基于特征优化的面向对象建筑物提取①
2022-09-20曹建农
李 星, 曹建农
(长安大学 地质工程与测绘学院, 西安 710054)
随着遥感技术的不断发展, 遥感影像处理技术也越来越成熟. 目前许多学者使用基于像素的方法进行建筑物提取. Huang 等通过建筑物阴影的形态学指数提取高分影像上的建筑物[1,2]; Lin等利用边缘检测算法和建筑物在影像上的规则排列方向及外形完成建筑物的定位提取[3]. 相比于基于像素的提取方法, 面向对象的方法能够综合考虑目标的光谱、纹理和空间结构特征[4], 更适合建筑物的提取. 朱芳芳等[5]建立了一种基于特征分量的面向对象模型来实现对高分影像城市建筑物的提取. 施文灶等[6]通过图像分割理论实现高分影像上的建筑物的变化监测. 在基于特征优化的地物提取方面, 梁加玲等[7]基于Relief算法的多分类算法ReliefF算法进行特征优化后识别的耕地图斑, 取得较好提取结果. 肖艳等[8]基于ReliefF和PSO的混合特征选择方法选择最优特征子集, 并使用支持向量机分类器对土地进行分类. 但是这些方法并没有有效去除冗余特征, 没有构成最优特征子集, 效率不高. 因此本文将Relief算法和FCBF算法相结合,有效去除了不相关特征和冗余特征, 构成最优特征子集进行建筑物提取, 提高了提取精度和效率, 为今后基于特征优化的建筑物提取提供借鉴意义, 并且对建筑物的信息有一个清晰准确地掌握.
1 研究方法和原理
本文主要是基于特征优化进行建筑物提取, 在遥感影像提取过程中, 并非特征越多, 提取建筑物越容易,应该在繁多特征中选出有用特征, 提高分类精度, 技术流程如图1所示.
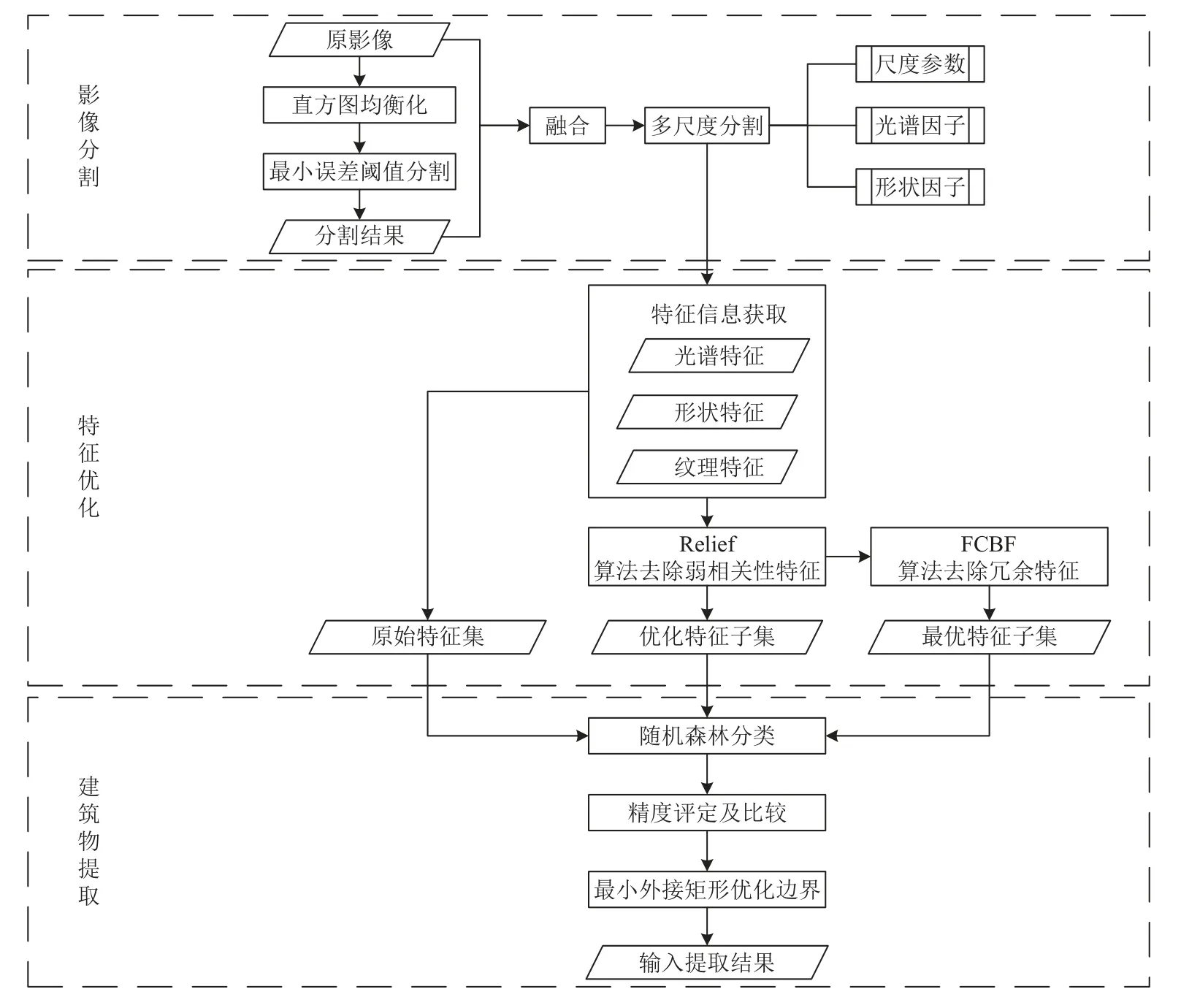
图1 技术流程图
1.1 影像分割
1.1.1 最小误差阈值分割
一幅影像大小为M×N, 其每个像素点(x, y)的灰度值为f(x, y). 用直方图h(g)描述图像灰度概率分布.假设理想的灰度分布模型符合混合正态分布p(g)=其中 pi表示子分布的先验概率, p(g)的两个子分布p(j|i)分别服从均值为i[9], 方差为σ2的正态分布.
对于阈值 t ∈G, Kittler等基于最小分类误差思想给出下面的函数[9]:
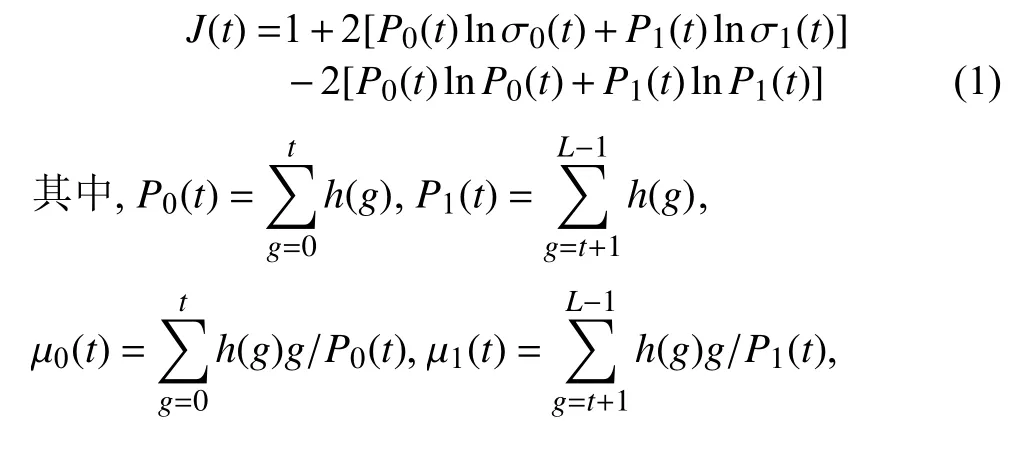

最佳阈值选为使J(t)最小化的t=t*.

上述方法称为最小误差阈值法[9]. 对影像进行最小误差阈值分割处理, 得到建筑物初步分割结果, 如图2所示, 此算法可以很好的分割建筑物和非建筑物, 但仍然将部分道路误分为建筑物.
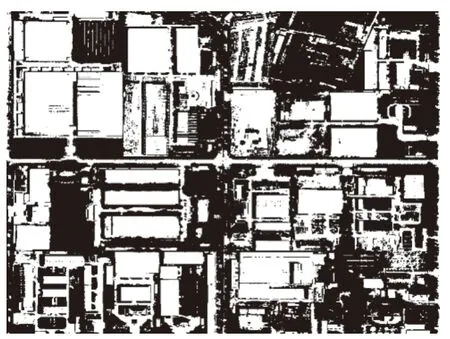
图2 最小误差阈值分割结果
1.1.2 多尺度分割
多尺度分割是指在影像信息损失最小的前提下,基于异质性最小原则的区域合并算法, 以任意尺度生成最小异质性和最大同质性的有意义影像多边形对象的过程[10], 其是一种影像抽象的手段, 即把高分辨率像元的信息保留到低分辨率的对象上, 不同的地物类型可以在相应尺度的对象上得到反映. 多尺度分割的参数构成包括光谱和形状两个因子, 其中形状因子又包括光滑度(smoothness)和紧致度(compactness) . 大多数情况下, 颜色因子对生成对象最重要, 形状因子有效控制着影像对象的破碎程度, 可以防止“同物异谱”和“同谱异物”现象与“胡椒盐效应”, 以此提高分类精度.
各个波段分割权重的确定十分重要. 通过计算影像的相关性矩阵和协方差矩阵确定其R、G、B三波段分割权重[11], 结果如表1和表2所示. 从表可得R、G、B三波段方差大小相当, 且波段之间的相关性显著, 对分割的贡献度大[7], 所以把R、G、B的权重均设为1.
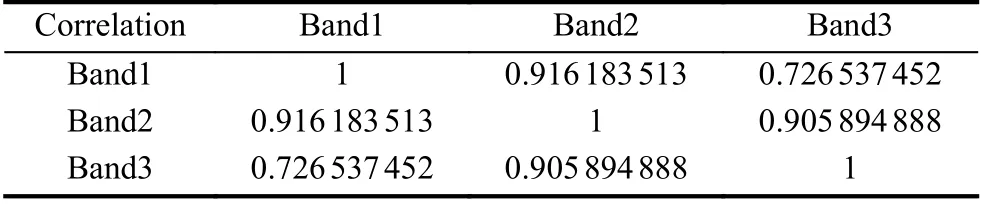
表1 波段的相关性矩阵
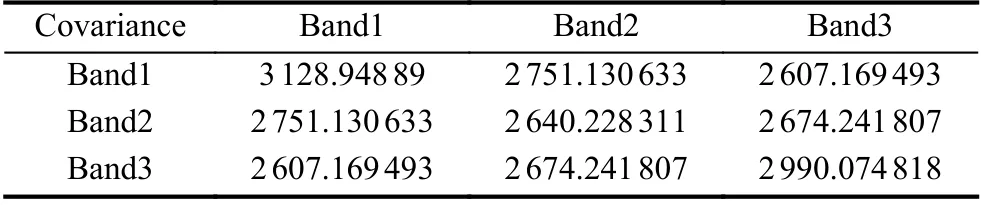
表2 波段的协方差矩阵
确定多尺度分割的最优参数和最优尺度是多尺度分割的关键, 包括shape、compactness因子和scale尺度. 对各因子做0.1-0.9的多次重复实验, 观察分割结果与建筑物边界的贴合程度以及“过分割”和“欠分割”现象. 如图3和图4所示, 最终确定最优shape为0.6,最优compactness为0.5. 使用局部方差法进行分析确定最优scale, 如图5所示, 该影像对象同质性局部变化(local variance)取得极大值时对应最优得分割尺度scale, 最后可得最优分割尺度为125.
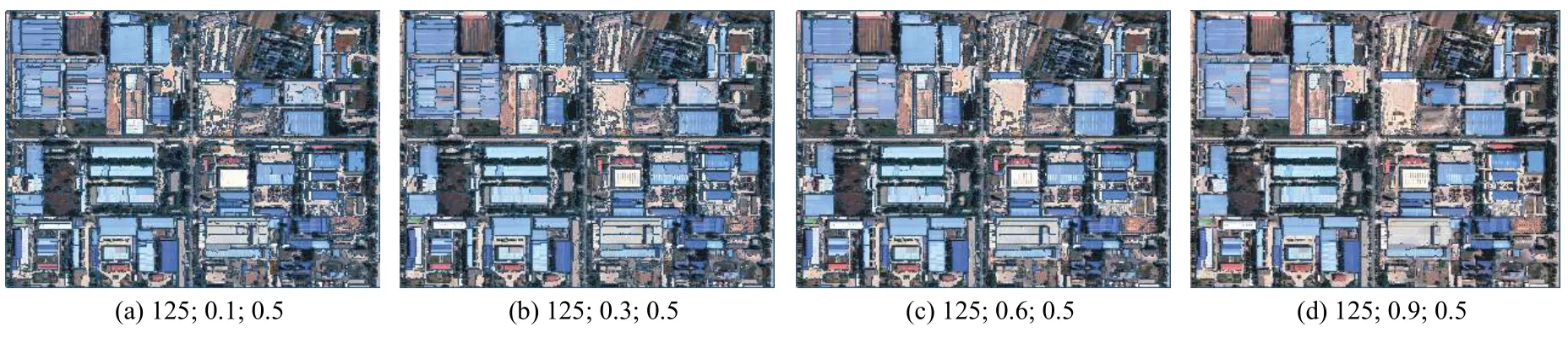
图3 不同形状因子参数分割效果(分割尺度, 形状因子, 紧致度)
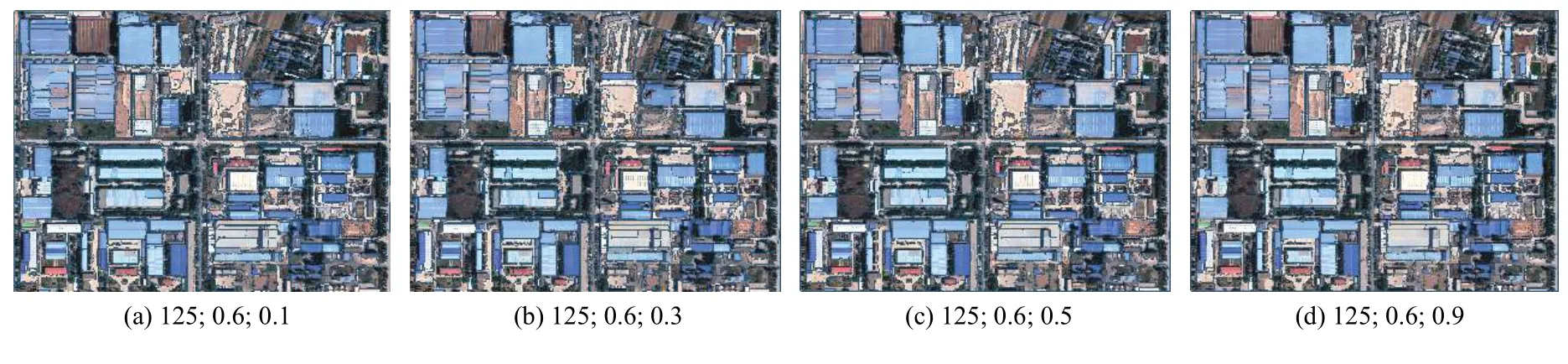
图4 不同紧致度参数分割效果(分割尺度, 形状因子, 紧致度)
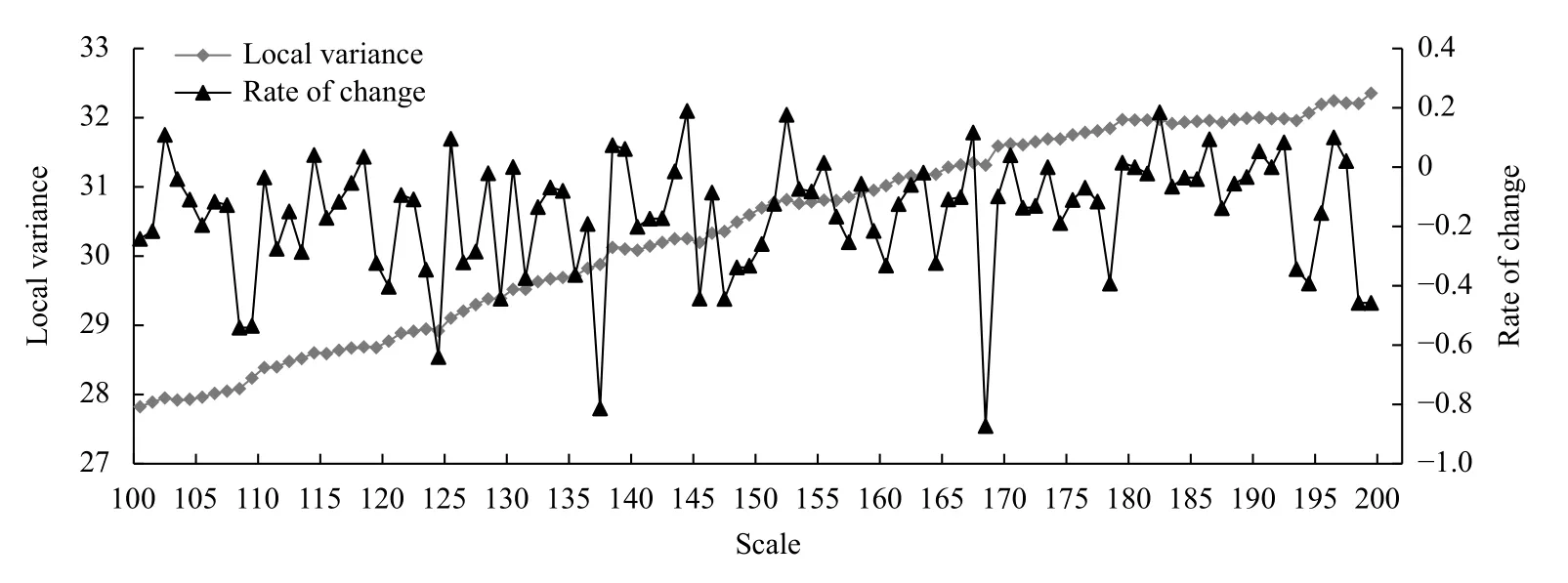
图5 局部误差分析
仅多尺度分割方法存在较多的过分割和欠分割现象, 因此将最小误差阈值分割结果与多尺度方法进行融合, 改进部分欠分割与过分割现象. 由图6可知, 与仅多尺度分割结果相比, 改进的多尺度分割方法能够分割出更多的细小地物且完整性较好, 分割效果更好. 由于分割的精度会对分类结果产生较大影响, 所以改进的多尺度分割也会提高最终建筑物分类的精度.
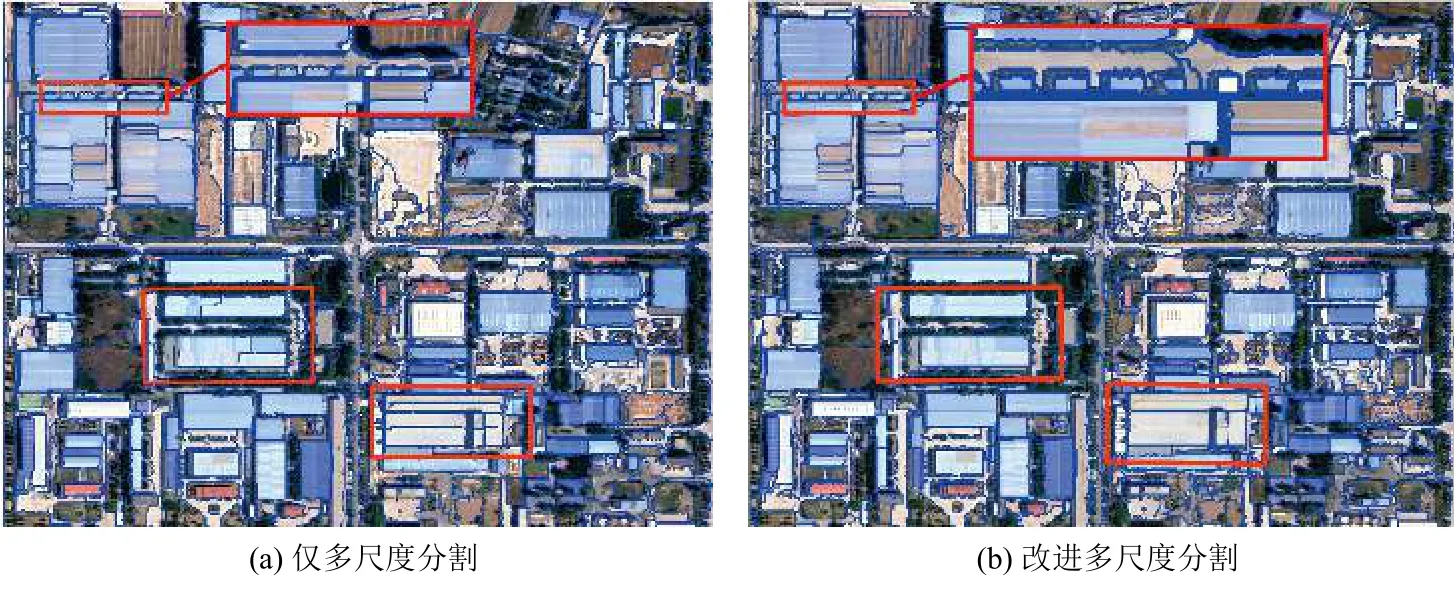
图6 影像分割结果对比
1.2 特征选择
特征空间集中包括不相关特征性和相关性特征,相关性特征中由包括弱相关性且冗余特征、弱相关性但不冗余特征和强相关性特征. 其中弱相关性但不冗余特征和强相关性特征构成了最优特征子集, 关系图如图7所示. Relief算法和FCBF算法能互相弥补缺陷, 可有效去除弱相关性特征和冗余特征.
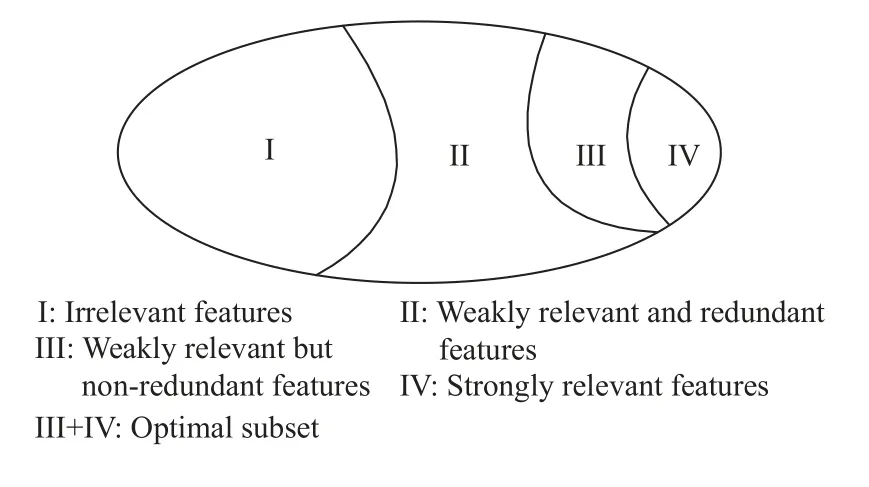
图7 特征关系图
1.2.1 Relief算法
Relief算法是一种特征权值算法(feature weighting algorithms), 依据所有特性和类型的关联性给与特点差异的权值, 权值低于特定阈值的特性将被删除. Relief算法中特征和类别的相关性是基于特征对近距离样本的区分能力[11]. 计算特征权重公式如下:
其中, d iff(A,R1,R2) 表 示样本R1和 R2关于特征A的距离差值, m表示抽样次数, Mj(C) 表 示最近邻样本, P (C)表示对象样本所占比例[12].
获取影像中每个对象的多个特征, 其中包括9个光谱特征, 27个形状特征和60个纹理特征, 经过Relief算法可有效去除不相关性特征和弱相关性特征, 通过计算各特征的权重均值, 得到前50特征权重如图8所示.
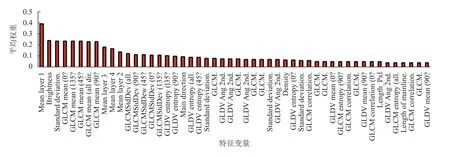
图8 前50特征变量的平均权重
1.2.2 FCBF算法
FCBF算法的全称是fast correlation-based filter即快速相关性滤波算法, 提出应用SU (smymetrical uncertainty)代替信息增益IG (information gain)作为衡量一个特征是否与类别C相关或者是否冗余[11]. 计算公式如下:
其中, H表示信息熵, Pi表示某个灰度在该图像中出现的概率, 由灰度直方图得到.
由于Relief算法本身存在局限, 不能去除冗余特征, 而FCBF算法正好可以弥补它的缺陷, 可有效的去除冗余特征. 所以对前50特征进行FCBF特征提取并进行精度分析. 由图9可知, 当特征数目为13时的总体分类精度(OA)和Kappa系数最高, 所以最优特征子集数目为13, 具体特征包括3个光谱特征: Brightness、MeanLayer2和Standard deviation Layer 2; 2个形状特征: Density和Main direction; 8个纹理特征: GLCM Mean (0?、GLCM Mean (135?、GLDV Ang.2nd moment (135?、GLCM Homogeneity (90?、GLDV Ang. 2nd moment (0?和GLDV Ang.2nd moment(0?.
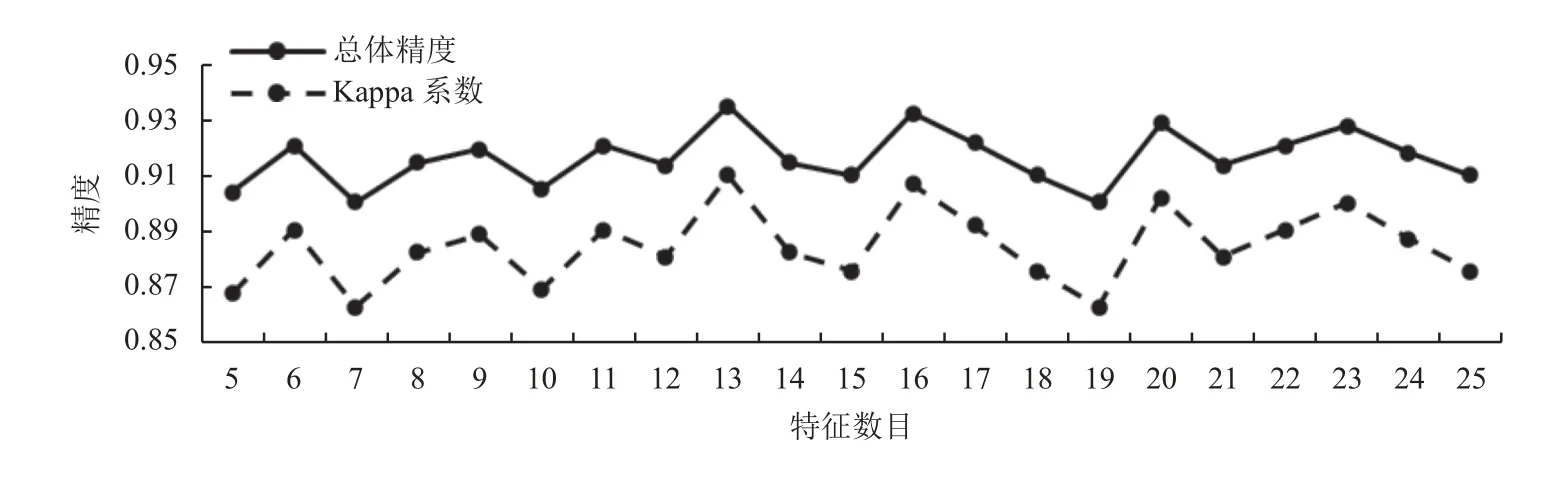
图9 不同特征数目的提取精度
1.3 随机森林
随机森林就是属于集成学习中的Bagging (bootstrap aggregation)方法, 具有高准确度、抗噪声能力强、性能稳定等优势. 它的基本单元是决策树, 通过训练多个决策树, 生成模型, 然后综合利用多个决策树进行分类, 其输出的类别是由个别树输出的类别的众数而定[13].
其中, hi(x)表 示某一决策树的分类结果, H (x)表示随机森林分类结果, I (·)表示示性函数[14].
2 建筑物提取
2.1 研究区及数据源
本文选取河南省新乡市局部区域作为研究区域,通过 Bigmap下载Google Earth高清卫星遥感正射影像, 研究场景主要是厂区. 影像空间分辨率为0.5 m, 包括红、绿、蓝3波段, 影像中不同建筑物的光谱差异大, 有些建筑物的光谱信息和道路相近, 所以除光谱特征外, 本文结合了形状和纹理等多种特征通过特征优化后进行建筑物提取.
2.2 建筑物提取结果
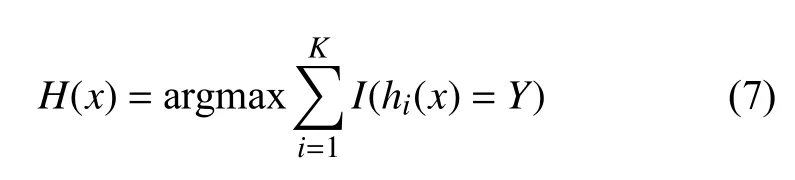
基于13个特征构成最优特征集, 使用随机森林方法进行提取, 然后与决策树、神经网络和支持向量机方法进行比较. 如图10所示, 随机森林的提取效果最好, 能把大部分建筑物提取出来; 神经网络和支持向量机方法会遗漏微小建筑物, 神经网络还会把一些植被误判为建筑物, 精度较低; 由于光谱相近, 决策树方法会把一些道路误判为建筑物, 精度较低.
图10 不同分类器的分类结果
本文是基于特征优化进行建筑物提取, 此外仅用Relief算法和仅用FCBF算法生成13个相应的特征子集, 并且与基于原始特征集、仅用Relief的特征子集和仅FCBF的特征子集使用随机森林的方法进行提取, 与基于Relief和FCBF的最优特征子集进行比较, 结果如图11所示, 基于最优特征子集的建筑物提取效果最好.
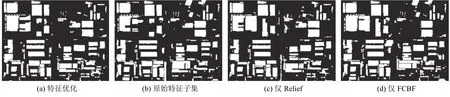
图11 不同特征集的分类结果
本文使用总体分类精度(OA)、F1分数和Kappa系数进行提取精度评定. 由表3和表4可得, 基于特征优化的随机森林方法提取精度最高, 总体分类精度为0.93, Kappa系数为0.91, 比原始特征集提取精度提高了1.07%, 比仅使用Relief算法提取结果精度提高了1.24%, 比仅FCBF算法提高了1.06%. 在不同分类器比较中, 神经网络的精度最低, 随机森林的精度最高.由于影像中有些建筑物被植被遮盖, 提取的建筑物边界不规则, 所以使用最小外接矩形方法优化建筑物边界, 得到优化结果如图12所示, 最终影像提取结果如图12(a)所示.
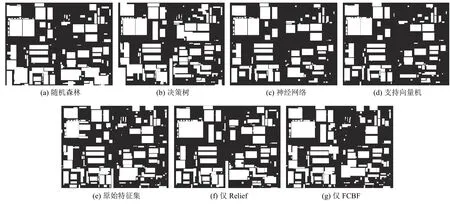
图12 最小外接矩形界优化结果
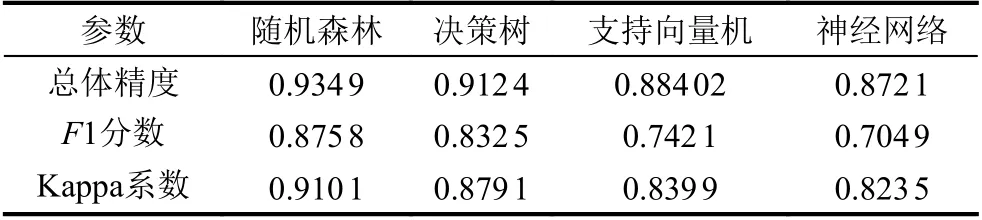
表3 不同分类器的精度评定
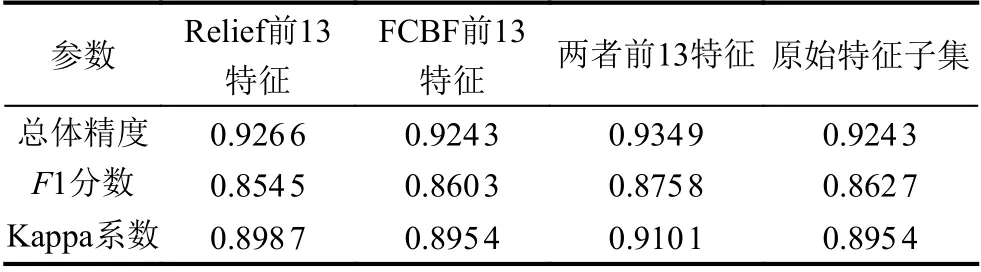
表4 不同特征集提取的精度评定
3 泛化性
为验证特征优化方法的泛化性, 除了厂区范围的正射影像, 本文还研究了居民地范围的倾斜影像. 在影像种类上, 正射影像地物是在一个平面的, 而倾斜影像可以很好地反映地物的真实情况, 具有真实高度; 在影像场景上, 厂区建筑物不规整, 植被遮盖严重, 而居民区建筑物整齐规范, 但存在高度干扰. 因此在影像种类和场景两方面来验证特征优化方法的泛化性和优化性,使用的是空间分辨率为1 m的无人机倾斜摄影影像.
结果如图13和表5所示, 对比不同特征集, 经过Relief和FCBF算法优化的最优特征集提取建筑物效果最好, 效率最高; 由于仅经过Relief算法优化的特征集存在冗余特征, 仅经过FCBF算法优化的特征集存在不相关特征, 提取效果较差精度较低; 而原始特征集中存在过多冗余特征和不相关特征, 因此进行建筑物提取效果最差. 对比不同的分类器, 神经网络方法提取效果最差, 错分较多; 基于最优特征子集的随机森林方法建筑物提取效果最好, 可以正确提取绝大部分建筑物, 错分较少, 总体分类精度为94.46%, Kappa系数为90.98%, 相比于原始特征集分别提高了4.22%、3.48%,相比于Relief算法分别提高了3.4%、3.01%, 相比于FCBF算法分别提高了2.88%、2.52%, 体现了随机森林方法准确度高, 性能稳定的优势以及特征优化方法的优化性与泛化性.
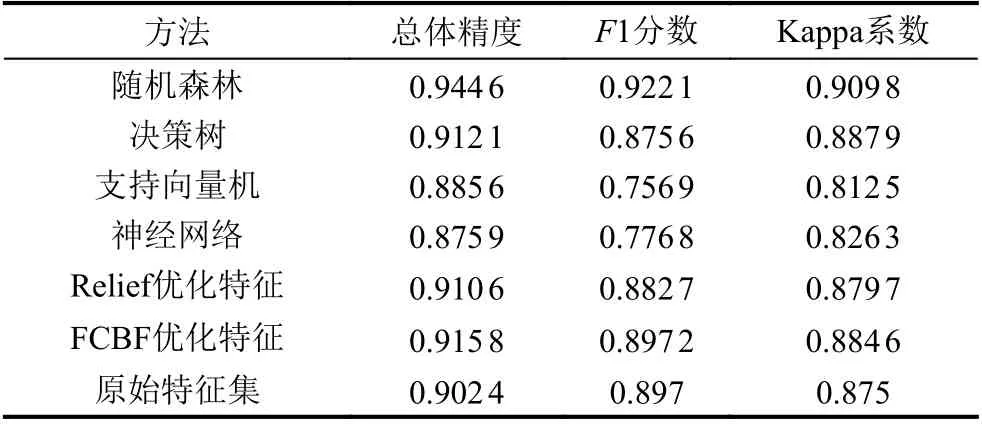
表5 不同方法建筑物提取精度对比
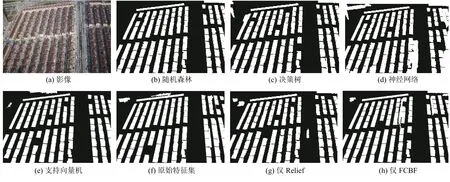
图13 倾斜摄影影像建筑物提取结果对比
4 结论
本文提出了一种基于特征优化和面向对象的建筑物提取方法, 精度比原始特征集和优化特征集有所提高, 而且保证了建筑物的完整度. 在居民地和厂区两种场景以及正射影像和倾斜影像两种类别上进行对比和验证, 体现了方法的优化和泛化性. 但仍存在一些问题,一方面, 本文的Relief算法只适用于目标和背景两类,不适用于多分类, 后续应进行拓展; 另一方面, 目前影像分割并没有成熟的理论基础, 分割精度严重影响了分类精度, 以至于大尺度影像分割效果较差, 最终导致建筑物提取效果差, 后续会深入研究, 使其适应更大区域内的多样建筑物提取.
