水面自组网技术在九龙江口泥沙沉积分析中的应用
2022-09-19曹泽祥徐轶群
曹泽祥,徐轶群,2
(1.集美大学 轮机工程学院,福建 厦门 361021;2.福建省船舶与海洋工程重点实验室,福建 厦门 361021)
0 引 言
海洋数据包罗万千,其背后隐藏了极为丰富的有效信息,但由于对海量海洋数据的采集和分析手段较少,人们很难准确地获取隐藏信息和规律。当下迫切需求一种低成本、高精度、覆盖领域广的组网和监测方法来采集并分析海量海洋数据。近年来,随着我国构建海洋命运共同体等海洋强国战略的实施,海洋监测技术在海洋领域逐渐得到广泛的应用。
吴迪等人利用新型半潜式无人艇进行海洋环境监测,通信方式采用全球定位系统以及北斗卫星导航系统的组合系统,利用电子罗盘提供高精度位置和艏向信息。李凉海等人采用SAR卫星的组网观测使海上动态目标遥感跟踪监测成为可能,实现了船只从传统的单星检测到跟踪的跨越。耿铭晨等人采用将ZigBee通信与GPRS相结合的技术方法,构建了基于无线传感器网络的海洋环境监测系统。高诗尧等人基于BDS开发应用于海域环境监测浮标的定位通信装置。杨军平等人利用基于北斗卫星导航系统的海洋环境监测系统对海洋环境进行监测。陈洪滨等人借助一种基于太阳能无人艇构建的新型高智能化海上气象水文观测系统进行天气和海洋环境预报。陈慧蓉等人采用基于GIS的船载海洋生态环境监测系统对海洋生态环境进行监测。张娜等人采用ZigBee技术搭建水质监测服务平台,将监测数据通过ZigBee传输到主机,使用手机APP或Web远程监控每台设备的数据。
为了有效实现海域水动力数据可视化及小尺度海域环境监测,本文应用窄带物联网技术,在一定海域内构建基于LoRa通信方式的水面无线自组网络。为了验证本文方法的有效性,以九龙江口海域为研究区域,建立水动力学仿真模型;并在九龙江海域投放大量可随潮流运动的带北斗定位功能的微型浮标,对海域水面水动力学参数进行采集,最后对仿真数据与试验数据进行处理和分析模拟。
1 水面自组网架构简述分析
系统基于窄带物联网技术建立水面快速自组网,该网络是在Ad-hoc网络、无线传感网络、无线Mesh网络的基础上利用自组网特性结合水面的复杂环境、多样的数据构成。构成自组网的硬件采用多种适应水面数据采集、转发、传输的设备。水面快速自组网无线通信采用低频段系列,以420~450 MHz为标准参考频段。可通过调节扩频因子、错频因子等来调节通道。本文采用的是433 MHz频段。
如图1所示,水面快速自组网包括低频自组局域网和广域网。其中低频自组局域网是由岸基基站、船载基站、微型浮标、无人机便携式基站构成,通过数据传输的算法和规则实现数据的有效采集和传输。广域网由卫星网络、GPRS、有线网络组成,与低频自组局域网形成综合性组网,实现数据在相应海域环境下无死角覆盖地实时传输。
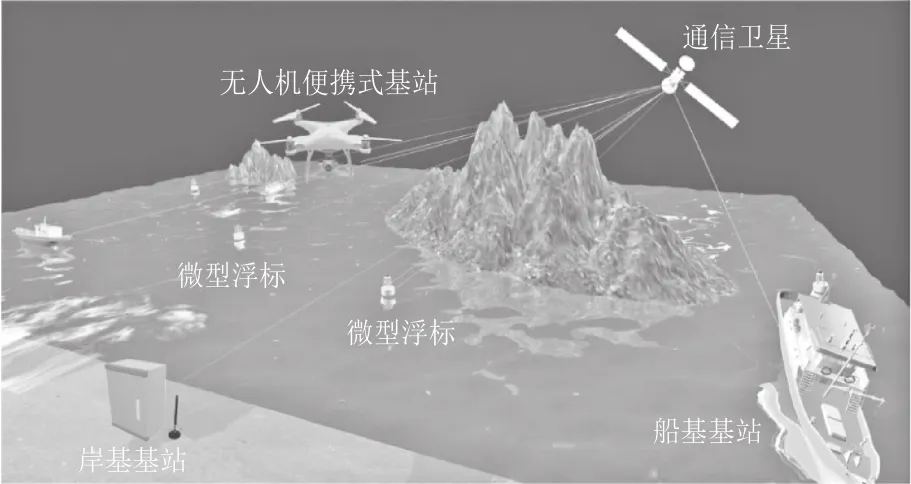
图1 组网模拟图
系统整体架构可分为传感层、通信层、应用层三个层面,如图2所示。
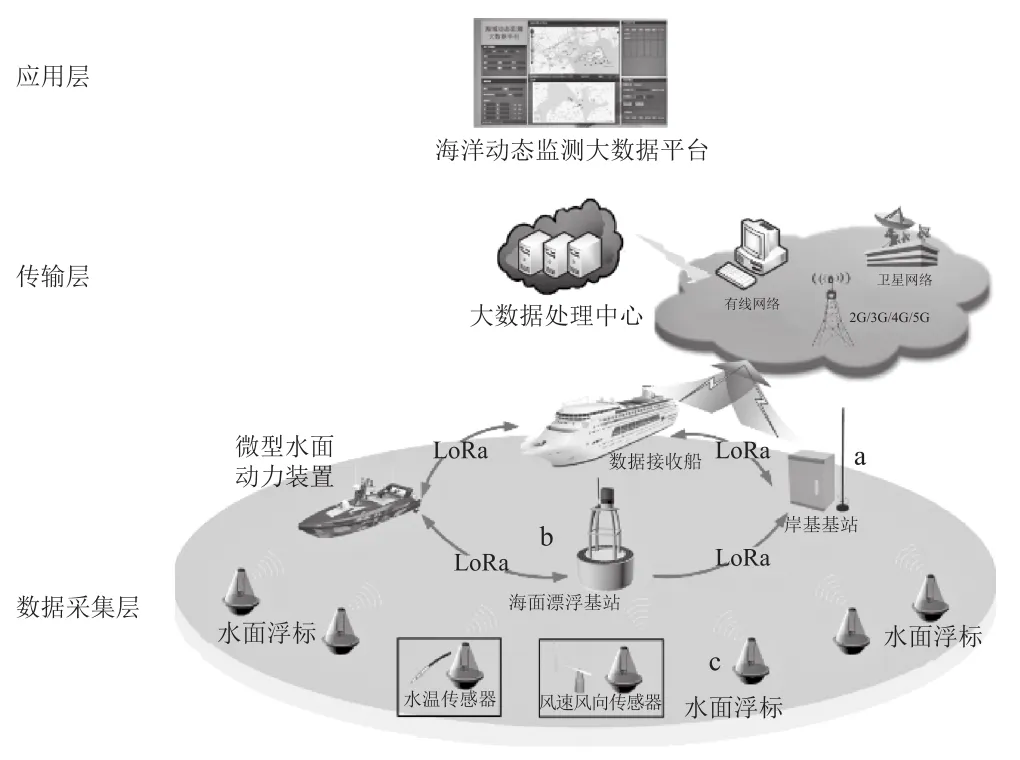
图2 水面自组网架构
传感层:由微型浮标、船基基站、岸基基站、无人机便携式基站组成。微型浮标可携带不同传感器,包括温度、PH值、盐度、溶氧量等传感器,可以采集海洋数据,并将数据传输到船基基站、岸基基站以及无人机便携式基站。
通信层:主体由LoRa自组网构成,通过基站、采集网关等数据采集装置采集传感层的传感数据,并通过最优路径上传数据。由LoRa自组网传输的数据最终通过公共网(卫星网络、以太网络、GPRS网络等)将数据传输到服务器。通过水面自组网络相关设备达到数据在海洋、陆地、天空无缝链接,并实现自动、快速、高效的LoRa自组网以及卫星网络的综合性组网。
应用层:本文使用的自组网系统可以应用到海洋漂浮垃圾监测、溢油监测等方面。
2 水动力学模拟仿真及试验
为了使海洋数据采集试验更科学,首先对厦门岛海域进行海洋水动力仿真建模,在仿真模型的基础上开展海洋数据采集试验。
2.1 海洋水动力学仿真建模
本文基于区域海洋动力模式ROMS(Regional Ocean Modeling System)对测试海域进行模拟仿真。
ROMS模式可以与大气模式等进行耦合计算,也可以单独进行海洋模式计算。它是一个自由海面、三维以及在地形的基础上跟随坐标的非线性斜压原始方程模式,在水平方向使用曲线的Arakawa C网格,垂直方位采用跟随地形、可伸缩的S坐标系统,它的独特之处在于能够根据研究的需求采用不同的坐标来转换函数以及拉伸函数最终实现垂向加密。
ROMS能够提供多种原始方程中各项的离散方案、多种水平扩散和垂向混合方案以及边界处理方案,这得益于其基于模块化设计,它能够与多种模块耦合,例如大气、生态、海浪以及沉积物运输等,这使它能够满足不同研究的需要。ROMS模式的构造原理如下。
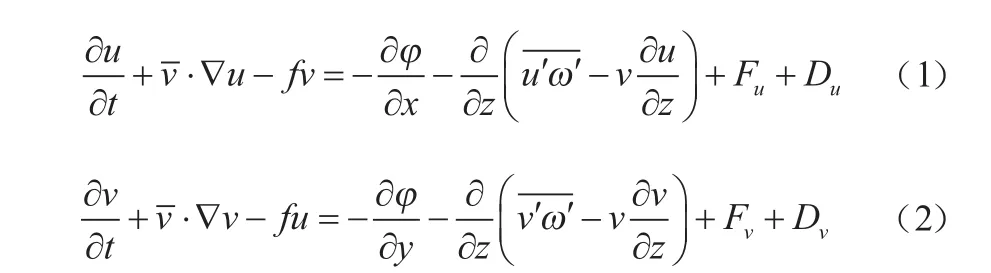
笛卡尔坐标系下的原始方程为:
平流扩散方程控制标准浓度场(,,,)(盐度、温度等)随时间变化的方程为:

状态方程为:

在浮力垂直动量方程中考虑到密度变化,在静水近似中假设垂直压力梯度平衡浮力为:

其中:=(,,)代表流速向量;代表水的局部密度;代表海水温度;代表海水盐度;代表海水压力;ρ代表海水的参考密度;代表科氏参数;代表重力加速度;代表动力压力;(D,D,D)代表对应变量的耗散项;(F,F,F)代表施加的强迫项。
不可压缩流体的连续方程为:

则垂直边界条件的顶部边界条件为:

热力学边界条件为:


其中:K、K分别代表温度和盐度的扩散系数;Q代表海表面热通量;-代表淡水通量;代表海面参考温度;Q代表海面温度的函数。
海表面垂向运动的边界条件为:

垂直边界条件的底部边界条件如下。
动力学边界条件为:
热力学边界条件为:
海底垂向运动的边界条件为:

ROMS模型存在多种边界条件,包括开边界条件、闭合边界条件、定期边界条件等。设置边界条件需要提供边界条件点的值,既可使用解析表达式计算,又可直解。
本文中模型区域包括117.90~118.20°E、24.35~24.65°N。模型的水平网格分辨率为200 m,垂向分为10层。
模型的开边界驱动方式以8个主要分潮(M2,S2,N2,K2,K1,O1,P1,Q1)的潮流进行,其中各分潮的调和数据采用Oregon大学OTPS模式下的潮汐调和常数。
由于厦门湾的水深较浅,水体性质呈现垂向均匀,因此采用ROMS中的二维模块进行模拟,将问题简化为二维的浅水模式,其控制方程组如下。
(1)垂向平均的动量方程组为:
(2)垂向平均的连续性方程为:

其中:、为和方向的垂向平均流速分量;=+,为水位,为平均水深,为总水深;为科氏参数;A为水平方位的涡动粘滞系数;τ=-||为底部摩擦应力,为摩擦系数。
2.2 九龙江口泥沙沉积追踪测试
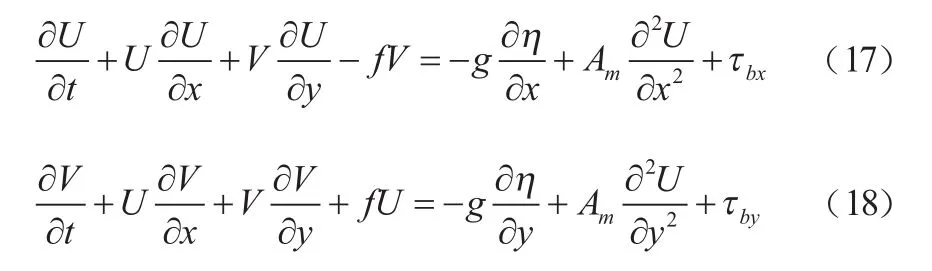
在厦门湾九龙江口有大量漂浮垃圾流向鼓浪屿海域,这也反映出了九龙江口泥沙的流向。为了继续追踪九龙江口泥沙流动轨迹,选择在临近鼓浪屿的海沧大桥下投放微型浮标。配置2个岸基基站,分别放置于厦门象屿五金机电物流中心附近,坐标为(118.10°E,24.54°N);厦门杏东公园附近,坐标为(118.05°E,24.56°N)。微型浮标的投放位置位于厦门海沧大桥附近,如图3所示。
图3 九龙江口泥沙沉积追踪测试
2.3 分析
在仿真模型的基础上进行海洋数据采集试验,试验过程中发现,在海沧大桥附近投放微型浮标后,涨潮过程中微型浮标随海流漂浮,途经红屿和宝珠岛,至杏林高浦村海域后大部分浮标速度趋于0 m/s并停滞于此,小部分浮标伴随退潮折返,说明此处水流速度变慢,泥沙随即沉积。根据卫星图像显示,发现在杏林高浦村附近海域滩头较高,有大量泥沙沉积,这说明来自九龙江口的海水携带大量泥沙随着潮流运动,沉积于杏林高浦村附近海域,这与测试结果所反映的情况比较吻合。
3 结 语
本文应用窄带物联网技术,选用433 MHz频段,构建一定海域的无线水面快速自组网络,该网络是在Ad-hoc网络、无线传感网络、无线Mesh网络的基础上利用自组网特性结合水面的复杂环境、多样的数据构成,硬件采用多种适应水面数据采集、转发、传输的设备,以此实现海洋环境的智能监测。通过在九龙江口海域投放微型浮标,大量采集海洋数据,并将数据可视化,与模拟仿真相结合,可以得到该海域精细化水动力学模型。试验结果表明,利用无线水面自组网采集海域水动力学参数的方法是有效的,该方法组网速度快、可靠性强、覆盖范围广,能够实现数据在一定尺度的海洋环境下无死角最优路径传输,最终实现海洋数据经济有效地实时共享,对于海洋环境监测和海洋资源的开发利用具有应用价值。
