顶石:月球门户空间站的探路者
2022-09-17董佳伟
文/董佳伟
北京时间6月28日17时55分52秒,美国火箭实验室的电子号火箭托举光子上面级和顶石月球探测器成功从新西兰玛西亚半岛LC-1B发射台起飞。顶石月球探测器任务是美国宇航局月球门户空间站在月球近直线晕轨道(NRHO)开展任务的探路先锋,将探索长期在月球NRHO 轨道运行和月球自主导航定位。顶石月球探测器为12U 立方星(20厘米×20厘米×34.05厘米),体积接近家用微波炉, 重约25千克。

▲ “电子号”尾焰
成功发射
顶石月球探测器全称为“月地自主定位系统技术操作与导航实验”(Cislunar Autonomous Positioning System Technology Operations and Navigation Experiment,简称 CAPSTONE,译为“顶石”)。发射9分钟后,光子上面级和顶石月球探测器组合体成功和火箭二级分离,进入高度165千米、倾角39.1°的近地停泊轨道。在随后的5天里,光子上面级搭载的超居里发动机通过多次点火,逐步抬升组合体的远地点高度至7万千米。发射后第六天,超居里发动机最后一次在近地点点火,将组合体加速至 10.97千米/秒从而达到地球轨道逃逸速度并踏上奔月之旅。最后一次组合体点火后 20 分钟,顶石月探测器将从光子上面级顶部分离,独自踏上前往月球的低能量转移轨道(也称弹道式地月转移轨道)。途中顶石月球探测器将打开自带发动机进行数次中途轨道修正确保探测器最终在2022年11月顺利抵达月球NRHO轨道。
新模式的探索
为了应对快速增长的地月空间政府或商业探测任务造成的地月系“交通堵塞”,除了轨道和操作方面的验证,“顶石”任务同时需要验证先进空间(Advanced Space)公司为美国宇航局研制的月地自主定位系统CAPS。该系统不依靠地面对环月轨道飞行器进行轨道测算,而是在月球轨道利用探测器进行自主定位和导航。
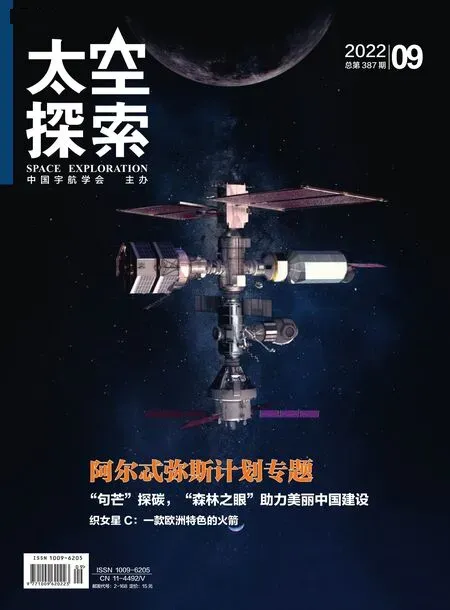
▲ 采用弹道式地月转移轨道的顶石探测器最远距离地球约150万千米,将在发射后进行多次中途轨道修正(TCM),TCM的时间将依据实际飞行需求做调整而发生变化,预计2022年11月13日抵达环月轨道

▲ 北京时间 2022 年6月28日,电子号火箭从新西兰玛西亚半岛成功发射顶石月球探测器
通过多家商业公司和美国宇航局旗下相关研发中心的合作,“顶石”任务代表的不仅仅是美国宇航局载人重返月球阿尔忒弥斯计划的开始,也开启了一种最大化综合利用商用和政府资源的新模式,这一快速执行的小成本技术验证任务在传统的美国宇航局深空探测任务里并不多见。该局于2019年和美国科罗拉多州先进空间公司签署价值 1370万美元合同,该公司依据合同开发立方星,为月球门户空间站未来使用的环月NRHO轨道进行飞行验证。
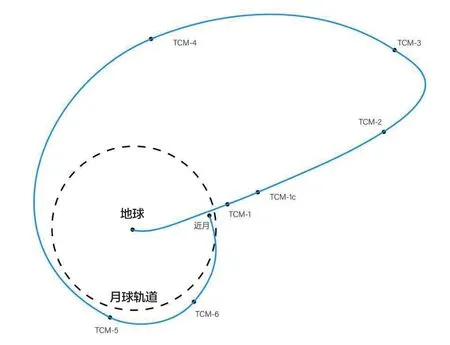
顶石探测器展太阳翼展开模式(上)和太阳翼折叠模式(下)
“顶石”的任务目标
验证NRHO轨道的可行性和地月系统高度动态操作
首个任务目标集中在消除在NRHO轨道绕月的不确定性技术屏障和展现NRHO轨道特性带来的益处。这包括展示导航能力和验证长期在NRHO 轨道稳定运行的能力。这个任务积累的操作经验将直接支持未来的航天器在这个独特的环月轨道稳定运行。月球NRHO轨道处在地月引力平衡点附近,具有较高的轨道稳定性,需要极小的轨道维持,是长期月球环绕器的理想轨道,因而被美国宇航局选为月球门户空间站的轨道。
为未来月球探测积累经验和扫清障碍
“顶石”任务的第二个任务目标集中在建立在复杂环月轨道探测的运行和管理经验,这将有效支持未来包括载人登月在内的月球探测任务,降低任务风险并大大提高成功率。这其中包括逐步建立的商业月球服务实施能力的建立,如商业月球探测平台和火箭发射能力。这一目标旨在展示美国宇航局和相关产业快速并经济地实施月球探测的航天工业能力。
展示和加速建立月地自主定位系统CAPS
这一任务目标主要集中在在轨验证月球自主定位系统CAPS。为了实现这一目标,美国宇航局戈达德空间飞行中心和先进空间公司将联手,顶石月球探测器将利用目前正在近月轨道运行的月球勘察轨道器进行环月轨道自主定位,并据此收集的数据来提高自主定位系统CAPS 软件的技术准备成熟度,从而加速CAPS的成熟速度并尽快应用在未来的探月任务中。
任务规划轨道
顶石月球探测器使用的是弹道式月球转移轨道,而不是常用的霍曼转移轨道。弹道式地月转移轨道是一种低能量地月转移轨道,它利用地球、月球和太阳三者对探测器的引力来降低燃料的消耗,发射后需要极小的能量消耗就能抵达其他行星或者卫星,被目标星体捕获时几乎不需要能量减速。为了实现月球弹道式捕获,探测器发射后的最远距离将远高于月球环绕地球的轨道,在那里,太阳对探测器的引力将起到主导作用,探测器的绕地轨道近地点将被太阳引力抬升至接近月球环绕地球的轨道,从而在回落时,不需要消耗大量燃料就可以进入环月轨道。中途需要进行小幅轨道修正,小推力发动机如离子电推进发动机就可完成。
首篇阐述用于探测器的弹道式捕获理论的相关论文于1987年发表。1990年1月24日,日 本 首 个 月 球探测器飞天号未能按计划进入远地点 47.6万千米的大椭圆轨道,只达到了29万千米。美国加州理工大学喷气动力实验室的爱德华·贝尔布鲁诺和詹姆斯·米勒听说后设计了一条低能转移弹道式捕获奔月轨道,并于同年6月21日提供给了日本宇宙航空研究开发机构,被后者欣然接受并最终采纳。
贝尔布鲁诺和米勒提出的轨控方案基于弱稳定边界理论,只需要探测器自身少量的轨道修正就可以达到变轨并最终进入月球轨道的目的。到了1991年10月2日,“飞天号”采用弹道式转移轨道正式进入了月球轨道,并最终于1993年4月10日完成探测任务之后在地面飞控的指挥下,受控撞击月球表面。相比于霍曼转移轨道,弹道式月球转移轨道需要花费更长的时间,顶石月球探测器将在发射后4个月抵达月球,而通过霍曼转移轨道前往月球只需要三四天。但是弹道式月球转移轨道将减少推进剂的消耗,省下的推进剂可以用于提升载荷的质量,探测器载荷能力可以提高10%~15%。
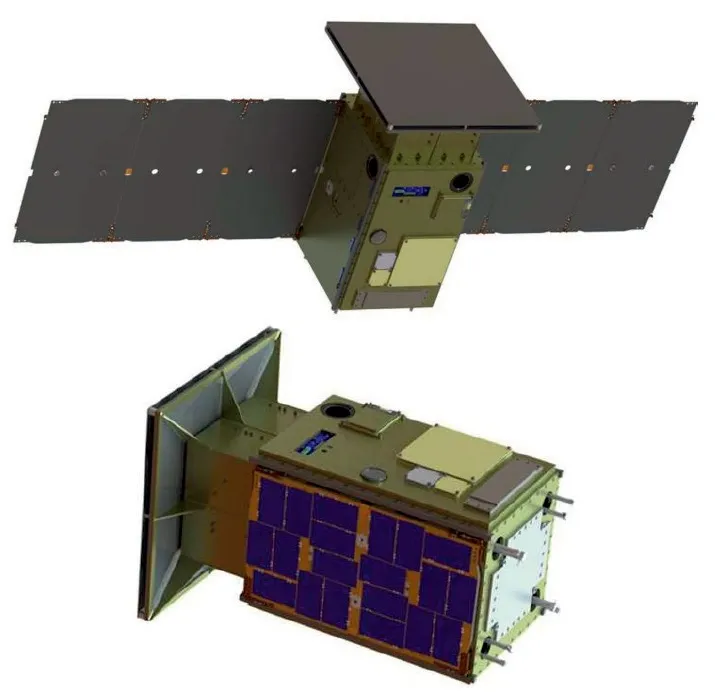
▲ 2015年NRHO环月轨道模拟。左侧为轨迹在地球为中心的太阳-地球旋转参考系的轨迹,右侧为以月球为中心的地球-月球旋转参考系的轨迹
有惊无险的通讯故障
7月4日,发射后第六天,无线电爱好者通过美国宇航局联系探测器的深空探测网络(DSN)网站发现,顶石月球探测器停止了通过 DSN 下行信号和数据,同时位于全球三个地方的该局深空探测网络开始利用大型深空天线轮流向探测器发射上行信号。7月5日,美国宇航局承认探测器暂时失去了联系,DSN 没能接收到顶石探测器的下行信号。7月 6日21时26分,先进空间公司的任务飞控团队成功和顶石探测器再次建立了通讯联系。7月7日,美国宇航局发布了通讯故障原因。
地面飞控团队于7月4日对分离后的顶石探测器进行设置和检查时发现遥测数据出现偏差并试图调查原因,在试图获取无线电通讯系统的诊断信息时,地面人员发送了格式错误的指令,导致无线电意外关闭。通常情况下,由于无线电是探测器和地面联系的唯一通道,探测器的自我检测系统在发现无线电关闭时会按照设计立即自动重启无线电,但是顶石探测器自检系统没能立即重启无线电,存在设计缺陷。几天之后,探测器飞控系统终于绕开这个缺陷,自主打开无线电重新联系了地面。在关闭无线电的两天时间里,顶石探测器自主保持了天线对准地球、保持太阳翼不断给电池充电,同时自主使用发动机消除了反应轮积攒的动量。反应轮是探测器内部的转轮,通过旋转来控制探测器的姿态。
作为首个进入月球NRHO轨道的探测器,抵达月球之后的顶石探测器,将直接进入一个近月点在月球北极上方3000千米,远月点在月球南极上方7万千米,周期7个地球日的 NRHO 轨道,并计划在轨开展轨道维持以及利用近月轨道上的月球勘察轨道器进行月球自主导航定位试验。近直线意味着轨道的部分分段相对于大椭圆轨道具有更大曲率,而在别的分段又有更小的曲率。顶石探测器计划在月球NRHO轨道工作半年。其后工作如何,让我们拭目以待。