智慧农业背景下高原夏菜虫害识别与施药算法研究*
2022-09-20苏军德高立兵
刁 鹏 , 苏军德 , 高立兵
(甘肃有色冶金职业技术学院,甘肃 金昌 737100)
0 引言
近年来,随着金昌市委、市政府相关政策支持力度的不断加大,金昌市草食畜牧业飞速发展。高原夏菜作为产业链中的重要一环,种植面积逐年扩大。2022年,永昌县预计全年高原夏菜种植面积23万亩以上,产量69万t。
据调查,危害高原夏菜的虫害多达21种[1],每年因虫害造成的高原夏菜产量损失15%~20%。如何快速、高效地对高原夏菜的虫害进行监测识别并精准施药,对提升高原夏菜的产量有着极其重要的意义。传统的方法主要依靠植保人员目视解译出虫害信息,再采用喷药机器喷洒农药。这种方式不仅效率低,容易造成浪费,还会污染环境。喷药机器人能精准施药,节省人力、物力,提高植保效率,可以实现经济效益、社会效益、生态效益的统一[2]。
20世纪70年代末,植保机器人逐渐被欧美等发达国家所应用,出现了喷药、采摘机器人。但是,初期的机器人算法落后,性能低,误差率大。随着计算机技术、图像识别技术的发展,机器人的智能化程度大幅提升,逐渐具备了自动监测虫害、自动施药等功能[3-4]。赵春江等[5]提出的基于蝗虫生境因子叠置分析的处方图生成技术,实现了基于时间序列动态描述区域虫灾蔓延范围和成灾程度,为精准施药提供了依据。邵庆等[6]采用迭代阈值分割和微分边缘检测提取小麦病斑部位的形状特征,为农作物病害诊断提供了参考。刁智华等[7]提出了一种在复杂条件下分割棉花害螨病斑图像的方法,可以有效识别棉花害螨病斑,准确率高达97.83%。王献锋等[8-9]提出了一种基于病害叶片图像和环境信息的黄瓜等病害识别方法,可以有效识别3种叶部病害,识别率在90%以上。刘雪美等[10-11]设计了喷杆喷雾精确对靶施药系统,可以精确对靶施药,节省药液20%以上。目前,相关研究多侧重对单一虫害的识别,对多种虫害进行监测的研究较少,相关的精准施药方案也较少。本研究以高原夏菜常见虫害为研究对象,基于图片信息提取了蔬菜的虫害信息,以此进行多种虫害的识别。并以虫害种类、受害程度为依据,实现对高原夏菜的精准施药。
1 材料与方法
1.1 系统原理
机器人系统主要由3部分组成:图像采集部分、信息提取部分、施药控制部分。图像采集是借助安装在机器臂上的相机对蔬菜进行拍摄。信息提取部分是指对采集到的图片进行自动处理,包括滤波降噪、超绿灰度化、特征提取、信息比对等。可从图像上叶片的虫斑纹理、颜色、形状等判别虫害,从虫斑面积大小判断虫害严重程度。施药控制部分是指根据获取的信息,调节药物的剂量、控制机器人的施药速度,以达到精准施药的目的[12]。
1.2 试验设计
高原夏菜种植密集,一般各行作物间距相等,幼苗期间距大,叶片较小,没有相互遮挡,虫害发生也较少。随着作物生长,作物间距变小,此时叶片遮挡程度也相对低,虫害逐渐发生,但种类单一,易于发现。生长末期各行作物几乎没有间距,叶片遮挡程度高,虫害密集发生且种类多,不易区分。鉴于此,课题组选择高原夏菜生长中期为研究对象并进行试验。本研究在甘肃永昌县境内的600亩高原夏菜试验田内进行,利用试验田现有的植保机器人,结合研究内容将机器人改装并进行试验作业。
2 系统设计
2.1 图像采集与预处理
精准施药的关键在于虫害信息的获取是否精确。蔬菜发生虫害后,其植株会发生变化,如叶片卷曲变色、叶面出现裂纹等。受害程度不同,其表现出的特征也有很大差异,算法将根据这些特点来进行虫害识别。在机器人上安装AFT-902HC工业摄像机,分辨率为752×582,该摄像机具体参数如表1所示。设置间隔2 s采集一张图像并输出,重复采集一次用于精度检验,近景图像用于观察纹理、颜色,远景用于区分作物行。
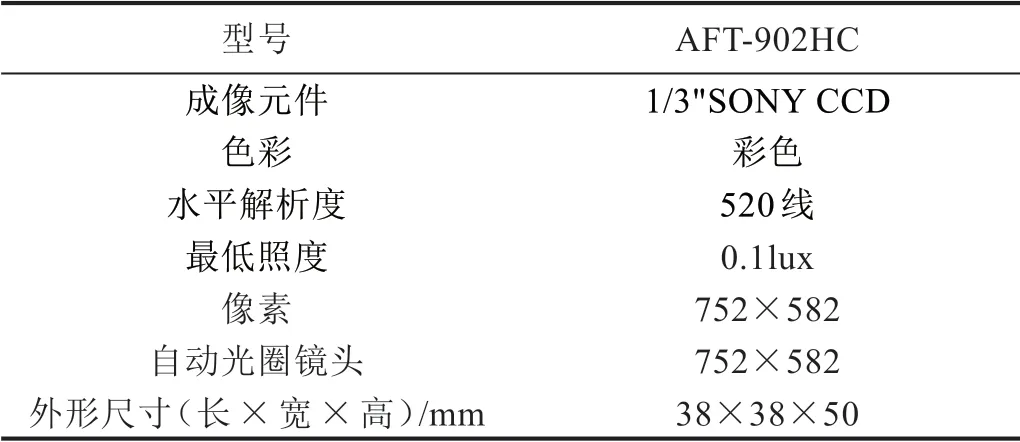
表1 AFT-902HC工业摄像机具体参数
工作时的具体路线图如图1所示。
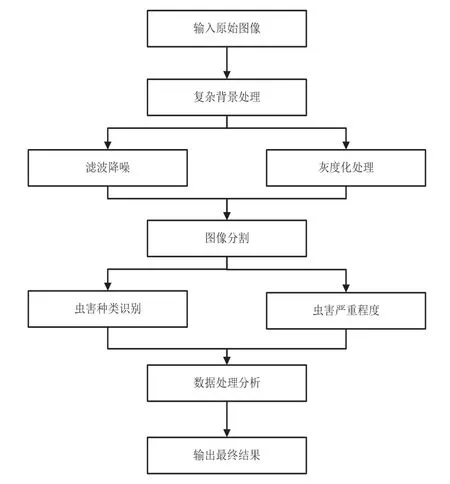
图1 高原夏菜虫害程度与识别研究总体技术路线图
2.1.1 灰度变换
采集过程易受光照、温度、湿度等因素影响,所以,要对采集到的图像进行处理,包括滤波降噪、灰度化等。
由于受虫害影响,健康叶片的图像与患病叶片的图像会产生色彩上的差异,即健康叶片及阴影呈现绿色,患病叶片呈现黄白色、黑灰色。故可以使用超绿算法针对这一特性进行特征提取,即:

图像经超绿灰度化处理后,其作物行区分更加明显,生长特征更明显。处理后的图像剔除了其他背景信息,所以更容易区分出患病叶片的患病位置、纹理、面积等,处理结果如图2所示。普通灰度化效果如图2(a)与图2(c)所示,超绿灰度化效果如图2(b)与图2(d)所示。
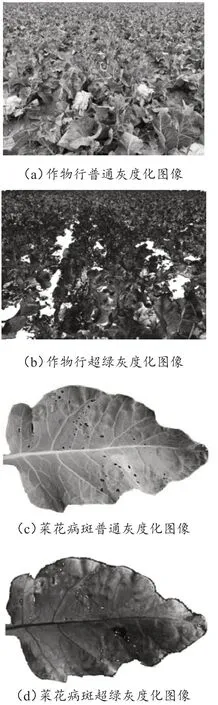
图2 灰度转换图像
2.1.2 滤波降噪
将图像进行3×3的分割,分成9个大小相同的块斑并用阿拉伯字母按顺序编号。选取模板中心点的灰度值作为处理值,这样可以降低噪声对虫斑的影响,同时也可以提高作物行的提取精度。
2.2 图像分割
将图像预处理后,要想更准确地识别虫害还需进行图像分割。图像分割的好坏将直接影响识别的精度[13],所以分割图像的方法十分重要。
从图像上看,健康叶片与受虫害叶片在色彩上有很大的差异,因此可以采用阈值分割法解决问题。为了减少不必要的参数,提高数据处理效率[14],研究采用最大类间方差比阈值作为参数进行分割,具体过程如下。
1)先解译出像素最密集区的灰度值K,接着解算出K值之前的像素数N、图片中全部像素的灰度平均值u以及它们的概率p0,p1,p2…pk:

式中,f(i,j)指图像上随机点i和j的灰度值。
2)设置起始阈值T=T0(T0>0),将图像分为两类,分别用C1和C2表示。
3)求解灰度平均值u1、u2,方差δ21、δ22:

4)计算P1,P2:

5)分别计算类内方差δ2m和类间方差δ2b:

设T=δ2b/δ2m,重复上述步骤二至步骤五,二次求解时,取T0=1/2(u1+u2),当T取最大值时,阈值最佳。本研究的阈值取200时识别效果最好。
根据测定分割后的叶片受虫害面积占总叶片面积的百分比,将虫害严重程度划分为4个等级,等级分类表如表2所示。
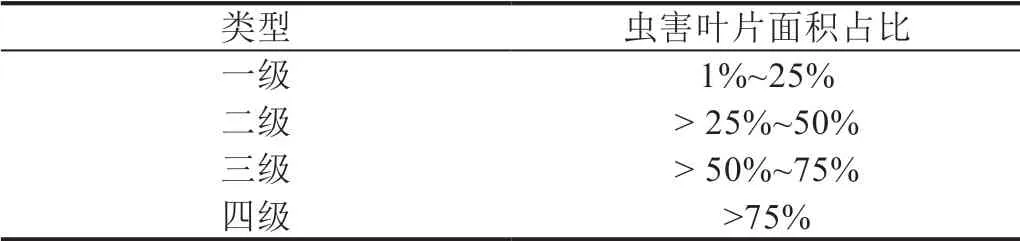
表2 虫害程度等级分类表
2.3 虫害种类识别
高原夏菜虫害的识别主要依靠3个指标:受害叶片的颜色、纹理及形状。可先根据叶片的颜色识别出一部分虫害,再用叶片的形状和纹理作为辅助,提升识别准确率。本研究选取了小菜蛾、菜青虫、桃蚜、黄曲条跳甲等4种虫害,每种选择20组样本,共80组。将80组样本通过图像进行目视解译和实地调查,将两种识别结果进行统计分析。通过绘制颜色矩阵、构建纹理的二阶矩阵(ASM),对照参数(CON)和叶片形状的不变矩阵(μ, p)[13],判别几种常见的高原夏菜虫害,判别结果如表3所示。经过特征提取、图像分割后的虫害图像容易被判别,正确率在90%以上。但由于虫害种类较多以及光照、遮挡等因素的影响,结果也有一定的误差。
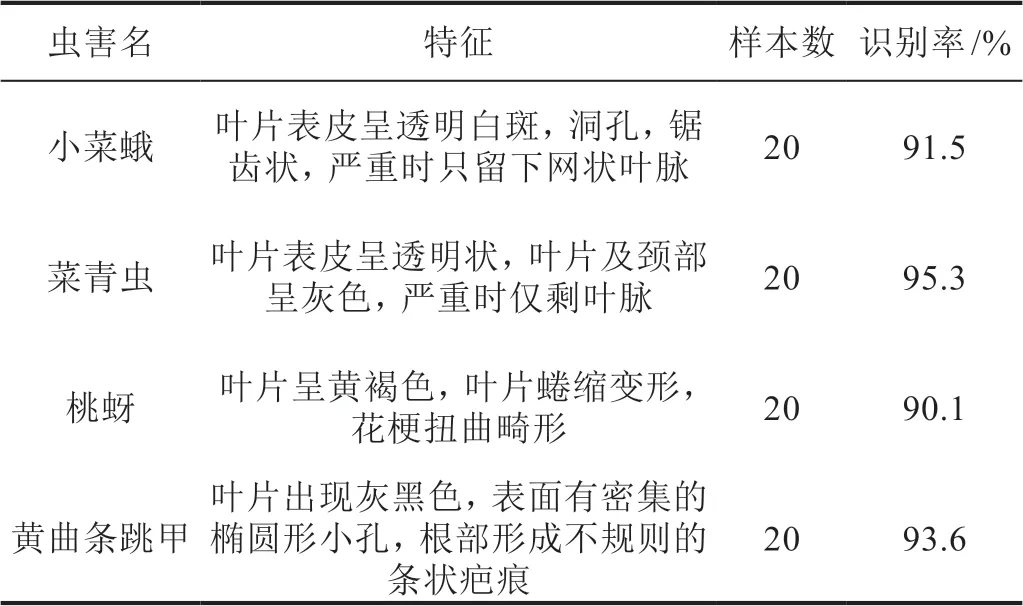
表3 高原夏菜常见虫害特征及识别
2.4 作物行识别
高原夏菜生长中期,会出现叶片遮挡、杂草生长的情况,使得蔬菜行间信息复杂。机器人的行进过程将会受到干扰,所以需要对图像进行二值化处理,使蔬菜行间距明显,便于机器人识别。二值化可以将复杂的作物行信息简化,提高图像处理速度。此外,将二值化后的作物行再进行剔除,只保留两个主行,进行Hough 变换后可以直接检测出作物行中心线[15]。
2.4.1 二值化
采用行间距相等的方式种植高原夏菜,既便于管理,也使得人工喷洒农药更方便。机器人在承担喷药任务时,首先要能准确识别作物行信息。为达到这一目的,需要对图像进行二值化处理。本研究先将图像膨胀成3×3矩阵,再利用5×1矩阵法腐蚀图像,以达到消除噪声的目的。图像二值化后的效果如图3(a)所示。
2.4.2 提取作物行
高原夏菜图像经过二值化处理后,已呈现出大致轮廓。要想更清楚地显示,还需提取作物行的骨架信息。对图像进行再处理,提取出作物行的中心轴线,这样就可以突出其特点。图像细化后如图3(b)所示。由于作物是等行距播种的,所以可以先处理2行,其余部分按等距排列对准就可以实现,图3(c)为作物2行主干图。
2.4.3 改进的Hough
直线检测通常采用Hough变换,但是常用的变换方式耗时长、运算量大,容易出错。所以本研究对传统方法进行了改进,新方法能够克服传统方式存在的缺陷。
Hough变换的中心思想是将直线问题转化为点的问题来处理,提升效率的关键在于减少参与计算的点和减小运算空间。本研究结合两种方法的特点,形成改进的Hough变换。为了减小计算量,研究中出现的直线统一采用极坐标来表示,即:

式中,ρ为距离,θ为直线与x轴夹角。运算时先将图像划分区域,然后将图像细化处理,从中随机找出两点(xm, ym),(xn, yn),将这两点组成一条直线,如式(9)和式(10)所示。

将直线点化后得到的所有点构成集合A,随机在其中选择两点求出斜率,如果斜率不满足要求就重新选点计算。为了提升效率,可以设置角度范围[30°, 150°]。根据来计算的ρ值,其中根据上述公式计算,找出所有直线,确定所需要的作物骨架行直线。使用Hough变换后的作物行的图像效果如图3(d)所示。
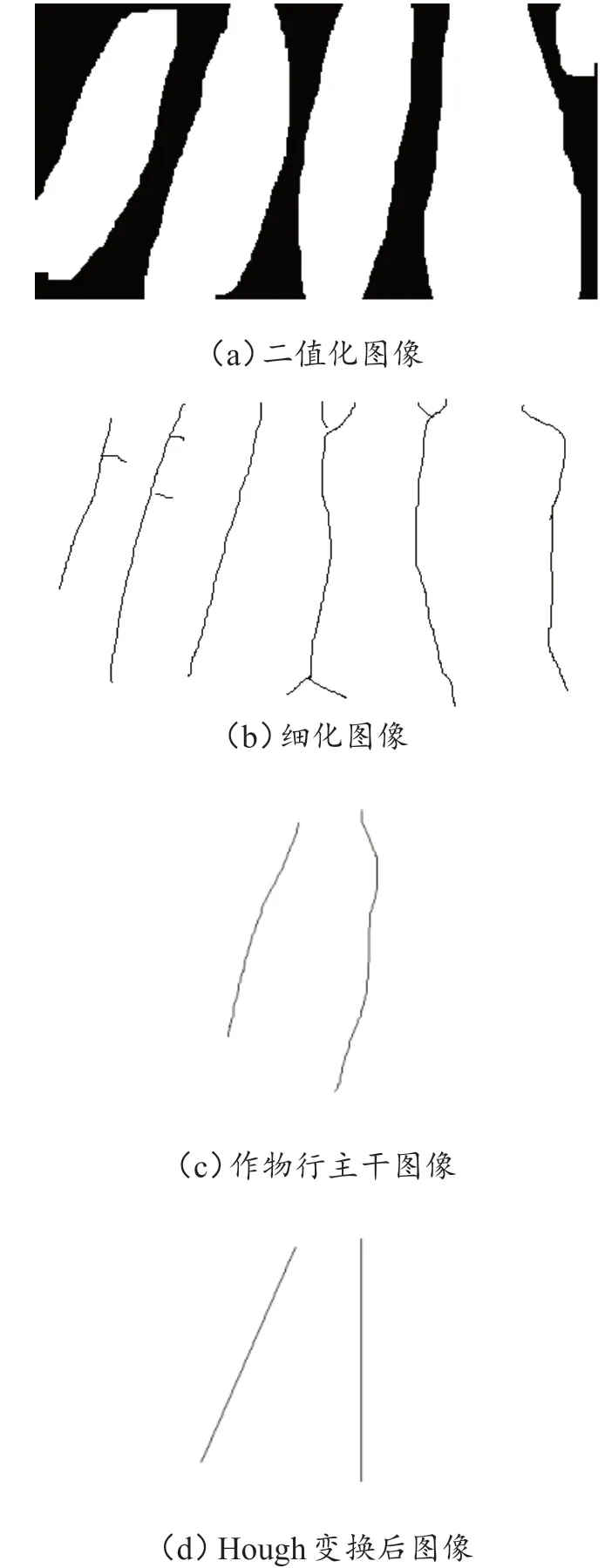
图3 作物行识别图像
2.5 施药决策
将图像进行预处理、滤波降噪、灰度化[16]、分割、特征提取等处理,划分高原夏菜的虫害类型及受害程度,并将蔬菜作物行提取作为施药量的判断依据。将不同的药液分类存储在机器人携带的药箱内,根据虫害类型选择药液,根据虫害程度设置施药速度,通过对机器人的控制来实现智能化的药液喷洒。机器臂上安装的喷雾设备为六嘴式可转动喷嘴,可以实现对高原夏菜从上至下的垂直喷洒。以喷嘴距离蔬菜上方30 cm、覆盖0.86 m2的范围为标准,在实际操作中可能存在偏差,因此工作过程中需要随时调整。
3 算法实现
本研究的算法流程如图4所示。首先利用工业摄像机拍摄高原夏菜的高清图,然后进行图像的预处理;接着使用Hough变换进行作物行提取,并划分虫害受损程度;将获取的处理信息反馈到系统中作为精准施药的依据;由系统向控制阀发出指令,调节药箱开闭、压力值、药液类型、喷洒速度,并将信息传输到控制系统进行实时调整,从而实现喷药的智能化。

图4 虫害识别及施药流程图
4 结论
本研究提出了一种高原夏菜虫害自动检测和精准施药的新方法。通过图像来获取高原夏菜的生长信息,通过对蔬菜叶片的特征提取来精准识别高原夏菜虫害,可以实现虫害类型自动分类和虫害等级划分,为精准施药提供了参考。开发了基于VC++的虫害识别、图像分割、作物行提取系统,系统处理一幅图像的时间约300 ms,快速、高效且精度好。应用在高原夏菜的智能化种植上可以大大节省人力物力。但是,由于作物背景复杂,在提取拍摄的图像信息时容易受到外界环境的干扰,所以还存在一定的缺陷。此外,过程中的算法较多,仍需改进。
