、体积小、质量轻、移动速度快等优势。但轮式爬壁机器人车轮与壁面的接触面积小,容易打滑,虽然可以通过增加辅助机构以提高其吸附能力,但会引起自重的增加,因此轮式爬壁机器人的负载性能不好。

图12 可折叠轮式爬壁机器人 图13 框架式爬壁机器人
框架结构是一种比较平稳的结构,图13所示为北京理工大学设计的框架式爬壁机器人,该机器人利用两层或者多层框架交替运动来实现机器人本体的前进,控制简单、吸附能力较强,但其移动速度慢且不易转向。
以图8所示的双履带式爬壁机器人为例,这种爬壁机器人与壁面接触面积大、自身吸附力较强、可供负载大,但在转向时需要较大的转矩,壁面过渡能力也较弱。
在爬壁机器人研究中,常选择多种行走方式相结合的方法来实现壁面过渡。上海交通大学研制的轮足组合式自主焊接爬壁机器人WCWR,综合了轮式和足式的优点,性能得到了较大提高。
3 爬壁机器人的驱动方式
驱动方式决定了机器人的运动状态。常见的驱动方式有气压驱动、液压驱动和电机驱动,原理是将气压、液压或者电机等的能量转化为机器人直线或者旋转运动所需能量。
3.1 气压驱动
气压驱动是采用气动马达或者气缸压缩气体实现能量传输,在工业上应用很广。其优点在于原理简单、便于操作、易于编程,以空气作为工作介质取之不尽用之不竭,制造成本低、输入力大且具有良好的缓冲作用。图14所示的气压驱动爬壁机器人,气缸用于将压缩空气的压力能转换为机械能以驱动机器人运动。其缺点在于需要配置空气压缩机,噪声较大,且具有强烈的非线性,控制困难。

图14 气动六足式爬壁机器人
3.2 液压驱动
液压驱动以液压油作为工作介质,把油压泵产生的压力转换为机器人运动过程中所需要的扭矩和力,通过液压油缸或液压马达来控制执行机构的运动,稳定性较强。它具有动力大、力矩与体积之比大、响应速度高等优点。图15所示为液压驱动重载爬壁机器人的液压系统,以液压系统控制动力驱动单元的液压马达减速装置,为重载爬壁吸附机构提供行走的驱动力,同时控制液压马达减速装置形成差速工况,实现整套重载爬壁吸附机构的转向行走。液压驱动需要设计体积较大的液压动力源设备和复杂的管路,工作效率较低、维修技术要求高、系统噪声大,还存在油液泄漏的危险,在一定程度上影响机器人的稳定性和控制精度。因此,液压驱动常用在大型动力机械上。

图15 爬壁机器人液压系统
3.3 电机驱动
电机驱动基本原理一般是通过电机和减速器之间的配合来驱动负载,可以分为普通电机驱动、直流电机驱动和步进电机驱动。电机驱动具有效率高、响应快、体积小、质量小等优点,但在提供大推力时成本较高,且经常需要配合减速器使用,降低速度需要很大的力矩,力矩与质量之比较低,这是电机驱动的一大弊端。图16所示电机驱动式爬壁机器人启动时,伺服电动机直驱主动轮,电动机输出的牵引力需要克服静摩擦力与重力沿船体的分量,从而完成行进动作。目前,电机发展趋势为小型化、大功率,扩展了电机驱动的应用范围和场合。

图16 电机驱动式爬壁机器人
4 爬壁机器人的壁面过渡结构
爬壁机器人不仅需要在单一壁面上工作,而且会在阶梯壁面、存在一定角度的壁面或者复杂曲面环境中工作,这就要求爬壁机器人具有在三维空间壁面过渡的能力。然而,这个问题始终没有得到很好的解决,这在很大程度上制约了爬壁机器人进一步的发展和应用。
4.1 多段式结构
国内外的学者们大多数采用双段式或多段式结构来解决爬壁机器人的壁面过渡问题。韩国首尔国立大学采用柔性连接的自适应运动研制了爬壁机器人Combot。美国斯坦福大学基于拉格朗日公式研制了一种磁履带式多体爬壁机器人,如图17所示,它可实现在垂直壁面间的过渡。
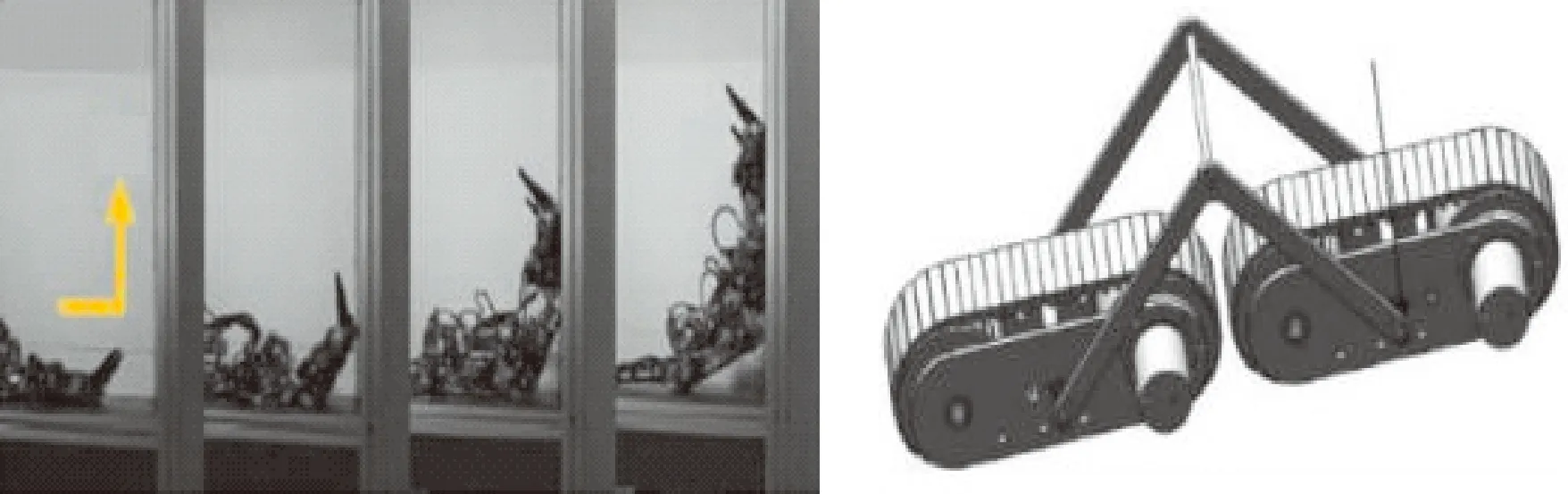
图17 磁履带式多体爬壁机器人 图18 双履带过渡结构
中国计量大学研制了利用扭簧连接的永磁吸附的可折叠轮式爬壁机器人和双履带过渡结构式爬壁机器人,分别如图12和图18所示。
4.2 连杆结构
哈尔滨工业大学采用三自由度机械臂吸盘和四轮滑动吸附机构相结合的方案,研制了轮足混合双吸盘爬壁机器人,如图19所示。轮式移动方式下,吸盘为滑动吸附状态,机器人能够在平整壁面上快速移动;双足运动方式下,吸盘为静止吸附状态,可实现机器人的地壁过渡、越障等运动。南京理工大学采用复合连杆机构加丝杆驱动来实现爬壁机器人在各种墙面障碍上的尺蠖式仿生式移动。

图19 轮足混合双吸盘 图20 连杆式爬壁机器人
韩国首尔国立大学采用多连杆轨道机构和气动黏合技术,解决壁面过渡问题。印度拉姆斯瓦密纪念大学研究了一个连杆式爬壁机器人,将3个吸盘呈三角形放置在连杆两端,其结构如图20所示。
4.3 其他结构
除上述结构,学者们还在其他结构上针对壁面过渡问题进行了一些研究。
瑞士联邦理工学院洛桑分校采用钝角三角形结构和磁吸附履带结构相结合的方案研制了爬壁机器人TRIPILLAR,如图21所示。在内侧墙角时,驱动轮通过履带将动力传递至辅助轮,辅助轮与壁面间的摩擦力对机器人产生的反转力矩将机器人的本体抬起,以达到壁面过渡的目的。

图21 TRIPILLAR 图22 行星轮系结构机器人
中国科学院沈阳自动化研究所针对具有双足轮混合动力运动机构的具有壁面过渡能力的爬壁机器人的步态规划问题,提出了一种采用插值方案和BP神经网络的在线自适应算法。北京信息大学设计了一种可以实现内直角壁面过渡的混合磁吸附爬壁机器人模型。中国科学院大学研制了一种由一个行星轮系结构将负压模块和真空模块结合在一起的轮足复合式爬壁机器人,如图22所示,2种运动方式相互配合,利用复合运动模式可实现交叉面跨越等。
现有的这些关于壁面过渡的研究,大多数还停留在模型仿真阶段或实验室研究阶段。在少数有实物的成果中,大部分只具有单一的过渡能力,即只能进行壁面凹过渡或壁面凸过渡,并不能满足在复杂壁面上移动。南京林业大学研制了一个带有偏转离合机构的两段式磁吸附爬壁机器人,如图23所示,它具有行走转向和壁面的凹过渡和凸过渡功能。前后两车段间连接有能维持一定偏转角度以完成爬壁机器人在不同夹角壁面上过渡行走的定位机构。其行走转向和换壁动作主要是依靠伺服电机和4个小型步进电机驱动花键齿轮与内齿轮的啮合与离开的相互协调完成。

图23 两段式爬壁机器人结构示意
5 结束语
不同爬壁机器人的吸附方式、行走方式、驱动方式和壁面过渡方式具有不同的优缺点,不同爬壁机器人往往适用于不同的场合。其中,吸附方式爬壁机器人主要的技术瓶颈是吸附性和机动性的统一问题。吸附力越大,工作中的安全性越高,但同时受到的阻力也越大。由于无缆化是爬壁机器人的一个发展方向,应多采用电池供电。在同等的供电条件下,阻力会导致爬壁机器人的损耗增加,续航能力下降。另外,实际应用中还需要爬壁机器人工作于复杂壁面环境,所以它还必须具有在不同工作壁面之间进行壁面过渡的能力。然而,目前对爬壁机器人的研究尚未成熟,现有的技术并不能满足实际的需求。综上所述,如何更好地解决吸附性和机动性之间的矛盾以及如何提高爬壁机器人的壁面过渡能力,是研究爬壁机器人的关键问题。
