智能垃圾分类装置硬件设计
2022-09-19徐联冰苏克显张金亮
吴 栓,徐联冰,苏克显,吴 颖,廖 虎,张金亮
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
0 引 言
随着人们消费需求的变化和科技的发展,日常生活中各种智能化产品应运而生。环保问题一直是人们关注的重点,尤其垃圾分类的问题一直困扰着人们,并且目前面临的最大问题是人们对于垃圾的具体分类不太清晰。通过对生活垃圾进行智能分类可以极大程度地帮助人们减轻负担来提高生活质量,支持国家的可持续发展战略,实现资源的再利用,促进节能减排。智能垃圾桶的核心在于实现垃圾的自动分类,使用者只需要将垃圾丢进垃圾桶,就能对垃圾进行自动识别和分类。
本文结合实际的应用需求,设计了一款智能垃圾分类装置。该智能垃圾桶以英伟达Jetson Nano人工智能平台作为数据核心处理模块,基于BP神经网络算法对垃圾图像进行识别和分类来获取垃圾信息;然后通过机械部分对垃圾进行分类,并将结果进行显示以及语言提醒;最后通过组装和软硬件联合调试,验证系统的整体功能。
1 系统总体设计
根据实际的应用需求,对系统功能进行全面分析,系统的总体结构主要由电控部分和机械部分两大块构成,总体架构设计如图1所示。其中电控部分包括:数据融合处理模块、图像处理与摄像头模块、无线通信模块、智能音视频显示与提醒模块、电源及动力模块和执行机构控制模块。机械部分包括:垃圾桶箱体机械结构和箱体内的齿轮传动机构。
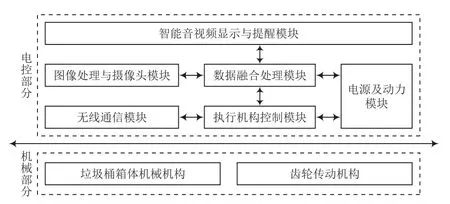
图1 系统总体架构
系统的总体工作流程如下:
(1)电源及动力模块为整个系统的电控及动力执行机构提供稳定的电压输出。
(2)图像处理与摄像头模块可以实时采集当前垃圾投放口的图像信息。
(3)数据融合处理模块通过软件算法对采集的垃圾图像进行识别,并确定分类。
(4)执行机构控制模块则根据数据融合处理模块分类的结构控制步进电机,驱动齿轮传动机构,将垃圾投入正确的分类池中。
(5)智能音视频显示与提醒模块循环播放垃圾分类宣传片,同时对垃圾分类识别的结果进行显示和播报。
(6)无线通信模块用于与上位机进行通信,查看系统的状态信息,便于调试。
2 系统详细设计
基于总体方案,从电控和机械两个部分进一步对系统的主要模块进行详细设计。
2.1 电控部分设计
2.1.1 电源及动力模块
电源及动力模块主要包括稳压模块和驱动电机,其中电源稳压模块为系统其他模块的工作平稳有序进行提供条件。根据系统主控和其他功能模块芯片对供电特性的要求,本系统设计了3种不同的电压等级:12 V、5 V和3.3 V。综合考虑系统的可移动和方便拆卸等特性,系统12 V电压则直接采用12 V/8 000 mA的锂电池进行供电,该电池功率大、转换效率高、充电快,能较好地满足整个系统的供电需求。
驱动电机采用86系列的步进电机86BYG250C,额定电流为5.6 A,持续输出力矩6 Nm,完全满足垃圾投放池转动所需的转矩和功率要求。此外,该电机步进角为1.8°,通过机械设计齿轮传动减速比为1∶10,能实现更高精度的旋转位置控制。
2.1.2 数据融合处理模块
系统数据融合处理模块主要用来运行人工智能算法,实现垃圾图像的识别和分类。该模块基于NVIDIA(英伟达)高性能Jetson Nano人工智能运算平台进行实现,该平台采用四核64位ARM CPU和128核集成NVIDIA GPU,可提供472 GFLOPS的计算性能;它还包括4 GB LPDDR4存储器,采用高效、低功耗封装,具有5 W / 10 W功率模式和5 V-DC输入,平台实物如图2所示。

图2 英伟达Jetson Nano人工智能平台
平台支持NVIDIA CUDA Toolkit 10.0以及cuDNN 7.3和TensorRT等库。该SDK包括主流的开源机器学习(ML)框架(TensorFlow、PyTorch、Caffe、Keras和 MXNet等)以及计算机视觉和机器人开发的框架(OpenCV和ROS等)。
2.1.3 执行机构控制模块
执行机构控制模块用于与数据融合处理模块交互,并控制步进电机驱动传动机构。该模块采用意法半导体公司生产的32位处理器STM32F103ZET6为主控芯片,主频高达72 MHz,内置高达512 KB的高速闪存,具有丰富的I/O端口和各类标准的通信接口,实时性能够很好地满足数据交互和电机驱动控制的要求。基于该主控芯片设计电路原理如图3所示。其中串口1的RXD1和TXD1与无线通信模块中的蓝牙模块对应的管脚相连,实现与上位机的数据交互。电机驱动器采用TB6600,因此主控芯片与驱动器电路连接方式设计为:PA0接PUL+,PA2接DIR+,PA3接EAN+,GND接EAN-,从而控制电机的转速和旋转方向。

图3 执行机构控制模块电路
2.2 机械部分设计
机械部分包括桶箱体机械结构和箱体内的齿轮传动机构。箱体作为整个装置的“躯体”部分,主要包括整体材质、外观、尺寸以及垃圾投放口尺寸、滑道坡度和位置、内部垃圾投放池的尺寸等。利用SolidWorks绘图工具对机械部分进行设计,箱体及齿轮传动部分的三维结构如图4和图5所示。
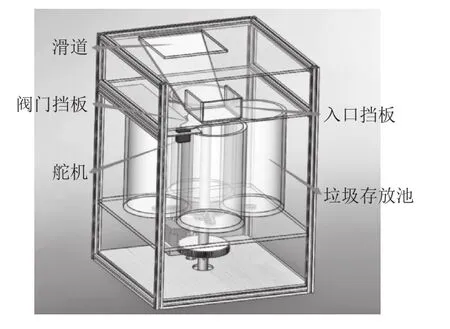
图4 垃圾桶整体机械结构
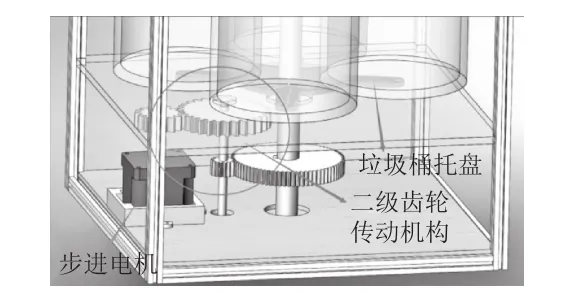
图5 垃圾桶齿轮传动部分的机械结构
通过实地调研和文献查阅,结合功能的要求,箱体整体外观按照长方体进行设计,材质以不锈钢和亚克力板为主构成。投放口位于整个箱体的顶部,滑道位于投放口的正下方,侧边的平台用于安装电控部分的各类模块。根据当前国内城市生活垃圾分类通用标准,将日常生活垃圾归属为四大类,故本垃圾分类装置设计过程按照四个投放池的规格来构建。
齿轮传动机构由步进电机驱动,受箱体结构和尺寸的限制,为同时满足负载转矩和控制精度的需求,设计三轴两级级联齿轮传动结构,中心主轴与四个投放池下方的旋转平台直连,通过中间过渡轴的两个不同大小的齿轮与步进电机旋转轴的齿轮级联,从而实现整个垃圾分类装置的旋转分类投放。
3 系统测试
根据前述章节对电控和机械部分的详细设计,定制相关的硬件材料进行组装,组装完毕后对硬件进行逐步调试。测试主要内容和结果见表1所列。硬件测试完毕后,进行软件算法实现,通过软硬件联合调试,逐步实现系统的各项功能。基于高性能的人工智能平台,系统通过神经网络能够对垃圾图像进行快速识别,与执行机构控制模块联动准确实现垃圾的分类投放。经过多次实验发现,系统响应速度快且具有较高的准确率。
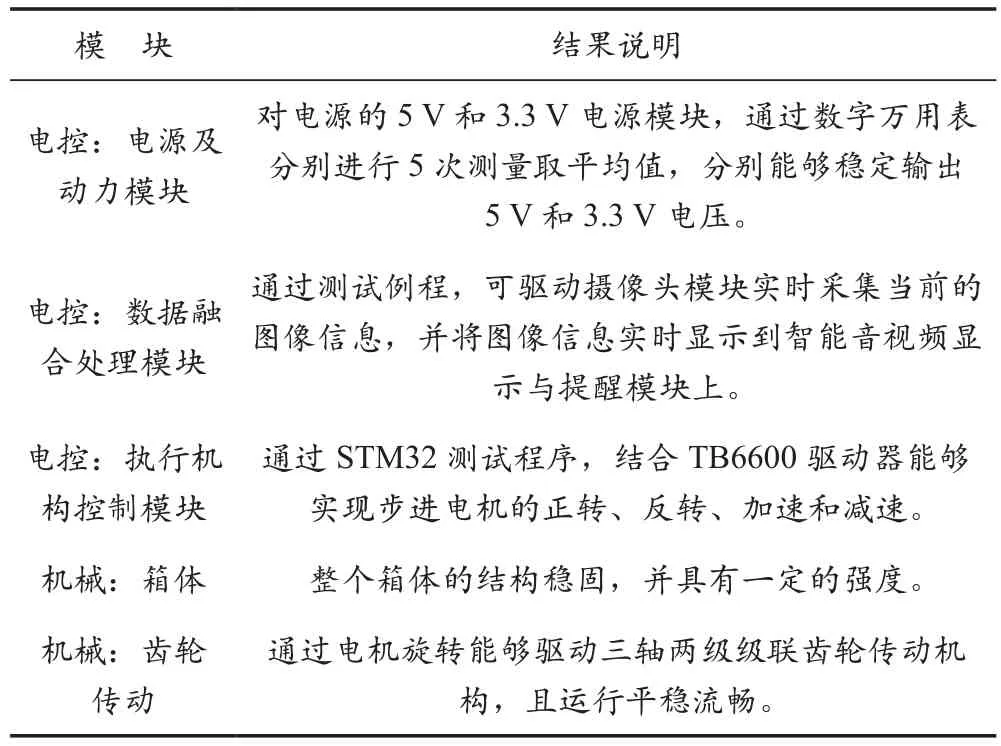
表1 硬件测试结果
4 结 语
为进一步将垃圾分类落到实处,本文综合运用人工智能、图像处理、智能控制等技术设计了一种智能垃圾分类装置。主要对系统的电控和机械结构方面进行了详细的设计,经过实物安装、调试、测试和验证,证明系统的实时性和准确率均能够达到预期效果。然而,由于各方面条件的限制,在同时投放多个垃圾或者不同光照等较为复杂场景下,系统的识别和分类结果较差。后续将进一步结合物联网、云计算等新技术和平台进行研究与改进。
