双重视角下的无人集群智能性描述与等级划分
2022-09-16武文亮拓明福周兴社
武文亮,沈 博,拓明福,周兴社
(1.西北工业大学 计算机学院,陕西 西安 710129;2.空军工程大学 装备管理与无人机工程学院,陕西 西安 710051)
0 引 言
无人集群是指由一定数量的单功能和多功能、智能和非智能无人装备共同组成,以交感网络为基础,整体具有能力涌现和行为可测、可控以及可用特点的无人系统[1]。按照作战域不同,可划分为空中、地面、水面、水下等单域作战无人集群及空地、空海、海陆空等跨域协同作战无人集群[2]。该概念一经提出便吸引了国内外各研究机构的高度关注,现已成为无人系统的一个重要发展方向。与无人单体相比,其具有功能可组合、易裁剪、高可扩展性和强鲁棒性等优点,因而更适合执行无人单体无法胜任的区域监测/遍历类任务及外界环境过于危险且有冗余性要求的任务[3]。
已有研究表明,对无人系统智能性进行有效评价或制定相关标准,将发挥技术引领作用。智能性是无人集群最本质的特征。无人集群智能性描述与等级划分是伴随着无人系统的集群化与智能化发展提出的全新问题。随着实际应用场景复杂性不断提升,提高无人集群整体智能性已成为一种重要的发展趋势。智能都是通过级进方式获得的。在无人集群研究领域,若不对其智能性进行澄清与合理建模,缺乏详细合理的等级划分,则难以有效促进其应用研究、技术实现与持续发展。研究无人集群智能性描述框架与等级划分对其研究政策制订者、设计者与研发人员及使用者都有重要现实意义,可为其发展政策规划、应用研发与优化改良提供助力。
1 相关工作
目前以无人系统或无人集群为评价对象且直接以智能性为评价目标的等级评价研究并不多见,并且绝大多数研究主要局限于国内。针对无人驾驶车辆,陈君毅等[4]指出智能性是指其具备和人类相当、甚至超过人类的驾驶技能。北京理工大学的研究团队[5]以无人驾驶车辆本身与需要其完成的驾驶任务与所处环境三者构成的复杂交互系统为研究对象,建立了由任务复杂度、环境复杂度和人工干预程度共同组成的无人驾驶车辆智能性度量模型,具体如图1所示。在划分智能性等级时,先将这三个维度划分为了5个等级,并以这三个维度的等级度量求和结果及其行驶质量为依据,将无人驾驶车辆的智能性划分为了10个等级。该划分在指导国内历届“智能车未来挑战”赛事设定中发挥了重要作用,但其完全是从系统外部视角度量其智能性,因此对其设计研发实际指导意义不大。
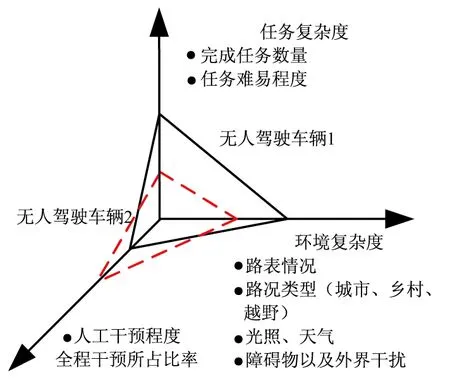
图1 无人驾驶车辆智能性度量模型
针对无人集群,一种以实施评价的条件、过程与结果为基本依据,由场景复杂性、系统适变性和系统有效性三个维度组成的通用智能性等级度量模型被提出[6],如图2所示。尽管该模型预期可结合无人集群内外部因素共同决策其智能性高低,但其在具体实施时存在各维度等级如何划分及如何综合量化的难题。

图2 无人集群智能性度量模型
张涛等[7]根据海洋机器人与人工智能发展历史,从宏观层面分别将其自主认知、群体智能和自主控制水平划分为了6个级别,如图3所示。其中,群体智能被划分为结构控制、任务规划、合作、任务重规划、合作探究和职责6个级别,但该研究并未对各级别的具体内涵与划分依据进行详细解释,也未提出详细评价指标。

图3 海洋机器人的评价指标
上述研究之外,许多研究机构与学者对无人系统自主性等级划分模型进行了研究。尽管自主性与智能性在概念上不能等同,但由于系统智能性的外在行为方式为自主,因此这些划分方法仍能从一定程度上反映系统的智能性级别,可作为无人系统智能性等级评价的备选模型。中国科学院沈阳自动化研究所[8]将现有的无人系统自主性等级评价方法划分为了等级法、双坐标轴法、三坐标轴法、查表法和公式法,进行了比较全面地综述,并在此基础上提出了用于无人系统自主性等级评价的蛛网模型,如图4所示。蛛网模型具有普适性,同时也适用于智能性的等级评价,关键技术选取及其成熟度定制是决定模型好坏的关键。

图4 蛛网模型
概括而言,由于绝大多数无人系统自主性等级评价模型适用的评价对象涉及从无人单体到无人集群在内的各种无人系统,因此伴随着无人系统的集群化发展其适用性被极大地削弱。并且由于缺乏基础理论模型的支撑,也都很难从本质上合理地反映无人集群的智能性。
2 无人集群智能性概念
无人集群是群体智能的一个具体应用研究领域。群体智能研究最早起源于对蚂蚁、蜜蜂和黄蜂等群居性简单生物群体行为的观察与模拟,其内涵具体是指一定规模无智能或者仅具备相对简单智能的个体通过相互通信与分布式协作涌现出整体宏观智能行为的特性。有几种被普遍接受的观点:(1)群体智能具有分布式控制、间接通信、个体行为规则简单、自组织等特点[9];(2)群体智能满足邻近性、品质性、多样性、稳定性和适应性五个基本原则[10];(3)群体智能具有灵活性、鲁棒性和可扩展性三个重要期望特征[11]。这些观点基本上均未能体现其本质,而更多的是在描述其实现的条件与结果。早期的群体智能研究聚焦于设计优化算法,例如蚁群优化算法、粒子群优化算法、遗传优化算法等,后来逐渐形成算法研究和系统研究两大分支。群体智能一词最早被用于描述细胞机器人系统中由多个简单机器人通过邻近交互所产生的自组织模式[12]。基于群居性简单生物群体智能设计的集群机器人体现出了预期的鲁棒性、灵活性和可扩展性,但却受限于数量、感知与通信能力、同构性问题等多方面[13-14]。随着新一代感知、通信及控制技术的进步,使得由众多智能自主无人单体能够相互连接组成智能无人集群,并通过相互协作涌现出群体智能,适应于复杂多变的任务环境。
无人集群是一种复杂适应性系统,组成它的无人智能体可具有高度智能行为与异质性,它们间的指控与通信问题也更为复杂,因此不能完全按照传统的集群机器人概念理解无人集群,也不能完全按照群居性简单生物群体智能的理解来理解无人集群智能性。群体智能强调系统性[15]及系统整体的智能性[16]。在总结分析传统群体智能概念局限性的基础上,何小贤等[17]给出了系统智能的观点。所谓系统智能是指由多个智能模块通过一定规则相互联系与作用在系统层面所涌现的宏观智能。其中系统是指贝塔朗菲所描述的整体大于部分之和的系统。系统智能与群体智能的思想并不冲突,系统智能继承了传统群体智能的合理内核,排除了其在同构性、规模、通信方式和个体能力等方面的限制,因此描述范围更广,可实现功能更强。
综上所述,无人集群智能性源于群居性简单生物群体智能但不应严格受其约束,反映的是一种复杂适应性系统智能性,具体是指在交感网络支撑下,由多个同构或异构无人智能体通过信息交互与反馈、激励与响应等交感行为,激发个体智能,涌现的无人集群整体智能性。无人集群智能性在继承群居性简单生物群体智能合理内核和优点的基础上,不受生物集群智能在同构性、规模、通信方式和个体能力等方面的约束,在表现形式上不仅包含自下而上自组织的群智涌现,而且还可包含自上而下有组织的群智行为。无人集群也因此获得了更多样化的团队组成方式、更高的可扩展性、更强的环境适应性和更丰富、更复杂的任务能力等优势。
3 无人集群智能性描述
3.1 无人集群智能性描述框架
无人集群智能性通过其行为表现,需要依据其行为对其智能性进行等级划分。无人集群行为不能孤立讨论,它是无人集群自身及其所执行的任务与所处环境三者特性的综合结果。无人集群、任务和环境相互作用,共同组成了一个复杂交互系统,如图5所示。
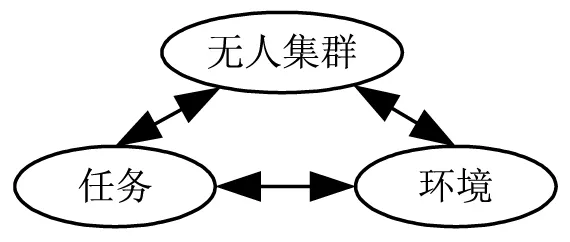
图5 无人集群-任务-环境交互系统
无人集群所执行任务及其任务环境间存在强耦合关系,因此可将影响无人集群智能性的任务复杂性和环境复杂性因素统一抽象为无人集群任务胜任力。同任务复杂性与环境复杂性表述方式相同,任务胜任力也具有显著的层次化特征。为便于描述与刻画无人集群智能性水平,可从无人集群外部和内部两个视角出发分别建立无人集群的任务胜任力度量模型和整体智能行为实现过程模型。前者是从外部观察者的视角来评价无人集群智能性,而后者则是从无人集群完成任务的协同决策过程出发来评价无人集群在各个功能环节上的智能性,进而判定无人集群整体智能性。其中,任务胜任力度量模型的层次化特性提供了一种对无人集群智能性分级的度量手段,而整体智能行为实现过程模型则能从本质上描述无人集群的内在智能性,构成无人集群智能等级划分的直接依据。通过两种模型的映射,可形成如图6所示的无人集群智能性描述框架。将基于外部视角构建的任务胜任力模型和基于内部视角构建的整体智能行为实现过程模型结合起来构建无人集群智能性描述框架,可为无人集群智能性等级二维划分及其测试场景构建提供系统化的基础理论模型支撑,辅助我们提出合理细化的无人集群智能性等级划分方法并构造相适应的等级测试场景。

图6 无人集群智能性描述框架
3.2 无人集群任务胜任力度量模型
无人集群任务胜任力度量从任务复杂性及任务所处的环境复杂性两方面考虑。前者是描述任务固有难易程度的重要手段和依据, 而后者则是影响任务执行难度和执行效果的关键要素。据此,可建立无人集群任务胜任力度量模型,如图7所示。
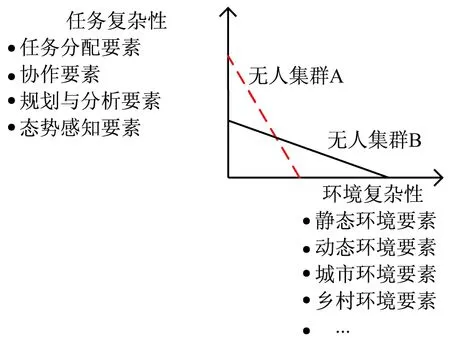
图7 无人集群任务胜任力度量模型
该模型中每一个轴可提供一系列更低层次的度量要素推动无人集群任务胜任力的规范、分析、评估和量测,具体如表1所示。
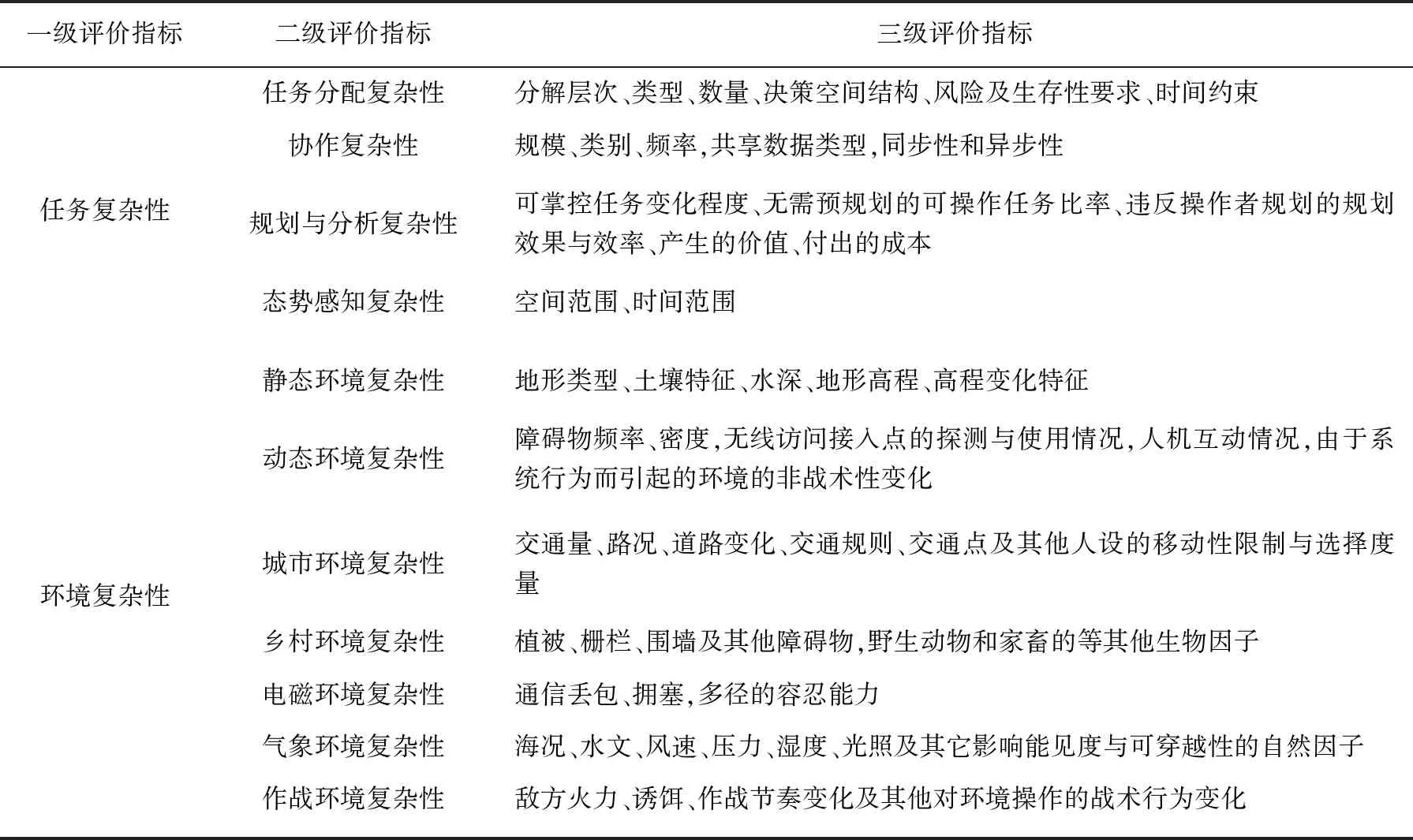
表1 无人集群任务胜任力量化指标体系
任务胜任力度量模型虽可直接进行层次化表征,但若仅依据任务胜任力度量模型进行无人集群智能性等级划分,便会混淆无人集群应用需求与内在智能性间的概念。无人集群内在智能性作为其固有属性,不应随着应用需求变化而变化,真正变化的是应用对无人集群内在智能性的需求。因此,在对无人集群智能性等级划分问题建模时,仅依靠外部的任务胜任力度量模型进行无人集群智能性评价是不完备的,还必须考虑无人集群的内部模型,从内外双重视角考察无人集群智能性。
3.3 无人集群整体智能行为实现过程模型
传统的无人集群整体智能行为实现过程主要是受简单生物集群整体智能行为的启发进一步抽象出无人集群的自组织行为规则进行设计与实现的,最具代表性的例子为Reynolds等[18]提出的“类鸟群”模型。然而,伴随着智能技术的不断发展,这种依据简单规则的无人集群整体智能行为实现过程建模方法,已经不能很好地适用于复杂多变的战场环境,更难以体现无人作战单体的高度智能行为。近年来越来越多的研究人员开始认为可以基于经典产OODA(Observe->Orient->Decide->Act)环来实现无人单体系统的智能自主协同决策过程。OODA环最早由Boyd在20世纪70年代提出,主要由观测、判断、决策和行动四个功能组成,最早用于描述军事决策制订的全过程[19]。尽管经典的OODA环可以用于描述单个无人智能体的决策全过程,但在描述无人集群的协同与交互方面存在明显不足。从整个集群系统内部视角看,由众多智能无人单体构成的无人集群整体智能行为实现过程模型可描述为一个群体化的OODA环,如图8所示。
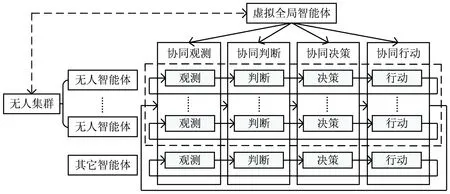
图8 基于群体化OODA环的无人集群整体智能行为实现过程模型
该模型中无人智能体间及其与其他智能体间协同观测、判断、决策和行动,共同完成目标任务。这四项群体化功能可支持无人集群在任务执行的各个阶段具备更强大的可操作能力,以此极大地改善整个任务的执行能力。以群体观测为例,能够使得整个系统观测的范围更广、观测类型更多样并且纠正与弥补个体感知的错误与损失。将整个集群看作一个统一整体时,便相当于组成了一个具有全局视角的虚拟智能体。它在群体观测、判断、决策和行动过程中,基于全局视角从集群整体层面进行综合权衡,最终体现在集群中个体上的行为不一定最优,但集群整体行为产生的效果却是最优的,即体现了群体智能。它非自上而下的全局控制,其作用并非是取代集群中个体做出决策,只是其决策在虚拟全局智能体辅助下更具宏观视角,即负责辅助集群内个体获取与处理全局信息,在集群内部进行协调。与依据任务胜任力度量模型对无人集群智能性进行表象分析不同,依据整体智能行为过程实现模型可对无人集群智能性进行本质分析。对应高度概括层次化典型无人集群任务胜任力,可首先对无人集群在协同观测、判断、决策和行动各个环节的智能性进行考察与刻画,在此基础上进行综合集成,获得相对应的无人集群的智能性等级的内在划分依据。
4 无人集群智能性等级划分
依据该文提出的无人集群智能性描述框架,并借鉴张涛等[8]提出的群体智能等级划分和美国空军研究实验室[20]提出的无人机自主性控制等级划分,这里以编队控制、任务规划、协同任务、任务重组、协同认知和完全理智6种典型的任务胜任力作为纵向划分的依据,它们所对应的无人集群智能性等级划分标准如表2所示。从无人集群内部整体智能行为实现过程模型与等级划方的横向关系来看,表中比较全面地分析了6种典型任务胜任力在群体观测、判断、决策和行动四个方面的相应的内在智能性实现要求,实现了无人集群智能性各等级评定要求的合理细化,可为无人集群整体的智能性提升与评价提供比较全面的指导与反馈;从无人集群外部胜任力模型与等级划分的纵向关系来看,每列描述该度量从低到高的智能性实现要求,实现了对无人集群整体智能性及各阶段智能性要求的层次化表征。任务胜任力度量模型和整体智能行为实现过程模型的关联映射使得无人集群的智能性描述框架与等级划分方法更加合理与清晰。
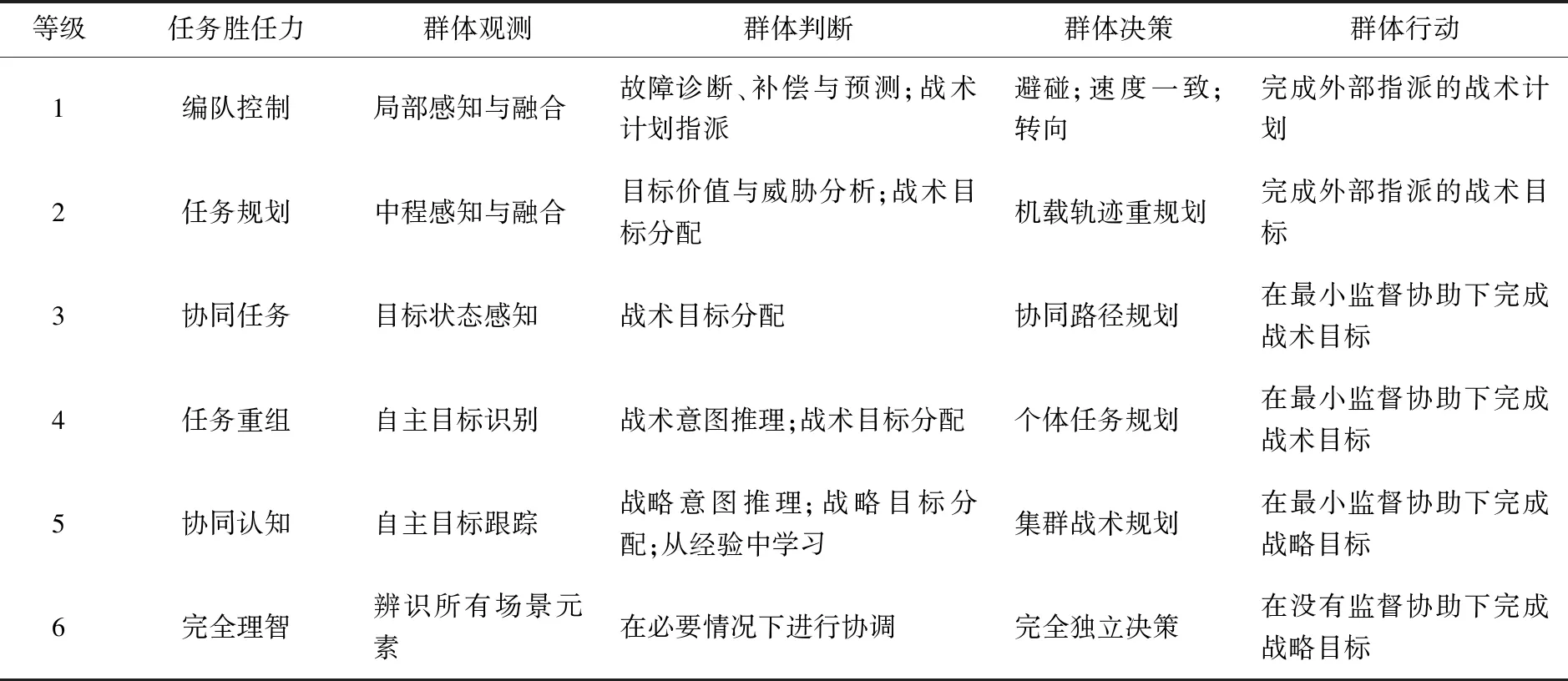
表2 无人集群智能性等级划分
5 结束语
已有无人系统智能性等级划分在实用性、系统性及可操作性等方面存在较大缺陷,且并非针对无人集群提出。结合群体智能和系统智能概念分析,给出了一种合理的无人集群智能性定义,基于双重视角提出了一种融合了无人集群外部任务胜任力度量与内部整体智能行为实现过程的智能性描述框架,该框架能够更全面深刻反映无人集群智能性需求与实现,并依据该框架提出一种基于群体化OODA环的无人集群智能性等级划分方法。
随着无人集群技术研究的不断深入与深化,其智能性描述、等级划分与评价研究也必将出现逐步深入与深化趋势。未来可持续深化研究的方向主要包括:(1)在每个层次中融合任务胜任能力度量模型,为支持无人集群智能性试验鉴定与测试场景构建提供便利。(2)在当前等级划分基础上,在纵向标准上引入能力成熟度概念,使模型用于智能性评价时更客观。(3)将当前等级划分进一步细化分层,并形成具备可操作性和计算性的评价指标体系。(4)选择合适策略分析各度量要素的权重,形成实用可行的综合量化分析方法。
