基于振动信号的交流接触器运行状态识别*
2022-09-20李瑞新刘树鑫曹云东
李瑞新, 刘树鑫, 曹云东
(沈阳工业大学 电器新技术与应用研究所, 辽宁 沈阳 110870)
0 引 言
交流接触器作为用于频繁切断和接通电机控制回路的低压电器,保证其在运行过程中正确动作是尤为重要的,但是随着其开断线路次数的增加,交流接触器触头烧蚀情况越来越严重,可能会导致其处于不安全运行状态,最严重的情况下,会导致切断或闭合线路失败,从而引起设备的损坏等重大经济损失,因此实现接触器运行状态的准确识别是尤为重要的[1-3]。
近年来,国内外的学者针对开关电器的状态识别研究主要分为3个方面特征提取,特征选择以及状态识别。文献[4]通过提取振动信号中的触头超程状态信息,对开关电器的状态进行识别;文献[5]采用主成分分析方法对提取的特征参数进行降维,并采用支持向量机(Support Vector Machines,SVM)的方法对开关电器的机械状态进行识别;文献[6]通过互信息以及最大相关最小冗余准则相结合得到最优特征参数,用于对开关电器的触头超程状态识别。文献[7]采用随机森林(Random Forest,RF)的方法实现对开关电器的单一机械故障的识别。综上所述,本文提出一种基于灰狼算法优化(Grey Wolf Optimizer,GWO)SVM的交流接触器运行状态识别方法,为了实现交流接触器整个寿命阶段不同运行状态的识别,需要以多维数据驱动,对交流接触器进行完整的寿命试验,获得可以表征其运行状态的特征参数。通过对提取的特征参数采用皮尔逊相关系数方法进行参数的特征选择,得到最优的特征参数集合,最后将得到的最优特征参数用SVM分类算法实现对接触器状态的识别。SVM适用于解决高维的,中小型的数据样本的分类和识别问题。本文通过GWO与SVM结合,采用狼群狩猎的方法对SVM的惩罚因子c和径向基核函数的参数g进行迭代寻优,提高了识别的效率[8]。
1 理论基础
1.1 皮尔逊相关系数
皮尔逊相关系数是用于衡量两个变量x和y之间的关联程度的方法[9]。相关系数所反映的是参数之间的线性关系以及变化趋势,其取值范围为[-1,1]。数据相关性如图1所示。
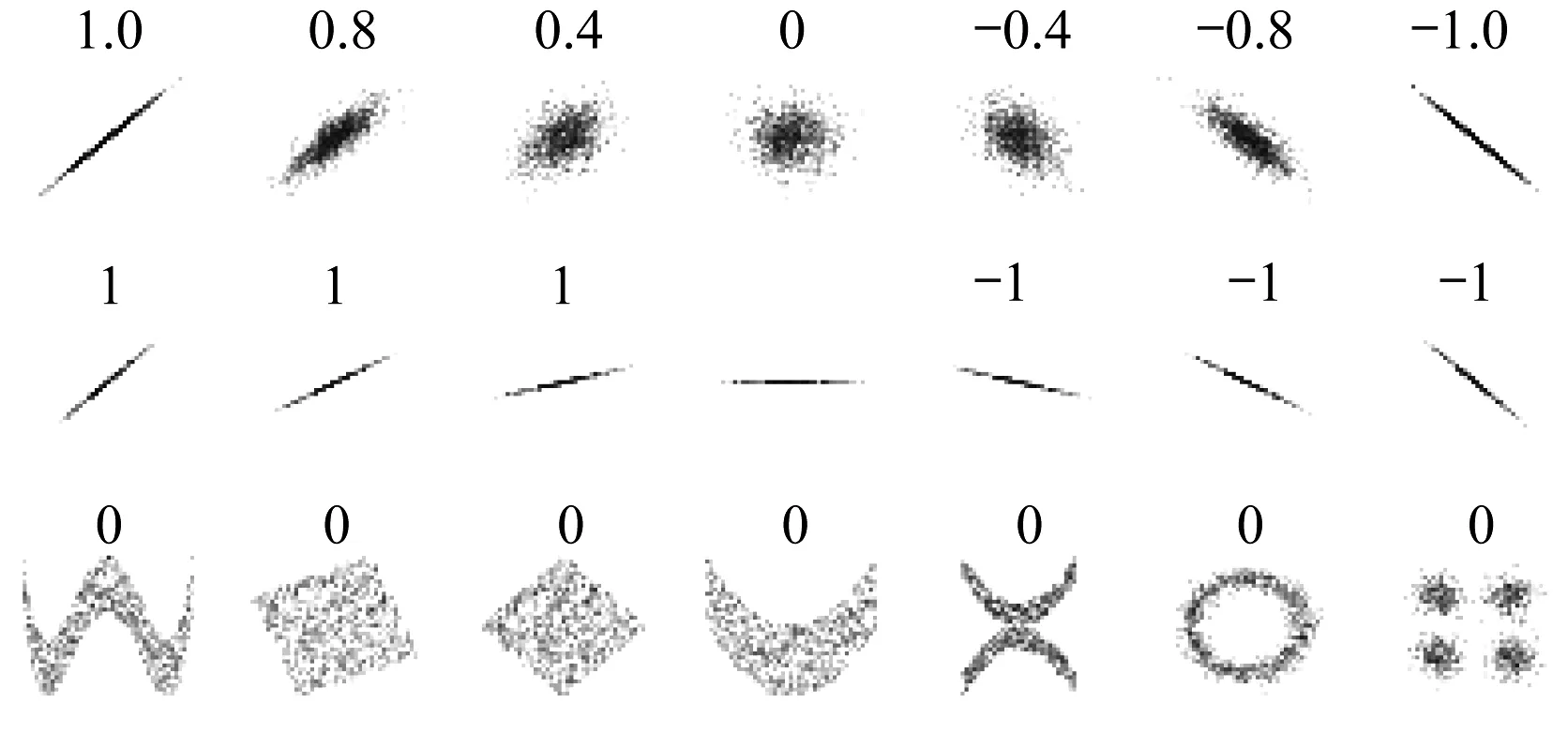
图1 数据相关性
相关系数的计算通常表示为两个参量之间的协方差和标准差的商Px,y,计算公式为
(1)
(2)
(3)
式中: cov(x,y)——参量x和y的协方差;
б——参量的标准差;
xi——参量x中第i个参数。
当Px,y中cov(x,y)与бx和бy的积相等时,Px,y的取值为正负1,表明两组变量完全相关,当Px,y的取值为0时表明两组变量不相关[10]。
1.2 基于GWO的SVM
SVM作为一种以统计学习理论和结构风险最小化原理为基础的机器学习方法,广泛应用于数据的分类与识别[11]。SVM方法常用于二分类,当采用核函数时可以解决非线性分类的问题,即特征空间存在超平面,使用非线性函数可以将原分类问题映射到更高维度的希尔伯特空间,此时决策超平面计算模型为
f(x)=wTφ(x)+b
(4)
式中:φ——映射函数;
w——用于调整分类超平面的法向量;
b——超平面和数据原点的间距长度。
数据中某点到超平面的长度极大值r为
(5)
对于线性参数分类时进一步由Lagrange构造函数进行极值的求解:
(6)
式中:α——Lagrange算子。
对于非线性参数分类引入松弛因子c时,目标函数变为
(7)
本文构造核函数时为
(8)
式中:x——参量;
y——参量;
g——径向基核函数的参数。
GWO作为一种群智能优化算法,具有程序简洁,收敛性强的优点,以狼群狩猎习惯为参考,采用对狼群阶级划分,对猎物跟踪狩猎[12]。其算法具有程序简单,收敛性能好,易于实现的优点,因此本文采用GWO对SVM的参数c和g进行迭代寻优,从而提高识别的效率与准确性[13]。GWO-SVM程序流程如图2所示。
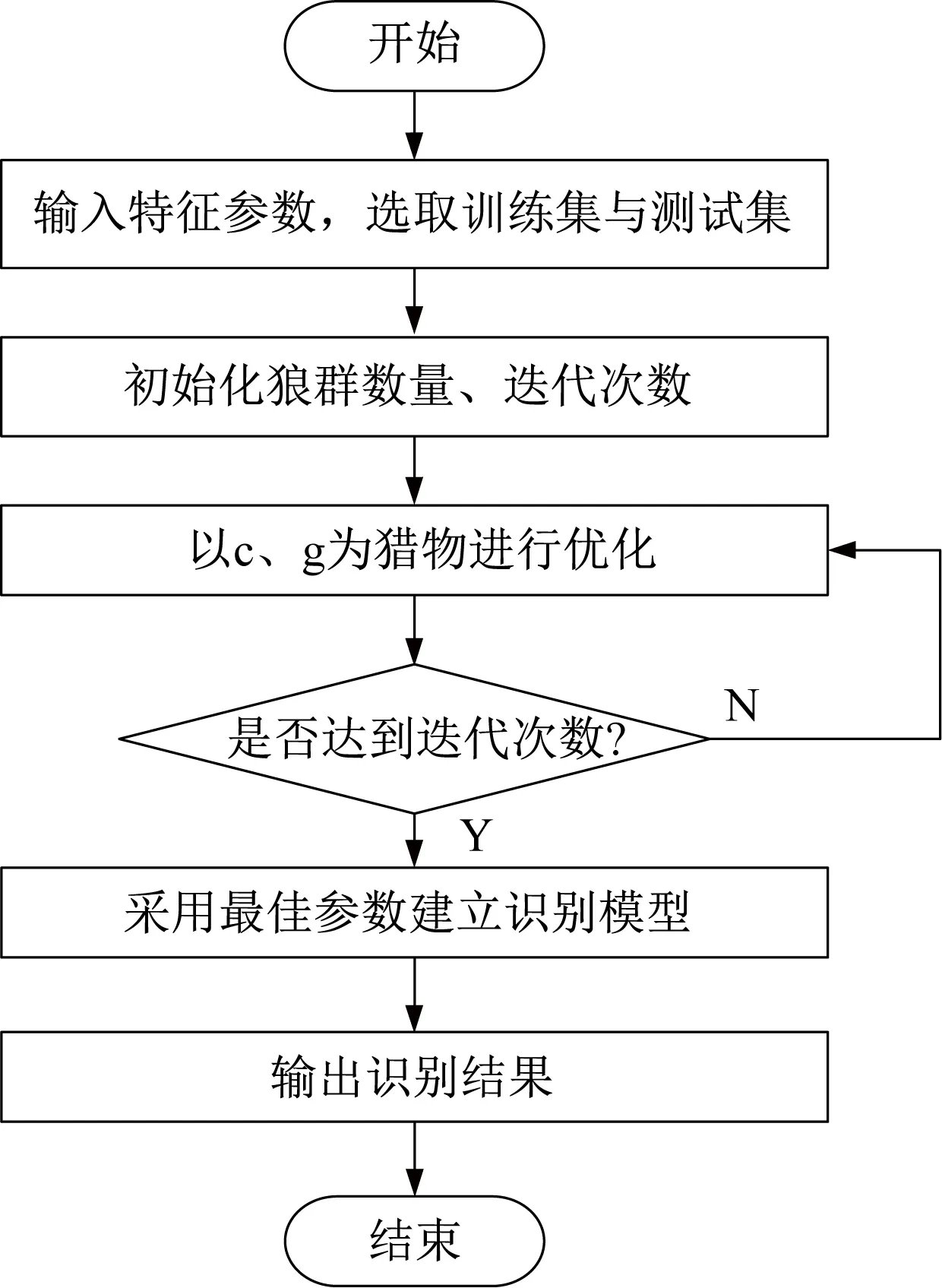
图2 GWO-SVM程序流程
基于GWO-SVM的交流接触器运动状态识别研究的具体方法如下:
(1)通过交流接触器全寿命试验获得接触器的三相触头电压电流、线圈电压以及触头振动信号实验数据,并提取接触器的电气参数以及振动信号的时域频域特征参数;
(2)计算提取的特征参数与开断次数的相关系数,得到特征参数相关性排序,并剔除相关系数值较小的特征;
(3)计算得到各参数之间的相关系数矩阵,对特征参数进行去冗余,得到最优特征参数子集;
(4)将最优特征子集中的特征输入到GWO-SVM中分类,实现对接触器运行状态的识别。交流接触器运行状态识别流程如图3所示。
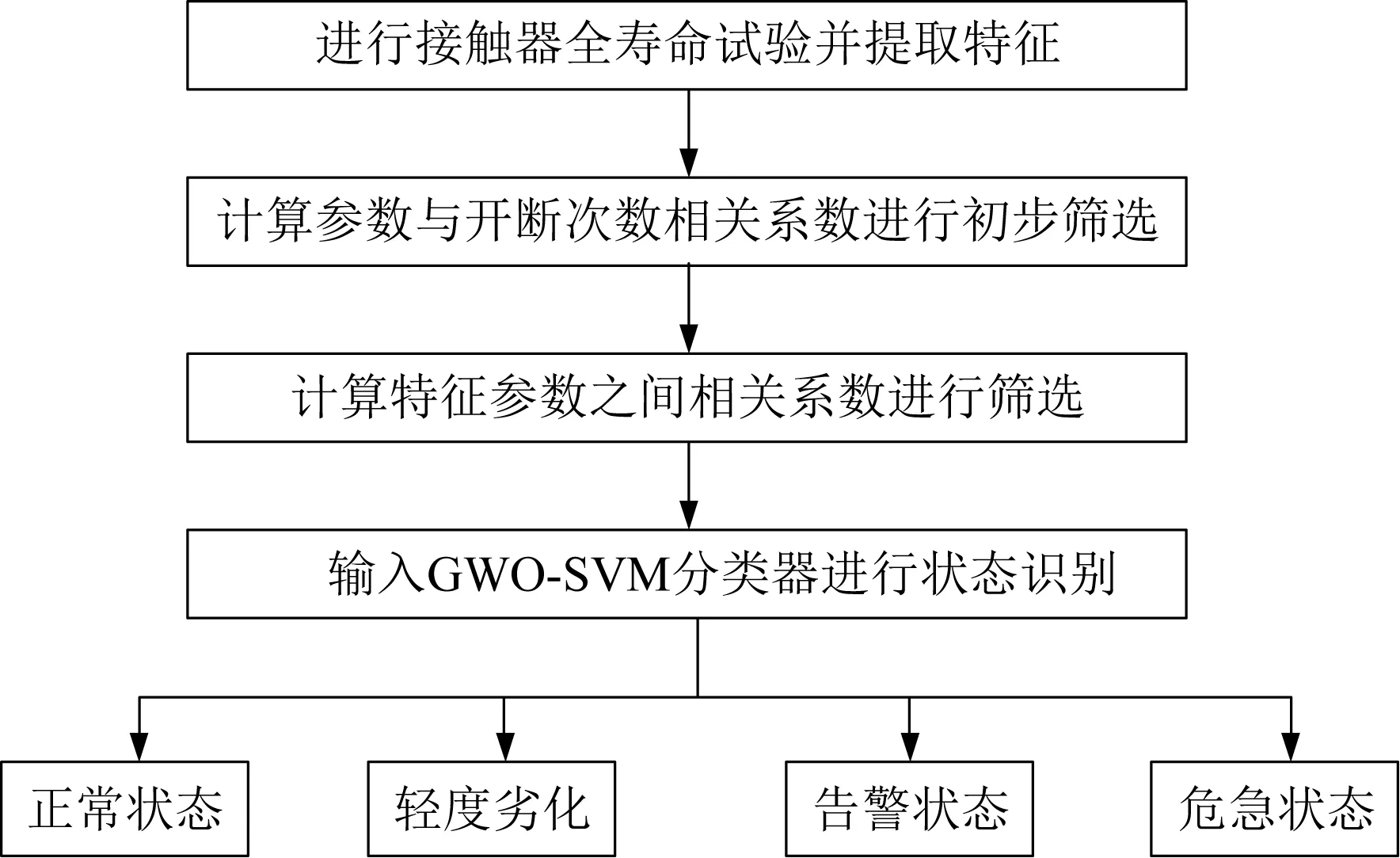
图3 交流接触器运行状态识别流程
2 试验系统设计
本文试验依据GB/T 14048.4—2020中所规定的电磁式接触器试验条件,对CJX2—5011型交流接触器进行试验,并使接触器运行在AC-4的工作条件下。这种工作条件以6倍的额定电流接通和分断电路,使接触器的性能退化更明显,能够较好地反映接触器在整个寿命周期中运行状态的变化。
交流接触器运行状态研究试验系统的硬件原理如图4所示。接触器运行状态研究试验平台如图5所示。加速度传感器安装实物图如图6所示。试验系统程序控制流程如图7所示。
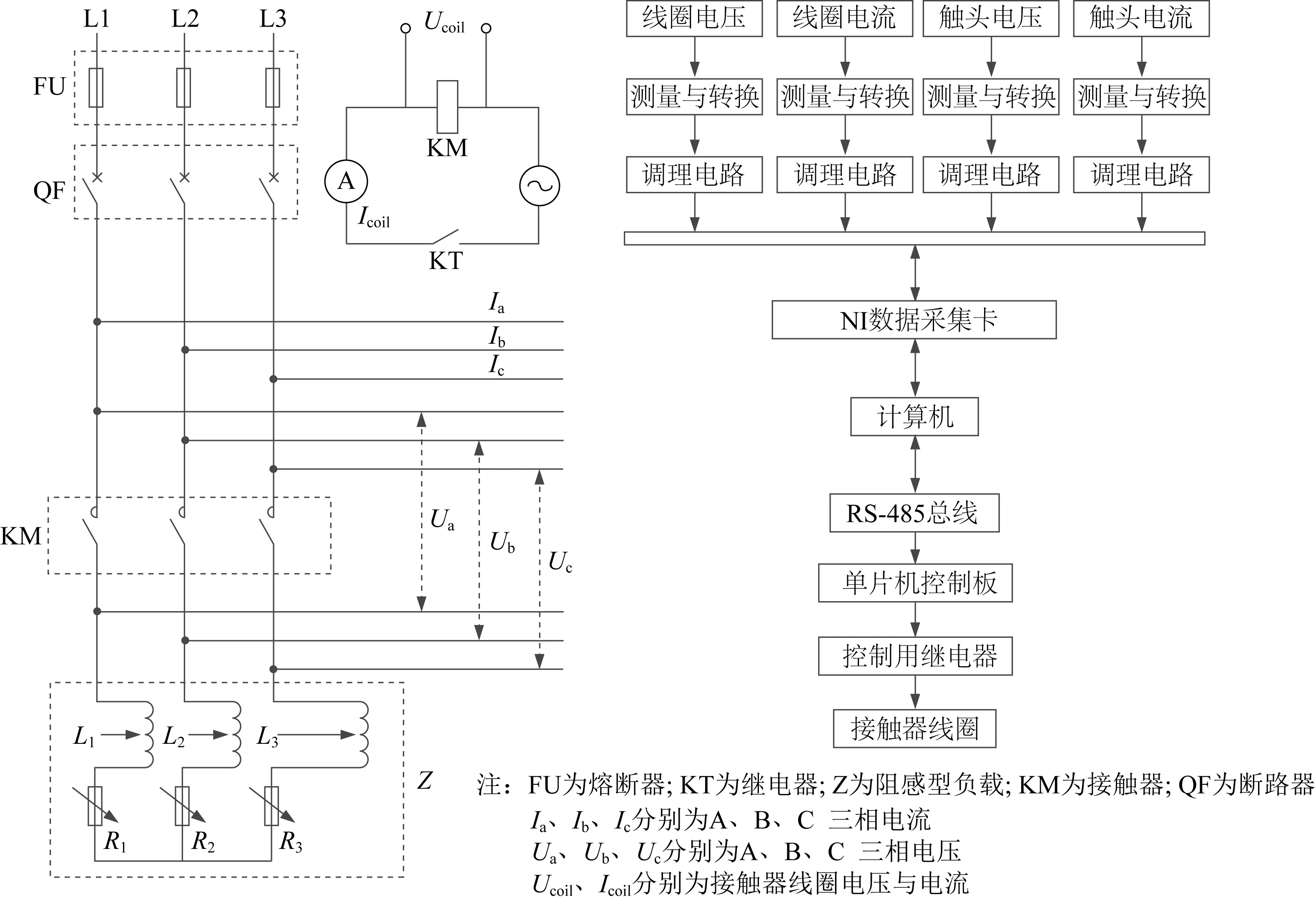
图4 交流接触器运行状态研究试验系统的硬件原理
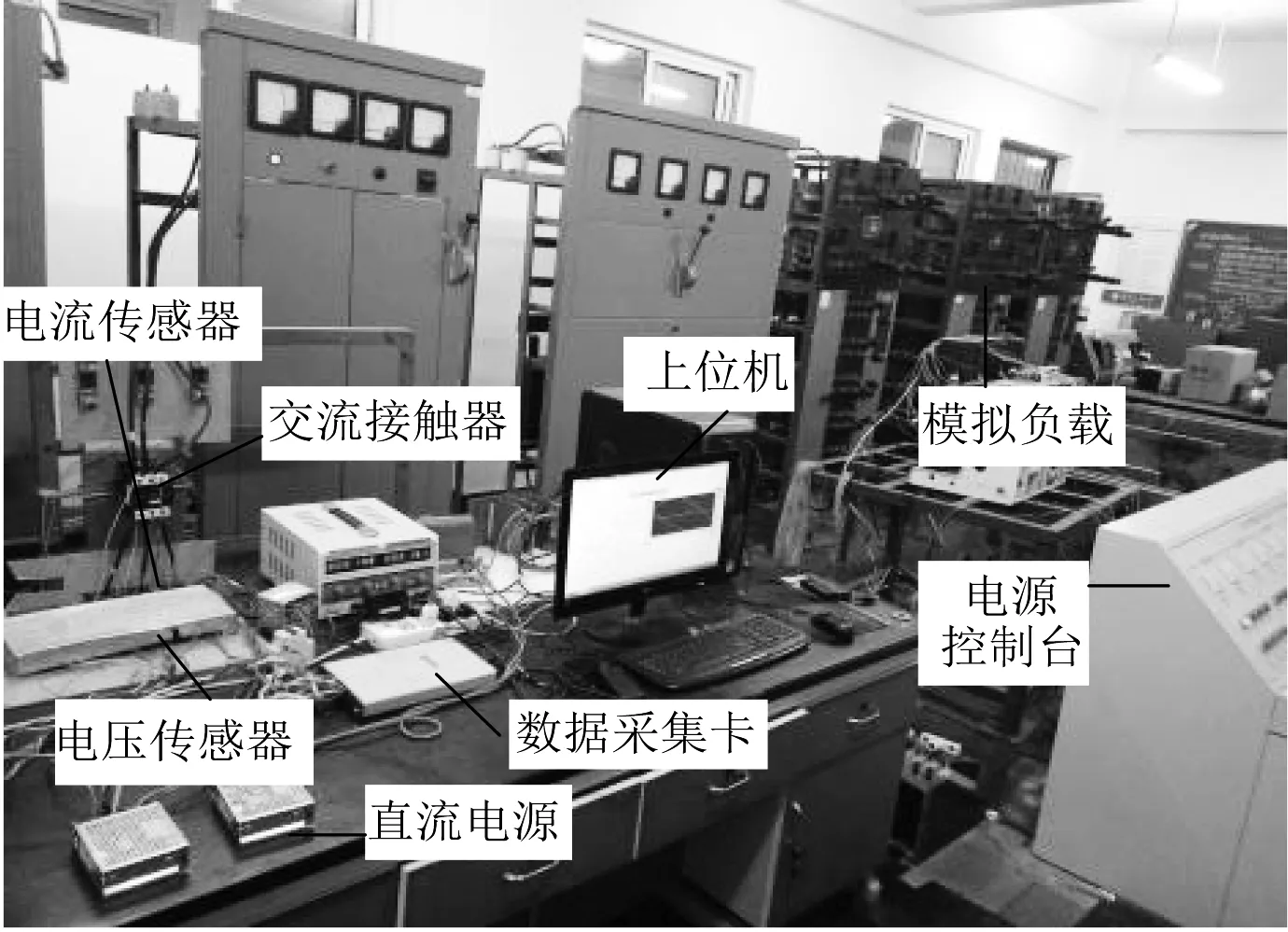
图5 接触器运行状态研究试验平台

图6 加速度传感器安装实物图

图7 试验系统程序控制流程
3 状态划分与识别实例分析
3.1 特征参数提取
通过对交流接触器实验数据的分析,当接触器的运行状态变化时,振动信号的时域和频域图像也会随之发生明显的变化。以分闸阶段振动信号为例,振动信号时域、频域图分别如图8、图9所示。
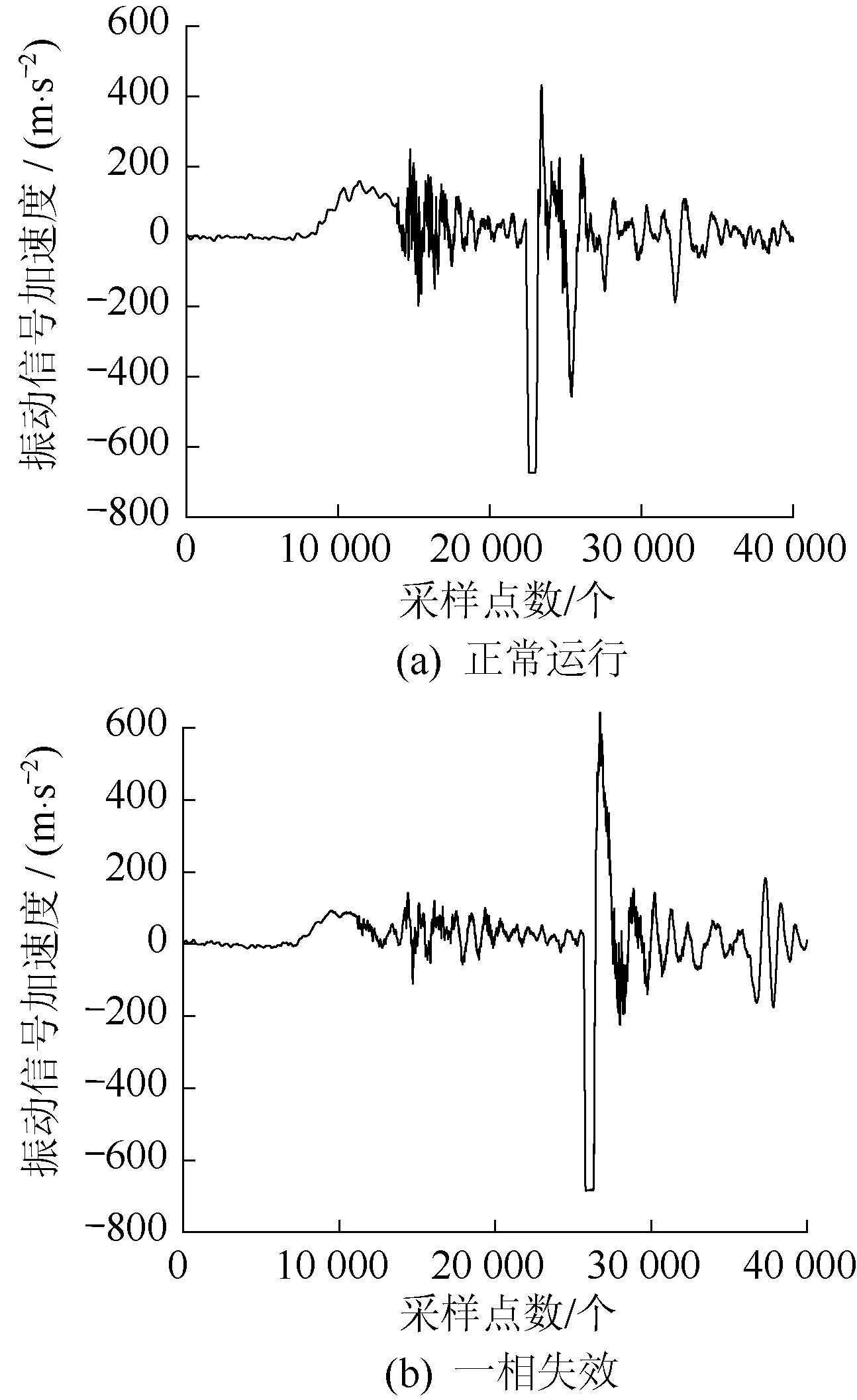
图8 振动信号时域图
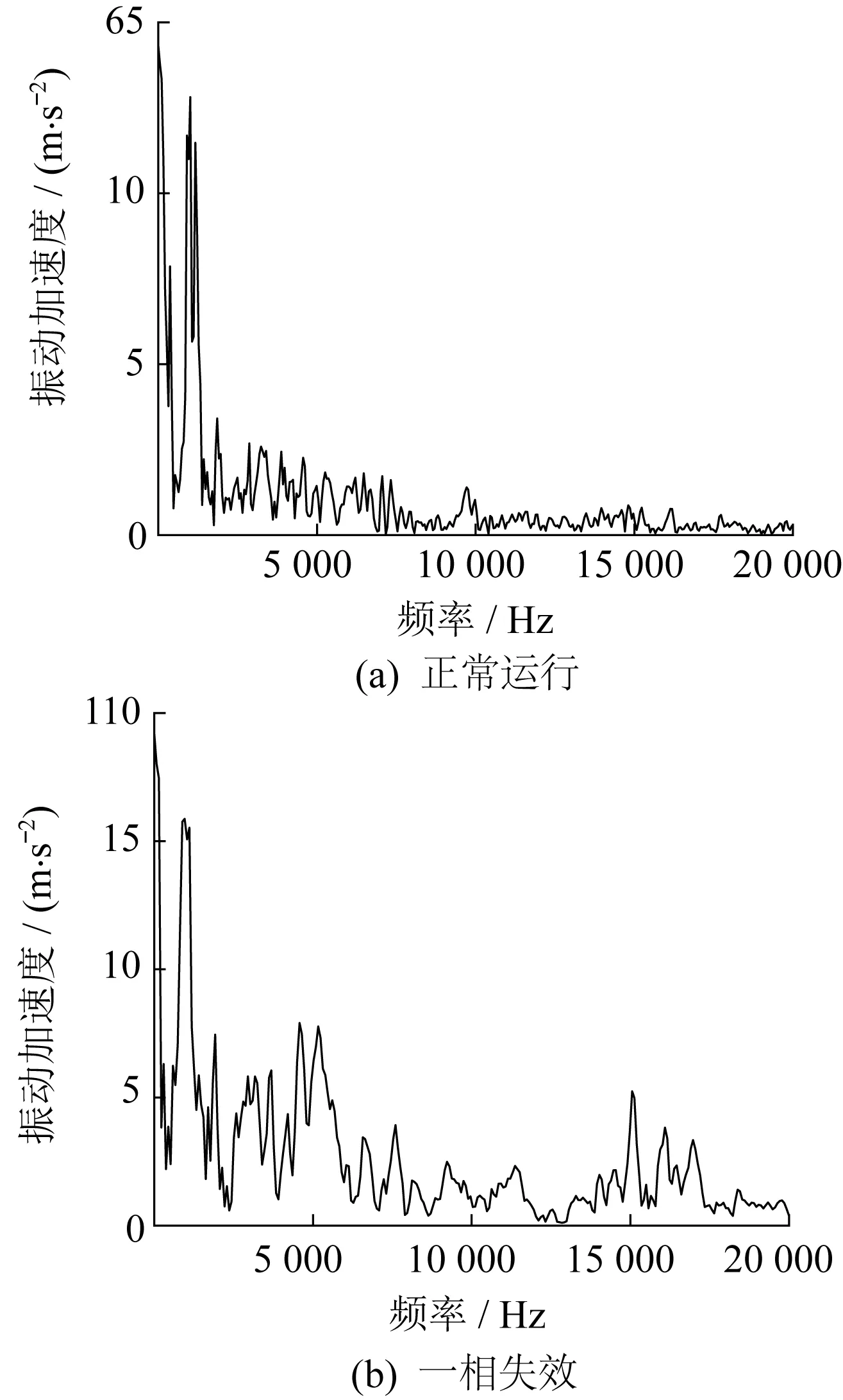
图9 振动信号频域图
由图8、图9可见,随着开断次数的增加,振动信号的时域、频域图像存在明显的变化,因此提取实验所获振动信号的时域和频域特征作为表征交流接触器运行状态的机械参数,用于对接触器的状态划分和识别。振动信号特征参数计算表达式如表1所示。
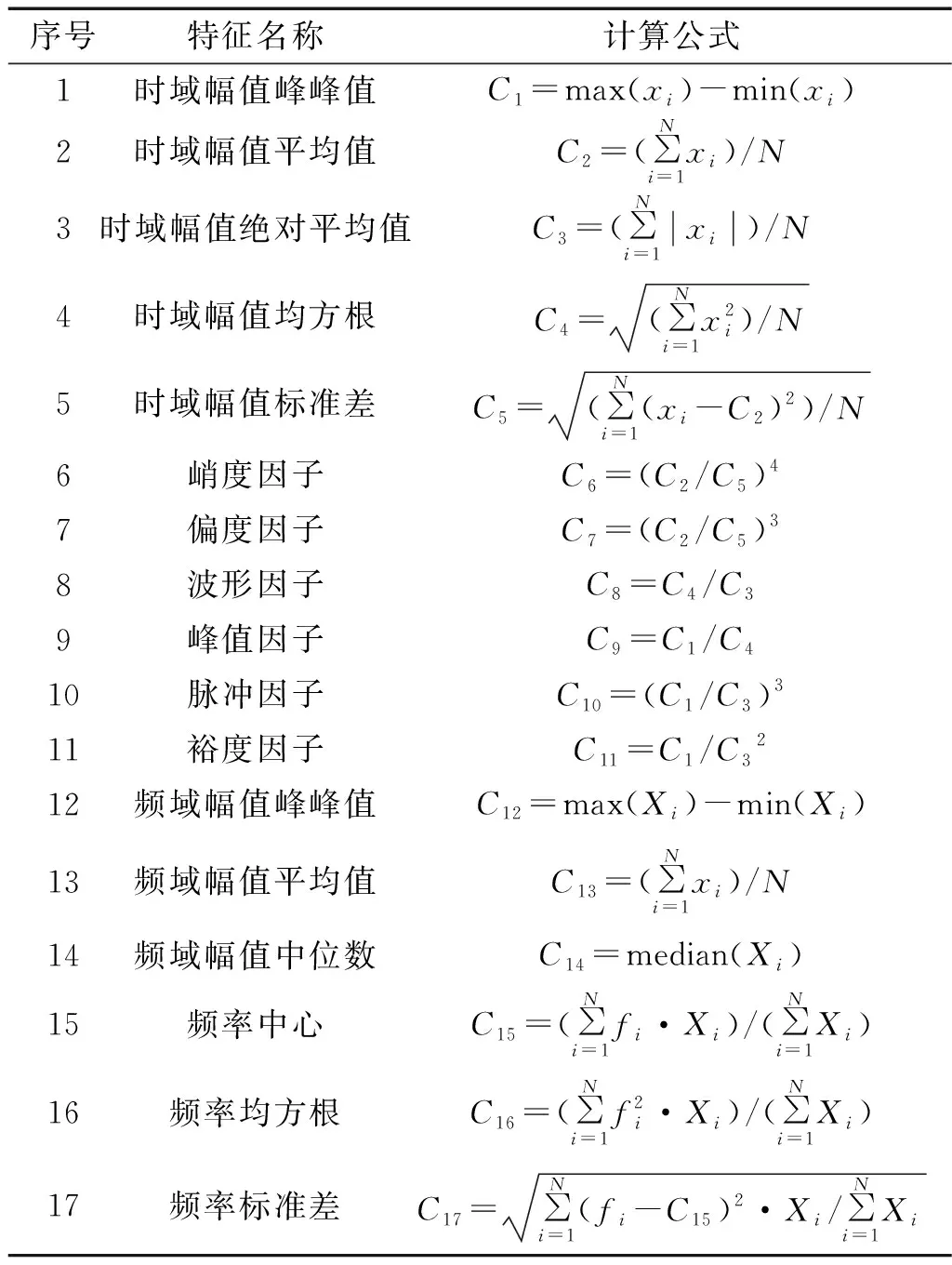
表1 振动信号特征参数及计算表达式
表1中xi为接触器动作时振动信号时域波形第i个点的值;Xi为频域波形下第i个点的值;fi为频域波形下第i个点的频率值。
3.2 特征参数的选择
提取后的参数维数较高,需要对参数进行特征筛选,对于开关电器来说,开断次数与其运行状态有着紧密的关系,因此本文采用皮尔逊相关系数方法计算特征与开断次数的值,筛选掉相关性较低的参数。由于相关系数的正、负只与数据的方向性有关,所以下文都对相关系数取绝对值计算,以相关系数值得到的特征排序为依据,进行特征参数之间的冗余特征剔除。相关系数值的取值范围及含义如表2所示;特征参数与开断次数的相关性如图10所示。
表2 相关系数的取值范围及含义

图10 特征参数与开断次数相关性
通过上述计算,去掉C2、C3、C4、C12、C13、C14这6个与开断次数相关性较低的参数,进一步计算参数之间的相关性,以剔除冗余度高的参数。参数之间冗余程度热图如图11所示。
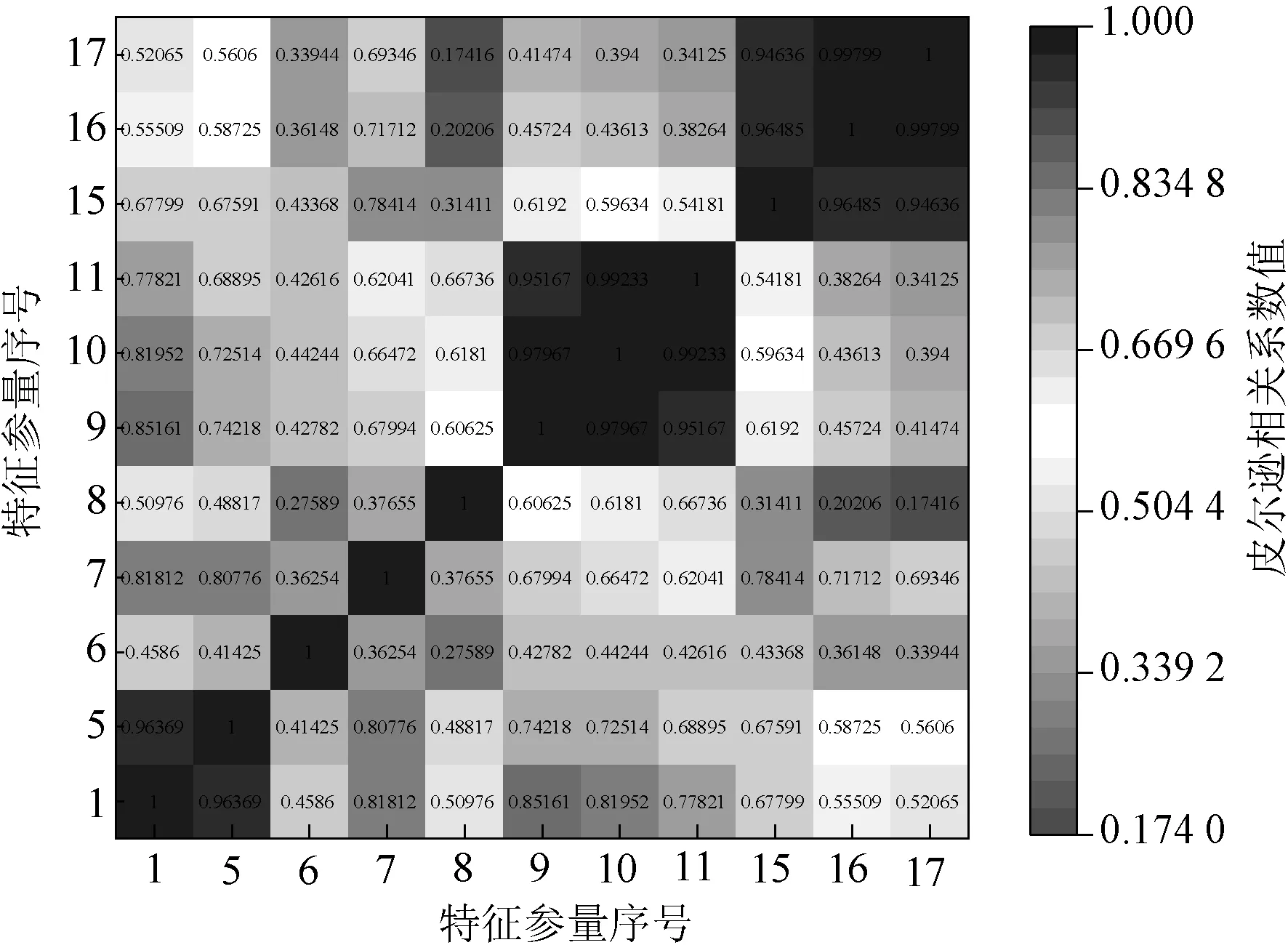
图11 参数之间冗余程度热图
通过求得的参数之间相关系数,可得出C1和C5,C9、C10和C11,C15、C16和C17这3组数中存在冗余,按照上文的参数排序最后得到最优特征子集为C5、C6、C7、C8、C9、C15。
3.3 运行状态识别
本文采用GWO对SVM的参数进行自适应的参数优化,从而提高对运行状态识别的准确度。采用上文经过选择的特征,对接触器运行状态进行识别,将交流接触器的整个寿命周期均分成4种状态:正常状态,轻度劣化状态,告警状态和危急状态。从4种状态中进行数据的随机抽取,4种状态共400组数据,从每种状态的100组数据中随机选取80组数据用于模型的训练,剩余的20组用于模型的测试,经过GWO-SVM得到对4种状态的识别准确率为93.75%。GWO-SVM测试集的实际分类和预测分类图如图12所示。由图12可见,GWO-SVM方法对接触器危急状态的识别率达到了100%。
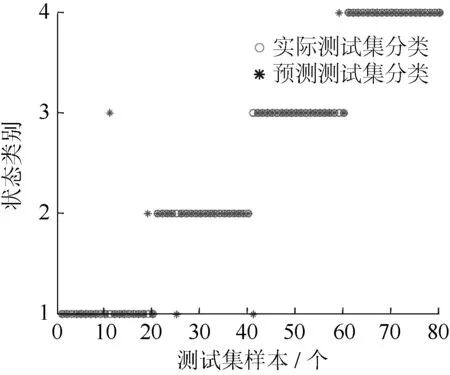
图12 GWO-SVM测试集的实际分类和预测分类图
为了对比本文采用的分类方法的优越性,采用目前对状态识别研究常用的分类器进行对比,采用RF对接触器的状态进行识别,准确率为88.75%,RF测试集的实际分类和预测分类图如图13所示;采用SVM对接触器的状态进行识别,准确率为86.25%,SVM测试集的实际分类和预测分类图如图14所示。其中图12、图13、图14中的4种状态类别,按顺序分别对应正常状态,轻度劣化状态,告警状态和危急状态。
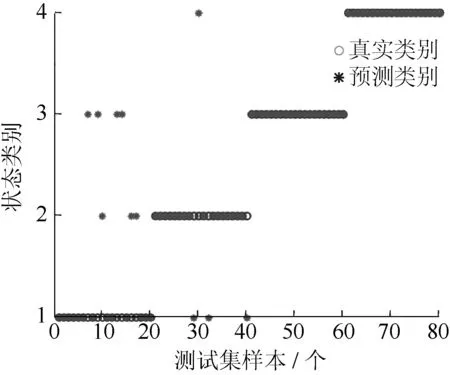
图13 RF测试集的实际分类和预测分类图
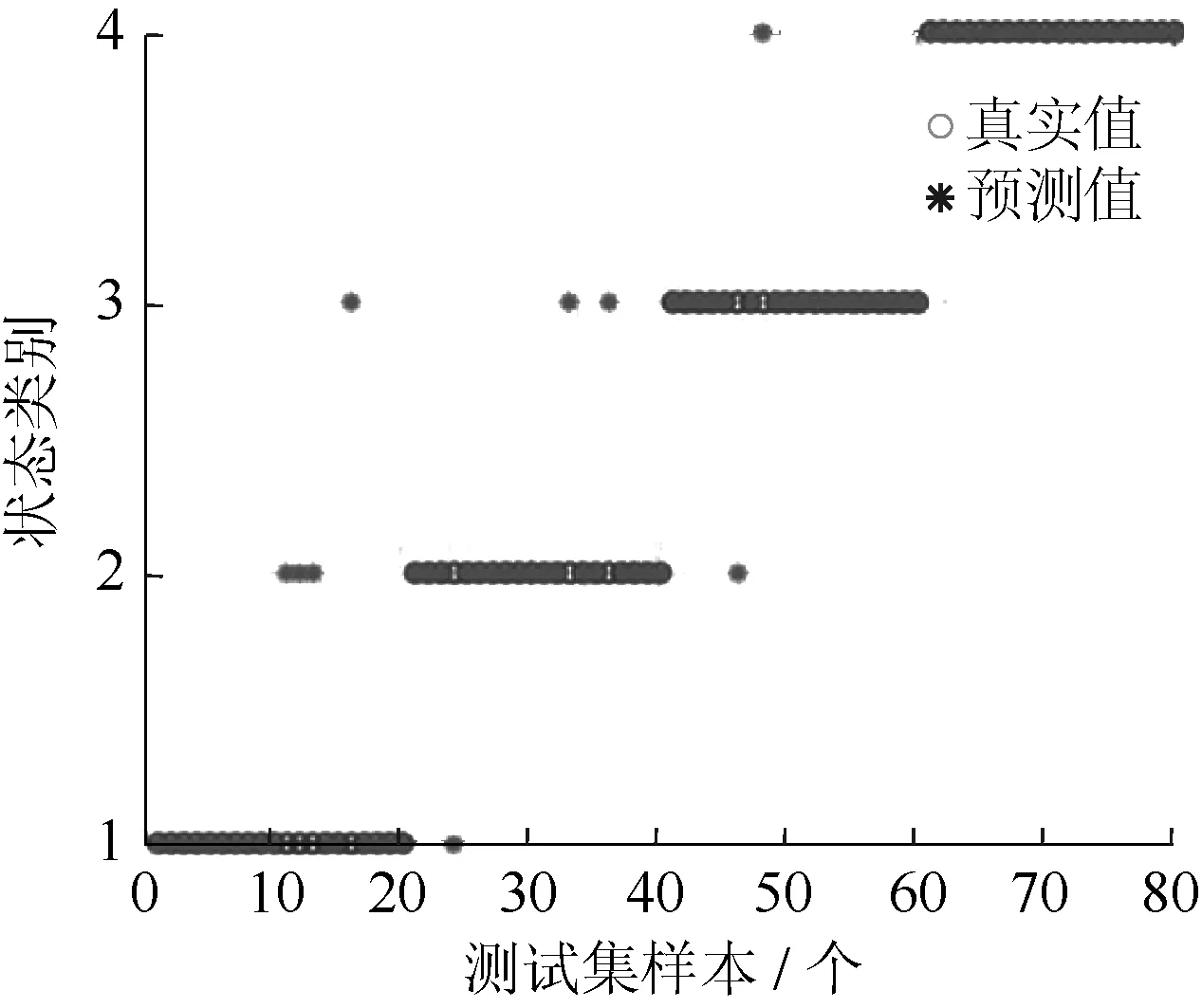
图14 SVM测试集的实际分类和预测分类图
为了避免数据分类的片面性,因此多次从4种状态中随机提取400组数据,按照上文相同方法,对接触器的4种状态进行分类。多组测试集的分类准确率如图15所示。

图15 多组测试集的分类准确率
重复上述步骤,对原始特征的参数采用同样的方式进行选择、训练、分类。将采用不同分类器对特征参数的识别准确率进行对比。原始特征参数分类结果如表3所示。
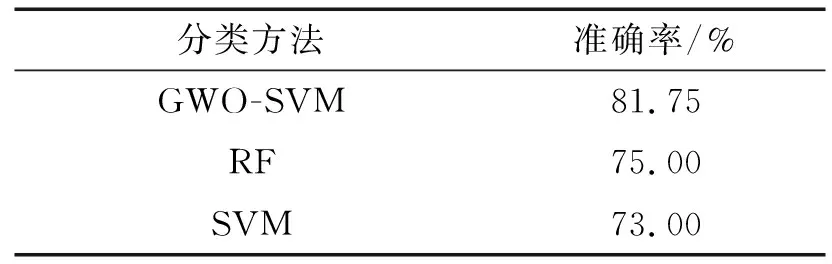
表3 原始特征参数分类结果
4 结 语
本文以CJX2-5011型号交流接触器为试验研究对象,提出了一种基于GWO-SVM的交流接触器运行状态识别方法,通过试验数据验证证明,所采用的方法可以有效地实现接触器运行状态有效的识别。得到如下结论:
(1)设计了一种交流接触器运行状态研究系统,获取全寿命周期下交流接触器分、合闸过程的振动信号波形,为进一步实现交流接触器运行状态识别提供依据。
(2)在交流接触器的运行状态识别方面,对于采用振动信号的时域以及频域特征可以实现接触器运行状态的识别。
(3)在进行运行状态识别时,用于识别的特征参数需要进行特征筛选,本文采用的选择策略可以有效地提高识别的准确率,同时采用GWO-SVM方法的识别准确率明显高于其他两种识别方法的准确率。
