基于改进RRT算法的室内火灾动态逃生路径规划
2022-09-19张学锋
张学锋,刘 明
(安徽工业大学 计算机科学与技术学院,安徽 马鞍山 243032)
在智慧楼宇建设时,大型商场、写字楼等室内建筑结构复杂,发生火灾时如何选择最佳的逃生路线是智慧楼宇建设过程中一个重要的研究课题。随着智能消防的发展,在火灾中不仅要求将被困人员疏散出来,而且还要求减少火灾产生的烟雾、高温等火灾致死因素对人员在疏散过程中的伤害。如若有一款能够实时判断火势及火灾相关因素并动态规划出逃生路线的系统,将大大降低火灾逃生疏散的难度,为被困人员带来宝贵的逃生机会。
针对火灾逃生路径规划,目前国内外研究者使用的算法有:A Star算法、蚁群算法、Dijkstar算法等。文中则选用RRT算法,此算法对路径规划时不需要对环境进行具体建模,并且对动态场景有很好的适应性[1],因此,对于文中所需的动态逃生路径规划具有适用性。
在火灾逃生中,对人危害最大的不仅仅是烧伤,由于室内较为封闭的环境,室内火灾产生的火灾产物往往更为致命,比如高温、有毒烟雾等。根据室内火灾火势的变化,可以将火灾分为三个阶段:初起阶段、发展阶段、下降阶段,在不同阶段中火场的烟雾浓度和火势温度也是不同的[2]。该算法模拟根据温度传感器和烟雾传感器的数据来分析火势温度和烟雾浓度等关乎逃生的重要因素,将这些因素通过分区间量化反馈在栅格法构建的地图中,做到快速动态地规划出适宜的逃生路线,为火灾被困人员争取宝贵的逃生机会[3]。
1 火灾因素分析及环境搭建
1.1 影响火灾逃生疏散的因素
文中主要考虑有害气体和高温两种因素,在实际建筑中都装有烟雾警报器和火灾报警器,可以分别反映有害气体是否超标和温度是否超标,为逃生者规划逃生路径从而能够避开这些危险区域,减少人员伤亡。
在单层建筑内发生火灾时,要想安全的逃出建筑不仅仅是找到出口这么简单。经研究发现,火灾中致死率最高的并不是烧伤,而是吸入大量有害气体,火灾中致死率最高的气体是一氧化碳,因此,在逃生中通过烟雾警报器判断火灾烟雾大小是否允许逃生通过显得十分重要。
火场中在燃烧不同可燃物时会释放出不同的有毒气体,这将直接影响逃生者的生命安全,如果逃生人员在不知情的情况下,贸然通过这些有毒气体区域,可能导致当场昏迷。表1[4]列出火场中主要的有毒有害气体,其中火灾可通过浓度将直接影响逃生路径的规划。
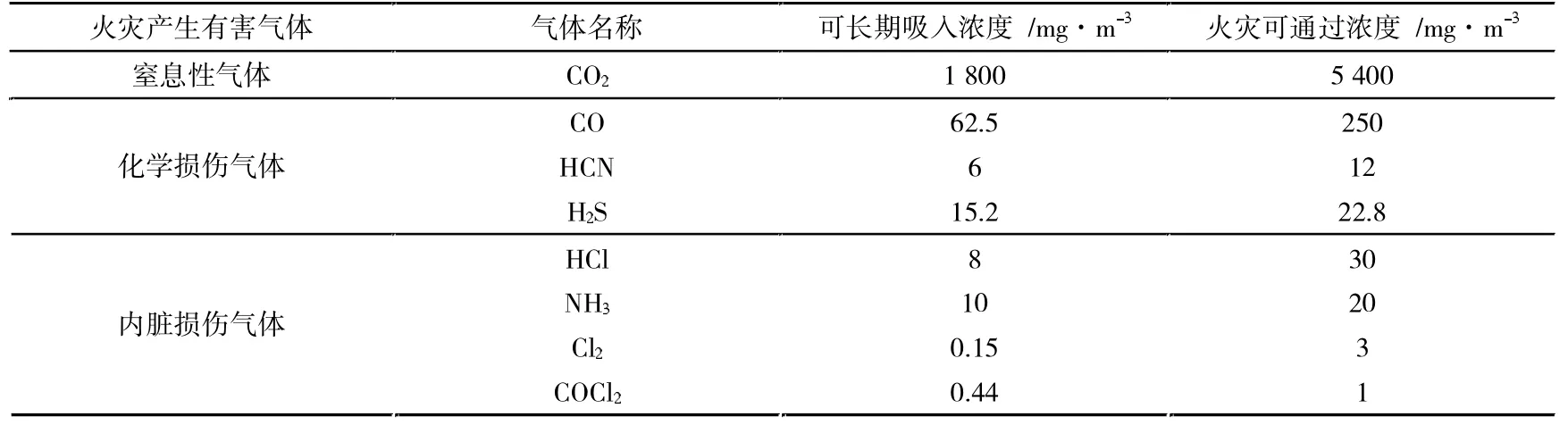
表1 有害气体的可通过浓度
在室内火灾中,特别是一些大型的室内场所由于通风相对不畅和可燃物有限,火势不会一直强烈,随着火势的变化火灾可大致分为初起阶段、发展阶段和下降阶段。通过图1中室内火灾温度变化曲线可以看出,逃生的最佳时期是在A-B点这段火灾初起阶段,火势范围较小,被困人员应抓紧时间逃生;B-G点为火灾发展阶段,大量空气进入,更多的可燃物被点燃,随时可能会产生轰燃现象,这段时间逃生会十分危险;G点之后为下降阶段,温度逐渐降低,如果幸存者仍然安全的话可以继续逃生[5]。
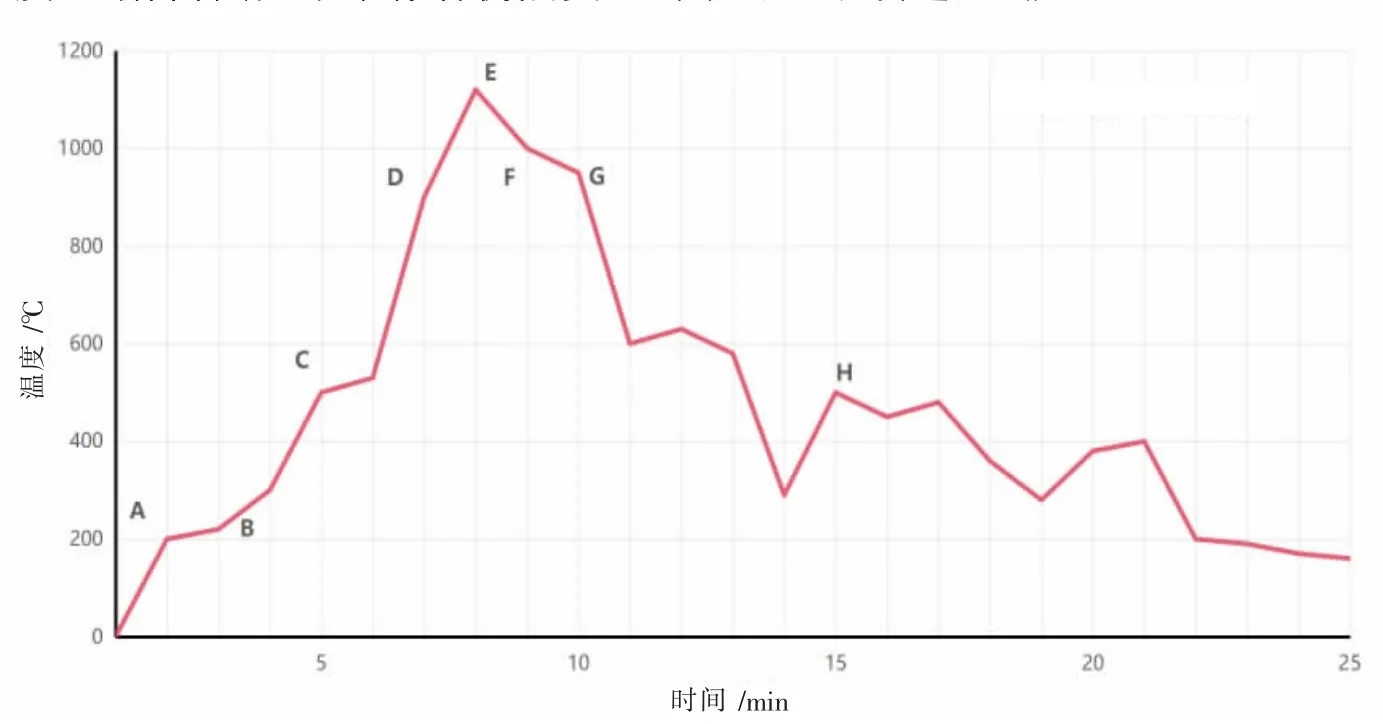
图1 室内火灾温度变化曲线
在火灾初期阶段,温度可以瞬时达到很高的水平,经研究人体虽然在高温下具有一定的耐受时间,但是随着温度指数型增长,留给逃生人员的时间并不多。人体在一定温度范围内可通过性见表2。

表2 区域温度可通过范围
1.2 火灾产物分区间量化
文中改进RRT算法引用一些火灾系数公式,使得该算法更加适用于火灾场景的路径规划,将火灾产物中的烟雾浓度、火势大小(通过环境温度来判断)通过公式进行分区间量化。将火灾产生的烟雾和高温量化后替换为RRT算法中随机树扩展的步长,让改进后的RRT算法更加适用于文中的火灾动态逃生路径规划。
1.2.1 火灾产物影响系数
分别引入火灾现场烟雾浓度、温度对疏散的影响系数fij(ρv),fij(T),从而计算影响被困人员逃生的火灾产物影响系数Mij(t)。

1.2.2几何长度
将任意栅格之间的距离定义为几何长度,记作L(gi,gj)或L(p(xi,yi),p(xj,yj))。L(gi,gj)由以下公式确定

式中,gi,gj分别表示第i和第j个栅格;L(p(xi,yi),p(xj,yj))中p(xi,yi),p(xj,yj)分别表示gi,gj的直角坐标。
1.2.3 当量长度(动态步长)
由于被困人员在逃生过程中需要避开浓烟和高温,所以几何空间上两点最短距离并不总是适合逃生路径。因此,引入当量长度Dij(t),将当量长度作为RRT算法中随机树扩展的最大步长,从而减少碰撞检测的次数,优化RRT算法中随机树扩展的效率,为逃生人员避开烟雾警报器和温度警报器不允许通过的区域,公式如下

式中Mij(t)为t时刻在火场中火灾产物影响系数;Lij为栅格i和j的几何长度。
1.3 改进RRT算法原理
快速扩展随机树(RRT)是在指定的工作环境中,从起始点以节点搜索的方式不断探索到终点的一种路径规划算法,可以应用在完整系统与非完整性系统中,为高维复杂环境的机器人路径规划提供一种新的解决方案[6]。但是传统的RRT在含有大量障碍物或者狭小的工作空间时,该算法的收敛速率会大幅度下降。并且传统的RRT算法具有一定的随机性,使得最终生成的路径并非是最优解[7]。文献[8]提出一种针对狭窄通道的RRT-Connect算法,避免扩展大量无用的节点,与原始RRT-Connect算法相比,有效地提高了路径规划的效率;文献[9]为了增加RRT节点扩展的效率,引入目标偏向和气味扩散的策略,让随机树在生长的过程中更加偏向目标点;文献[10]提出了RP-RRT*算法,引入人工势场算法,并和RRT算法结合;文献[11]提出了改进RRT-Connect算法,在目标点和起始点中间选取一个节点,三个节点同时进行随机树生长,搜寻路径;文献[12]优化了改进RRT算法中随机树生长的方向,让随机树的生长更偏向目标点,增加算法收敛的效率[13]。
文中为了更加适用于火灾逃生的路径规划,创新地引入动态的随机树扩展步长。通过模拟烟雾警报器和温度警报器的数据改变,再使用公式对其进行分区间量化,实现RRT算法中随机树扩展时更新最大步长长度,此改进可以使随机树在扩展时不大于不可通过区域的半径长度,从而减少碰撞检测的次数,提高搜索火灾逃生路径的效率[14]。文中改进RRT算法的扩展方式如图2所示。
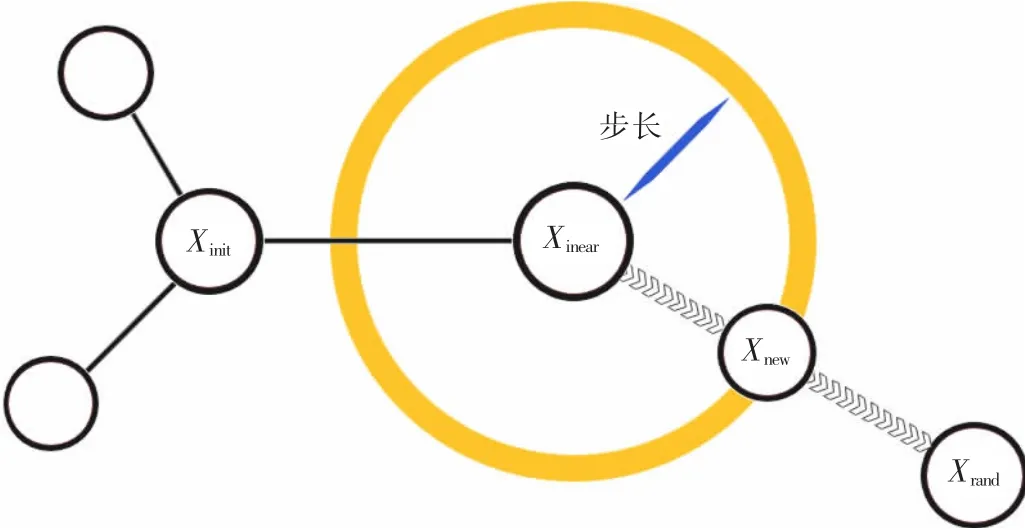
图2 改进RRT算法的扩展方式
在RRT算法中Xnew是由Xnear向Xrand扩展一定步长得到,公式如下

其中,ε为上文模拟出的动态步长,d(Xrand,Xnear)为Xrand和Xnear之间的距离。
文中根据烟雾浓度、火灾的大小因素通过公式(1)进行加权,模拟出在现实火灾发生时,随着烟雾浓度和温度高低来动态改变栅格地图和RRT算法中随机树扩展的最大步长长度,从而实现动态的逃生路径规划。
改进RRT算法完整的迭代搜索方法的流程图,如图3所示。
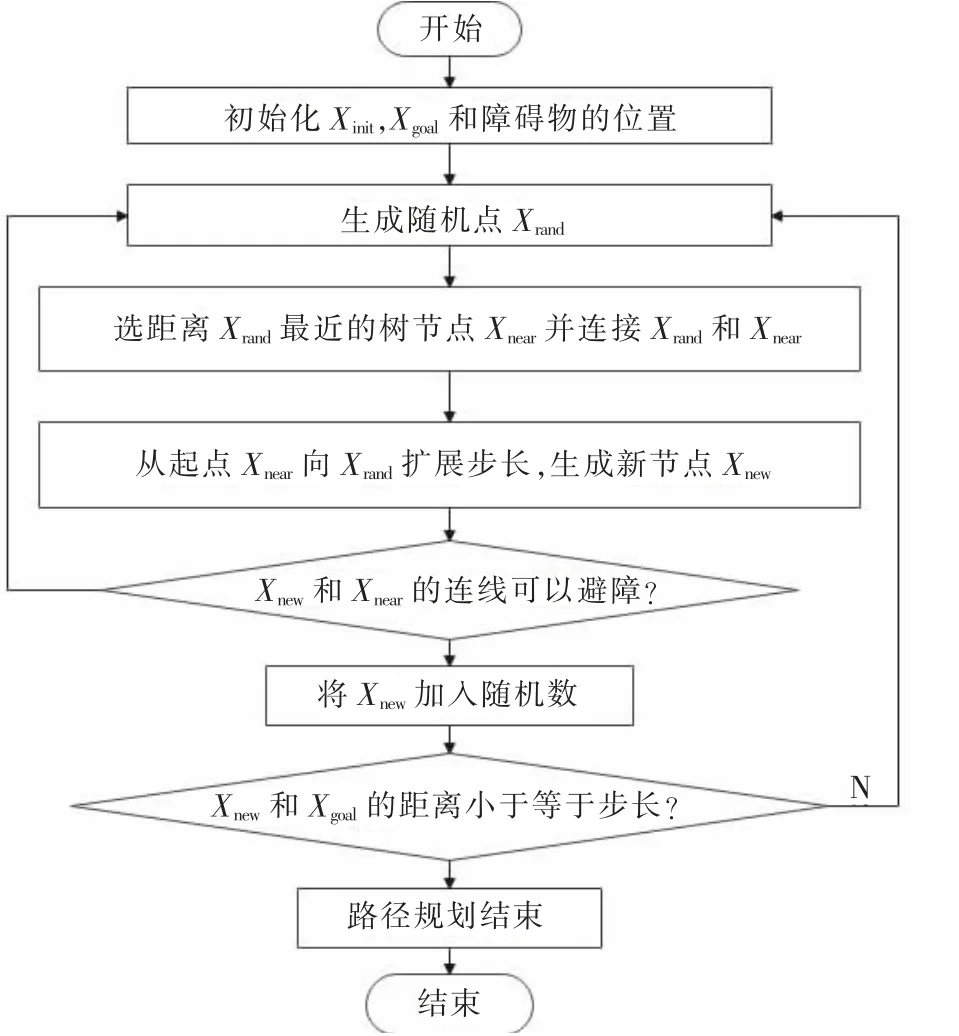
图3 改进RRT算法流程图
1.4 栅格法搭建室内地图
文中以某高校逸夫楼二楼室内平面地图为实验对象,通过栅格法建立该场景的地图,右下角为火灾被困人员,左上角为消防通道出口,如图4所示。
2 改进RRT算法在火灾逃生的应用
2.1 未发生火灾情况下的安全疏散
在未发生火灾情况下,栅格地图中无动态障碍节点,疏散人员只要是绕过静态障碍节点,找到疏散出口即可。通过改进RRT算法运算的结果所示,算法规划的路径和建筑内固定的消防指定的逃生路径基本一致,如图5所示。
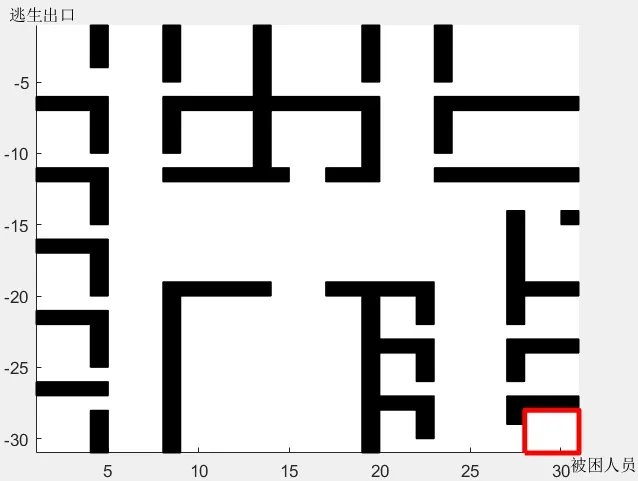
图4 根据实际地图构建的栅格法地图
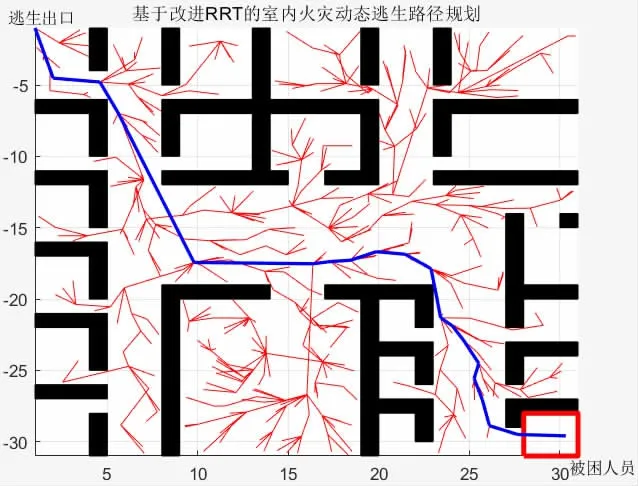
图5 未发生火灾时的逃生路径
2.2 火灾初期的逃生路径规划
火灾初期阶段,随着烟雾警报器和温度警报器的响起,建筑物内的人员应抓紧时间疏散。此时栅格地图立刻模拟传感器的数据确定起火点(如栅格地图右下角第三间房间),添加动态障碍节点,提醒疏散人群避开着火点和烟雾浓度较高的区域[15]。初期阶段火灾产生的烟雾和高温对人群的疏散影响不大,疏散人员根据算法规划的路径跑到左上角消防出口,如图6(a)所示。
2.3 火灾发展阶段的逃生路径规划
火灾发展阶段,随着空气的进入和更多可燃物被点燃,如图6(b)所示,整个房间都被火势和浓烟包围,逃生通道变窄。此时栅格地图模拟传感器数据换算成当量长度,更新逃生地图中的动态障碍节点(如栅格地图右侧)[16]。为逃生者避开火势和浓烟,规划出适宜逃生的路径。
2.4 火灾下降阶段的逃生路径规划
在火势下降阶段,轰燃已经结束,随着室内空气流通不畅和可燃物燃烧殆尽,火势开始下降,此时火灾产生的大量有毒且高温的浓烟最为致命,这时可通过的逃生通道被压缩得越来越窄,栅格地图更新动态障碍节点(如栅格地图右侧)[17],如图6(c)所示。
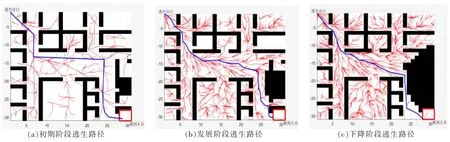
图6 火灾动态逃生路径规划图
2.5 不同阶段火灾逃生路径数据分析
根据火灾三个阶段的逃生路径的数据分析可以得出,在进行火灾逃生路径动态规划的过程中,初期阶段和发展阶段算法运行时间和随机树扩展的节点个数都较少,且每组实验数据的离散程度较低。但随着火势的发展,下降阶段的逃生环境十分苛刻,算法运行时间和随机树扩展的节点个数都有所增加,且每组实验数据的离散程度相较有所升高。对于实验所得的最终逃生路径,初起阶段和发展阶段稳定在52~55 m区间,下降阶段由于逃生环境严苛,导致可通过的区域十分有限,所以最终实验结果稳定在50 m左右,见表3。

表3 动态火灾逃生路径数据分析表
如图7所示,火场中不同阶段的逃生路径,火灾初起阶段和发展阶段路径相对较长,火灾下降阶段由于可通过空间狭小,所得路径相对较短。由图8所示搜索时间和随机树节点个数基本相互对应。可见搜索的时间越长,随机树扩展的节点更多。
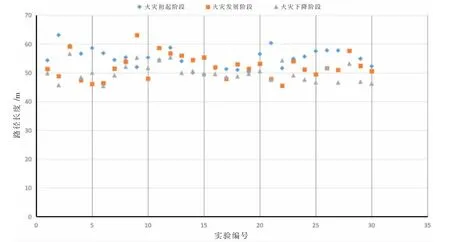
图7 不同阶段逃生路径长度散点图
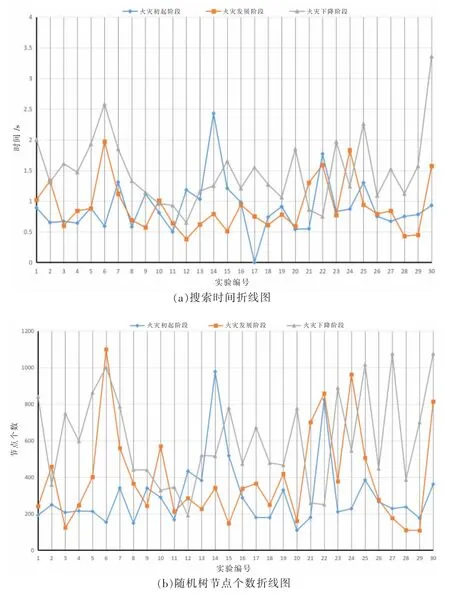
图8 不同阶段实验数据分析
此实验对于在非火灾和火灾三个阶段的情况下,分别进行模拟,实验结果表明,该系统能根据火场中烟雾警报器和温度警报器的数据,分析两种火灾致死因素,达到模拟实时更新火场数据,为火灾逃生人员避开浓烟和高温区域,增加逃生人员的生还概率[18]。
通过对动态环境下的3种情况分析可知,在不同情况下,随着火势的发展,烟雾浓度、温度不断增大,疏散的路径会根据其影响动态改变,可以快速规划出逃生路线,达到智能疏散的目的。研究表明,文中所用的改进RRT算法在某高校逸夫楼二楼动态逃生路径规划中具有良好的使用价值[16]。
3 结语
(1)模拟火灾发生过程中烟雾和温度的变化来进行试验,对于实际的火灾现场,可以根据烟雾警报器和温度检测器的实时数据进行真实的火灾逃生路径规划,达到实时地更新火场情况,让逃生人员避开火灾产物的危险区域,增加火灾生还概率[19]。
(2)随着智慧楼宇的建设,更加智能的火灾逃生系统也必不可少,文中都是基于室内二维的情况下进行模拟,未来可以整个大楼为实验对象,将二维逃生路径规划提升为三维的逃生路径规。让该系统能够在实际的火灾环境下将逃生路径规划得更加合理、人性化,为智慧楼宇提供有价值的高层火灾疏散方案。