基于构造特征点信息的军用车辆行为分析算法*
2022-09-16王华杰翟丽红张俊生
王华杰,翟丽红,张俊生
(太原工业学院,太原 030008)
0 引言
近年来,随着军事领域视频监控覆盖范围的扩大,视频监控手段已成为监控军事交通场景的一种非常重要的方法。随着硬件设备和软件算法的发展,越来越多的学者致力于复杂军事交通场景中的车辆行为分析研究。目前,已经有多种基于不同算法的车辆目标检测分析方法得到实现。
根据不同的算法原理,交通视频分析方法可分为自顶向下法和自底向上法两类。自顶向下法适用于车辆目标没有明显遮挡的情况,在合适的分类器下,其拥有很高的检测及跟踪精度。然而,该类方法计算复杂度高,导致实时性较差。此外,军事交通场景复杂多变,军用车辆的相互遮挡及环境因素极大地影响了该类方法的鲁棒性。自底向上法采用从局部到整体的分析方法,以车辆目标局部的特征点检测为基础,逐渐向上完成目标的分割过程,即便车辆目标在运动过程中被部分遮挡,通过检测局部特征点,仍可完成目标跟踪任务,进而对其进行行为分析。此外,基于目标特征点的检测算法运行效率高,更能满足实际军事场景下对实时性的要求。在自底向上算法的系统框架中,研究工作主要聚焦于边缘、角点、部件、斑点等各种局部特征的研究。2004 年,Lowe 等提出了SIFT 局部特征算子算法,通过利用特征点周围的梯度信息对目标进行特征描述,利用图像金字塔解决尺度问题。这一方法具有良好的尺度不变性及旋转不变性,近年来得到广泛的发展和应用,并出现了多种改进特征算法,包括PCA-SIFT、GLOH、SURF、DAISY等。
本文将SIFT 算法应用于军事交通视频分析,以目标图像局部特征点为研究对象,结合跟踪匹配算法获取军用车辆特征点的运动轨迹,实现了轨迹间的聚类问题分析,并将其应用于特定场景下的超速行驶、低度行驶、逆行、停车和变道等车辆行为分析。
1 算法实现过程
1.1 轨迹点3D 信息重构
在军事交通场景下的军用车辆目标特征点的检测中,背景环境中具有较强边缘信息的特征点将对检测结果带来干扰与误差,因此,在检测前采用帧差法将背景中的干扰特征点进行剔除。为了减少数据信息运算量,加快运行速度,在视频图像中上设置兴趣区域,如图1 中蓝色方框所示。

图1 视频图像中的兴趣区域
视频采集装置标定是获取目标3D 参数的关键,因此,通过视频采集装置标定获取目标在3D 空间和图像平面内的对应关系。视频采集装置的工作过程为:
在实际军事场景中,常规军用车辆目标的高度范围一般不超过4 m,因此,利用车辆高度信息间接获取车辆轨迹点的3D 信息。采用高度枚举法对轨迹高度信息进行试探,来重构2D 轨迹点在3D 空间中的轨迹,并利用车辆目标刚性运动的特点,计算不同轨迹之间的高度关系:


图2 采用高度枚举法得到的轨迹高度间的关系
基于逆投影变换思想,在军用车辆行驶路径中,将军用车辆运动方向(即道路方向)设置为Y方向,而军用车辆的运动趋势同样沿着Y方向。构造与Y方向平行的多个逆投影面,进而对车辆的2D 轨迹点在3D 空间中进行信息重构。在标定场景中设置多个平行于Y方向的投影面,将2D 图像上的轨迹点逆投影到多个已知Z的平面上。当已知车辆轨迹点的图像坐标(u,v)及其在世界坐标系下的Z时,根据式(1)可求得其世界坐标,从而可以恢复车辆目标在不同高度平面的3D 轨迹。图3(a)为模拟同一军用车辆目标在理想状态下的运动轨迹,其在标定场景下的2D 图像投影如图3(b)所示。从图3(b)可以看出,不同高度的特征点轨迹具有不同像素位移及像素速度。因此,通过构造不同高度的逆投影面,便能够估算出其在3D 空间中的轨迹,如图3(c)所示。利用得到的轨迹信息及刚性目标的运动特点,即可分析车辆目标在3D 空间中的真实位置信息及一系列3D 特征,如车辆的实际运行速度、加速度、位移、行驶方向等。
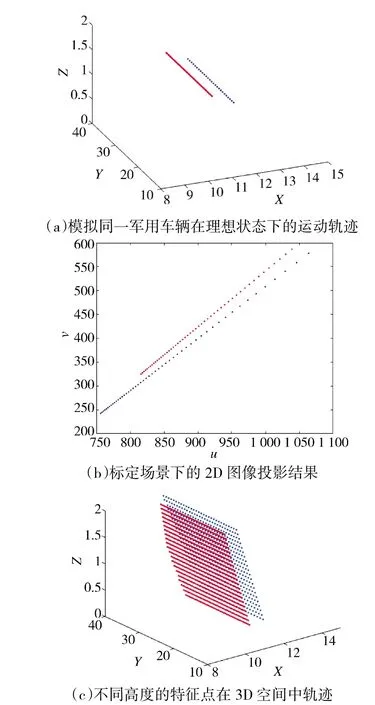
图3 车辆3D 轨迹重构结果
1.2 轨迹聚类
利用特征点轨迹的3D 信息构造轨迹间的相似度量关系,将其应用到谱聚类算法中,并结合Ncut算法,实现对军用车辆特征点轨迹在3D 空间中的聚类。聚类算法具体实现步骤如下:
1)根据轨迹数据之间的相似度量构建轨迹间的相似度矩阵W;

4)计算与H对应的指示特征向量Q;
5)利用Q 的前k 个最小特征值对应的特征向量进行K-means 聚类。


2 军用车辆行为定义与分析
利用获取的军用车辆轨迹3D 信息,进一步分析确定场景下的车辆个体的行为模式,从而对该场景下的车辆异常行为进行检测。
2.1 高速行驶与低速行驶

2.2 逆行
视频采集装置具有固定的安装位置与角度,可根据视频路段中军用车辆的行驶方向,确定道路的正确行驶方向,然后利用视频采集装置标定技术获取方向标志线的3D 位置信息及其方向向量。如图4所示,在两车道路段设置正确行驶的方向向量,而对于多车道路段,根据实际情况设置两个或多个正确行驶的方向向量。

图4 车道正确行驶方向的设置

2.3 停车

2.4 变道
对于正常行驶的军用车辆目标,其运动趋势沿着车道线方向,即其运动轨迹与道路标志线近似平行关系,而发生变道行为的车辆运动轨迹与道路标志线之间存在一定夹角。基于军用车辆行驶的这种特点,采用以下方法对车辆的异常变道行为进行判别:对相应军事场景下的视频采集装置进行手动标定,获取道路上标志线的实际3D 空间坐标;利用每个类别中车辆特征点的3D 轨迹信息,计算其在X方向上的方差:

3 算法实验验证
3.1 聚类结果分析
采集了某地区20 个路段的1 000 组军用车辆轨迹数据,对包含不同目标数量的车辆的轨迹数据集进行聚类分析。图5 所示分别为两车、三车、四车和五车聚类分析的实验结果,由图5 可知,即使军用车辆间发生共速或存在部分遮挡,算法仍可以将属于不同车辆的特征点轨迹进行有效的聚类。
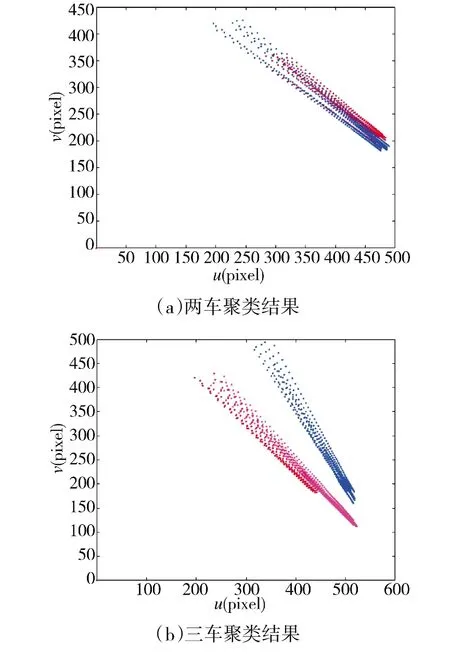
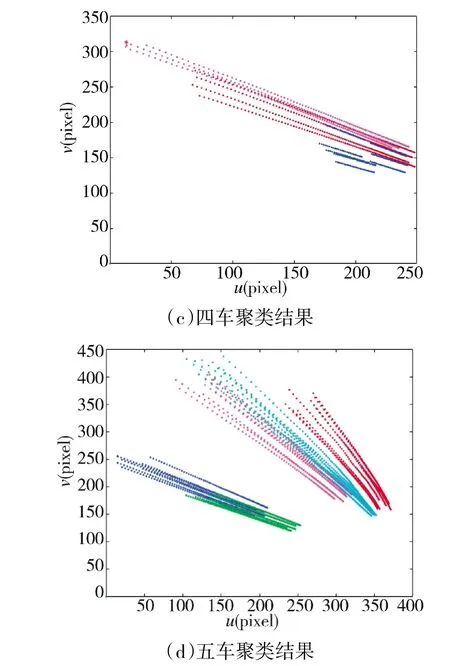
图5 车辆特征点轨迹聚类结果
将1 000 组数据按车辆目标的个数进行聚类结果统计分析,并与传统的基于2D 轨迹特征的方法进行对比,其结果如表1 所示。

表1 聚类精度对比
为了更好地评价算法的聚类效果,在表1 中对相关实验结果进行定量分析,对聚类精度进行定义:

其中,N 表示具有相同车辆数目的轨迹数据集个数;t为第i 个轨迹数据集中正确分类的轨迹条数;n为第i 个轨迹数据集所包含的轨迹总条数。
从实验数据可以看出,在两车聚类分析中,精度提高4.57%;三车聚类分析中,精度提高8.33%;四车聚类分析中,精度提高10.85%;五车聚类分析中,精度提高17.96%。因此,本文所提出的算法明显改善了聚类精度,尤其在车辆数增加的复杂情况下,更是显著提高了车辆聚类精度。
3.2 军用车辆行为分析验证
通过对2D 轨迹信息在3D 空间中进行重构,可以估计每条轨迹的真实速度,进而估计该军用车辆目标的实时速度,绘制该车辆目标在各个时刻的速度曲线,进而判断其是否存在高速行驶、低度行驶、逆行、停车和变道等行为。图6(a)为对某路段车辆目标提取的2D 轨迹数据进行聚类分析的结果,图6(b)为对应军用车辆的实时速度曲线。
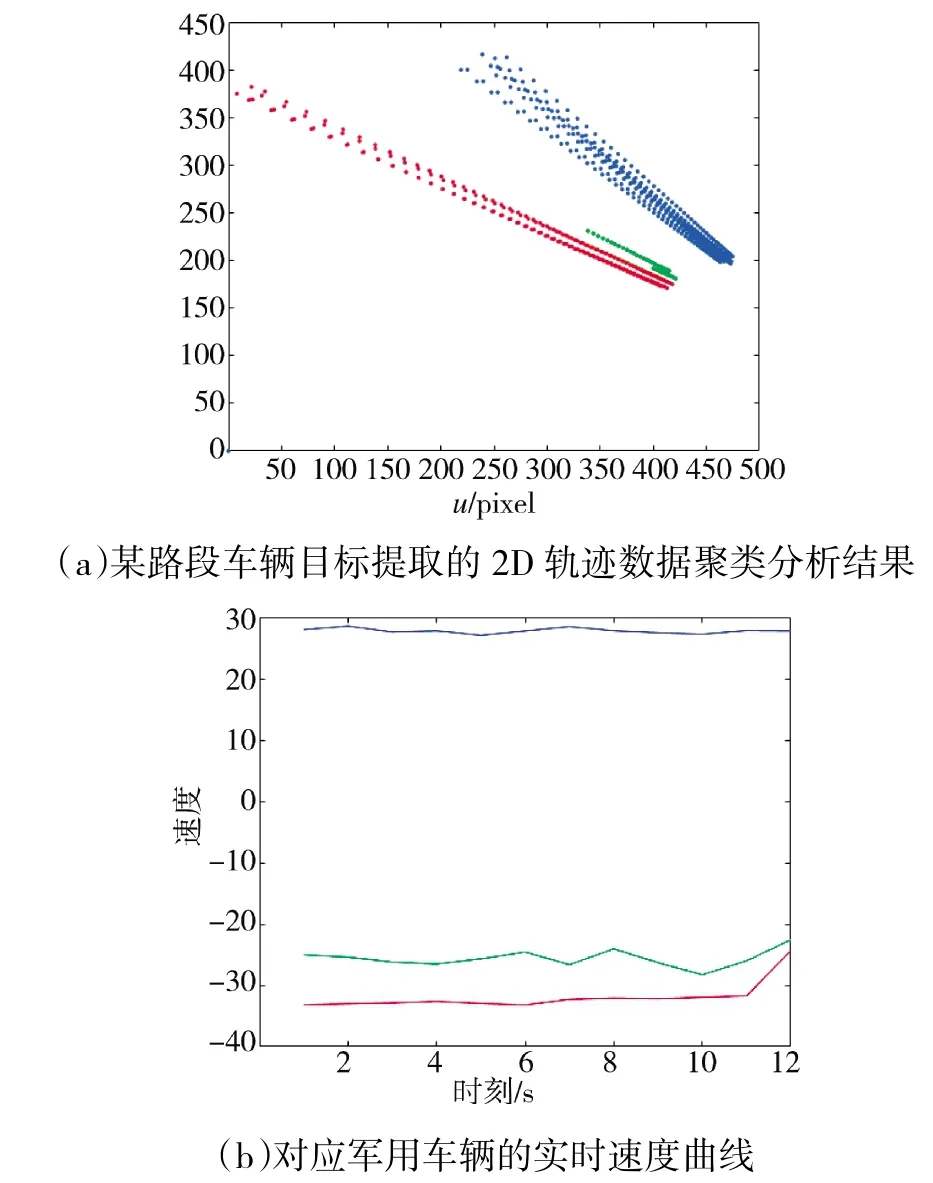
图6 车辆目标实时速度分析
截取当前路段同时刻的车辆实时速度的部分数据结果,如表2 所示。正负号代表车辆的不同运行方向,上行车辆速度标记为正,下行车辆速度标记为负。根据估算的车辆目标的实时速度作为该军用车辆目标是否发生高速行驶或低速行驶的判别指标。对于逆行行为,通过观测其实时的运动矢量进行判断,如表3 所示。若出现异常停车事件,其车辆目标的轨迹速度将持续逼近于0,速度变化曲线如图7 所示。

表2 军用车辆速度时刻表

表3 军用车辆实时行驶的方向角

图7 停车速度变化曲线
对于变道行为,除了依据军用车辆轨迹实时变化的方向角进行判断,还需根据其在X 方向上的偏移量作进一步判别。如表4 所示,对某军用车辆实时行驶的方向进行分析,可发现车辆目标运动的方向角持续较大,而其对应的轨迹数据在X 方向上的方差也大于预设阈值,因此,判断其发生了异常变道行为。

表4 变道轨迹数据的方向角及X 方向方差情况
从上述实验结果可以看出,通过对轨迹速度、实时运动矢量、偏移量等信息进行分析,所提出的算法,可以较为准确地识别军用车辆的行驶速度、逆行、停车、变道等行为。
4 结论
为了解决军事交通场景中军用车辆运动目标的分割问题,本文研究了一种基于构造特征点信息的军用车辆行为分析算法。在该算法中,提出了一种基于刚性运动约束的车辆轨迹3D 特征分析方法,构造出一种新的轨迹集之间的相似性度量,并将其应用到谱聚类算法的框架中,实现了军用车辆特征点轨迹在3D 空间的聚类。将该算法应用于特定军事交通场景下的军用车辆行为分析,利用军用车辆轨迹3D 信息及其聚类结果,对高速行驶、低速行驶、逆行、停车和变道等行为进行了分析,实验结果显示该算法具有较高的精度和鲁棒性。在后续工作中,将对该算法在图像模糊、恶劣气候、尺度、视角及光照变化等复杂军事交通场景下的分析速度和精度进行进一步的研究与提高。