协作机器人在发动机装配线的应用
2022-09-15吴连伟李文博栾建伟王平代志勇宋永正
吴连伟,李文博,栾建伟,王平,代志勇,宋永正
(潍柴动力股份有限公司一号工厂,山东 潍坊 261061)
1 前言
协作机器人是继桁架机械手、关节机器人之后一种全新的机器人种类,在中、轻重量零件的制造加工、装配方面优势突出,并且能真正参与到复杂的人机交互、人机协同作业中,也是未来的发展趋势,助力智能制造的发展。WZY生产线油底壳自动拧紧工序主要生产H机型、WP10、WD12三大系列,WP10、WD12油底壳拧紧螺栓数量为12个,H机型油底壳螺栓拧紧数量为16个,螺栓头部大小为M13,支撑块M13,扭力要求为:29~49N·m。
本论文主要论述了协作机器人在发动机油底壳螺栓智能拧紧过程中的应用,采用倒挂式的应用模式,借助视觉引导技术,创新性的开发研究空间三维反力抵消和重力平衡机构,并基于RFID实现多机型程序的自动调用,建立数据库通讯,自动匹配发动机螺栓拧紧程序,实现全机型自动拧紧工艺要求。
2 发动机油底壳作用及协作机器人介绍
2.1 油底壳作用
油底壳是发动机的重要组成部分,是发动机储存机油的容器,同时收集和储存流回的机油,散热并防止机油氧化,同时油底壳底部带有放油螺塞,保养时从油底壳放油螺塞处放出氧化的机油。
2.2 协作机器人介绍
1995年美国西北大学爱德华和迈科尔博士提出合作机器人(Collaborative Robot,Cobot)。2009年优傲公司推出首款产品UR5(图1),2015年沈阳新松机器人公司推出七轴柔性协作机器人,而协作机器人被广泛地应用在各个领域,成为中国智能制造2025的一个重要标志。具备以下特点。
图1 UR3,UR5,UR10等协作机器人
(1)轻量化。使机器人更易于控制,提高安全性。
(2)友好性。保证机器人的表面和关节是光滑且平整的,无尖锐的转角或者易夹伤操作人员的缝隙。
(3)感知能力。感知周围的环境,并根据环境的变化改变自身的动作行为。
(4)人机协作。具有敏感的力反馈特性,当达到已设定的力时会立即停止,在风险评估后可不需要安装保护栏,使人和机器人能协同工作。
(5)编程方便。对于一些普通操作者和非技术背景的人员来说,都非常容易进行编程与调试。
3 设计开发应用思路
借助协作机器人,运用视觉引导技术、RFID技术、数据库等技术,设计开发基于视觉引导的协作机器人油底壳螺栓智能拧紧装置(图2),主要由视觉引导机构、拧紧机构、空间三维反力抵消机构、RFID、工件定位机构、数据库及电气控制部分组成,具备防错功能且与线体联动,实现技术新突破。由于空间局限,采用协作机器人倒挂方案,借助RFID识别机型,应用视觉引导机器人准确拧紧,保证装配的一致性。
3.1 硬件结构
(1)工件定位机构。根据现场位置,专项设计开发自适应定位机构用于发动机准确预定位。
(2)空间三维反力抵消机构。通过三维仿真模拟,设计空间三维反力抵消机构,用于抵消拧紧轴拧紧时的反抗力,保证协作机器人不出现受力报警。
3.2 电气系统结构
(1)RFID机构。用于机型识别,判断机型,读取MES信息。
(2)数据库及电气控制部分。自主开发数据库,通过读取MES信息,根据不同机型实现油底壳螺栓自动拧紧,拧紧数据自动保存、上传。
3.3 视觉引导结构
发动机经过预定位后,通过视觉相机拍照,自动计算偏移尺寸及角度,实现准确定位(图2)。
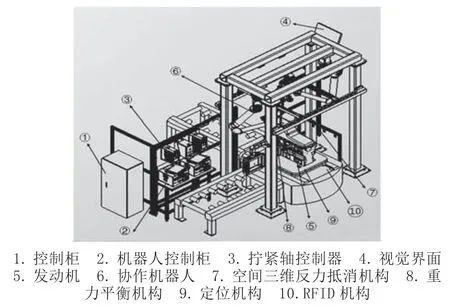
图2 协作机器人油底壳螺栓智能拧紧装置整体结构示意图
4 整体结构及机械部分功能
通过三维软件模拟仿真,其中机械部分主要由空间三维反力抵消机构、重力平衡机构、定位机构、拧紧机构四部分组成,主体结构采用龙门框架可调结构,便于后期精度调整,托盘定位采用带阻尼停止器,减少托盘撞击带来的精度偏移(图3)。
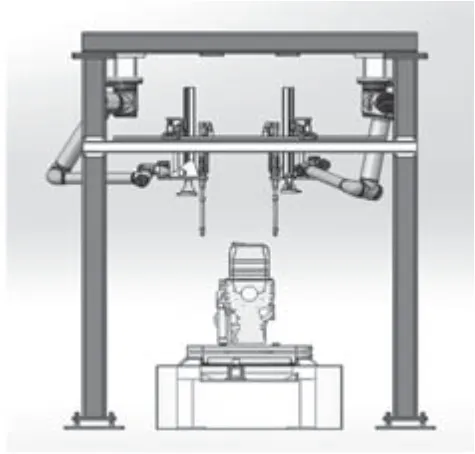
图3 整体机构三维仿真图
4.1 空间三维反力抵消机构
由于协作机器人负载较小,拧紧轴在拧紧过程中会产生反力,直接反馈给协作机器人,导致机器人报警,为解决拧紧轴反力问题提出并设计空间三维反力抵消机构(图4),三轴都可独立运动,Z轴采用平衡气缸抵消重力,拧紧轴反力会传递给三轴反力抵消机构,协作机器人只需要走坐标即可完成拧紧过程。
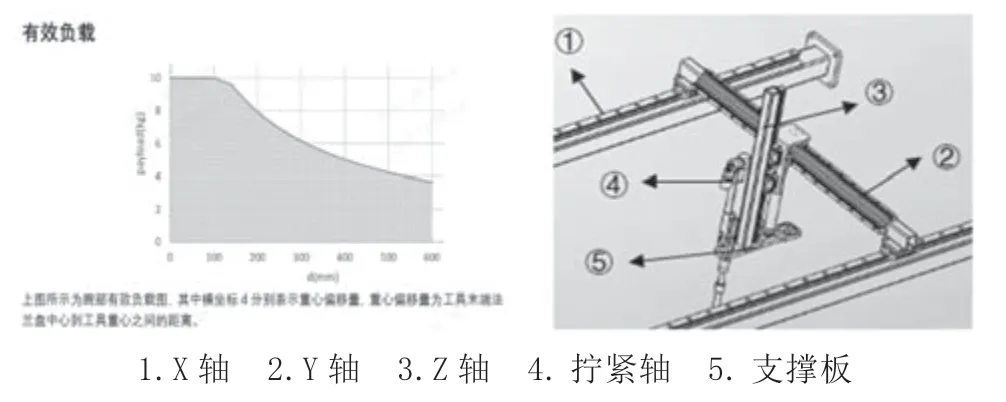
图4 拧紧轴反力抵消装置组件
4.2 重力平衡机构
由于机器人采用吊装式安装,在机器人工作时,极易导致机器人移动过程中报警,因此通过计算拧紧机构的负载,设计制作重力平衡机构(图5)。
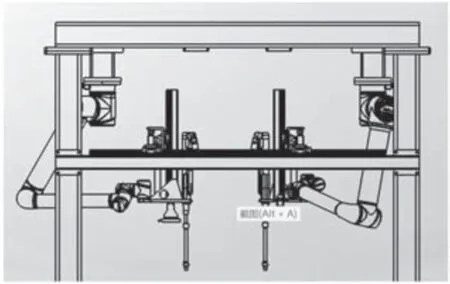
图5 重力平衡机构
利用机构的支撑力来抵消机器人及拧紧机构的重力,当机器人下探拧紧时,使其压力增大,给机构一个向上反作用力,多余的压力从减压阀处排除,向上移动则反之,这样就能够使机器人在移动时达到一个平衡状态。
4.3 三位一体精确定位机构
一般在发动机装配线上,普遍采用插销定位或者举升定位的方式实现托盘二次定位,从而满足各类定位功能需求,但此种方式只对托盘的定盘起到精确定位的作用,动盘还会存在间隙,因此设计三位一体发动机精确定位机构(图6)。
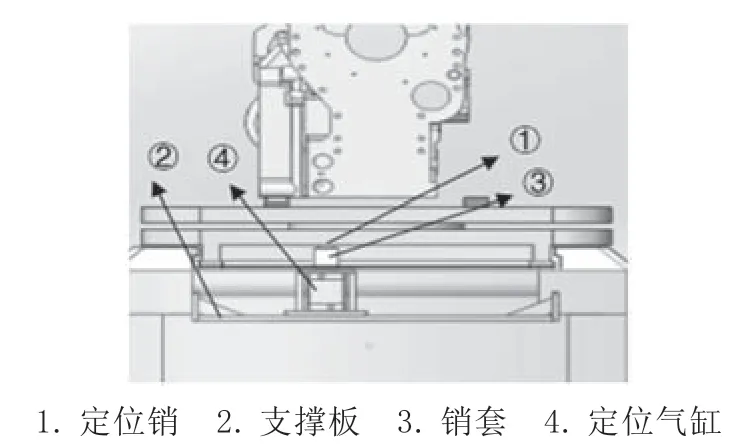
图6 定位机构
当托盘进入工位前止档气缸升起,对发动机托盘进行预定位。托盘底部带有定位销孔,当发动机到位后,对托盘进行定位插销,同时侧面动盘定位机构伸出,对动盘进行精确定位,保证视觉拍照时发动机螺栓孔位置准确。
4.4 拧紧机构原理
用来拧紧螺栓的执行件是拧紧轴,其拧紧扭矩T(N•m)需克服螺纹间的摩擦力矩和支撑面间的摩擦力矩,从而产生预紧力F(N):
T=K·d·F×10-3
式中,d是螺纹公称直径(mm),拧紧扭矩系数K一般取0.2,综合计算得出,拧紧轴需输出扭矩30N·m,伸缩轴伸缩量50mm。基于拧紧原理设计出拧紧机构,如图7。
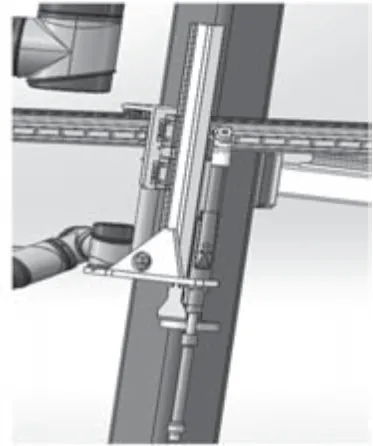
图7 拧紧机构
5 视觉引导及电气通信
5.1 视觉引导技术
视觉技术,类似如人的一双“眼睛”,所谓机器视觉技术,就是给机器设备配置上“眼睛”,通过逻辑计算使得机器设备具备人的视觉功能:能识别物体和定位物体。
利用视觉相机进行拍照定位,将协作机器人与相机标定在同一坐标系,工件到位后,协作机器人根据RFID反馈数值移动到拍照位,相机1、2分别进行拍照,相机计算工件偏移量及偏移角度反馈给PLC,PLC根据数值计算引导协作机器人进行位置补偿位置,完成拧紧任务(如图8)。

图8 视觉引导系统
5.2 RFID机构
通过RFID电子标签自主识别不同机型的发动机,对比调用不同拧紧参数,能对多种机型实现差异化自动拧紧。
RFID中间件采用B/S架构,开发语言为C#,数据库为SQL,控制方式采用博途TIA-Portal-V16编程软件控制程序自主开发,信息流的传递方式(图9)。

图9 RFID电气通信及控制方式
发动机信息存入托盘RFID标签,当发动机进入工位,读写器将读取的信息,写入MES与交换机,通过交换机传入PLC及数据库进行数据绑定,信息绑定成功后进行反馈信号,通过超五类屏蔽线连接到交换机,每个工位通过双链路接入网络,实现网络冗余和高可用。
上位机按通讯协议校验,从而保证主机与PLC的通信准确无误,且主机可向PLC写数据,实现单点强近置位和复位的功能。
5.3 电气通信及控制方式
采用BlandC编写主机与PLC的通信程序,机器人通讯主要与PLC互通,当PC接收到应答字符ACK后,数据通信连通,实现三者PLC-机器人-上位机的数据通讯。
PC可对PLC内各软设备进行读、写和强制ON/OFF操作。除开PLC的计时器和计数器的设定值采用常数时,文件寄存器内的数据,FX2N系列PLC的所有开关量输入、输出以及各软件设备对PC都是透明的。
根据发动机的信息设定数据传输的起始地址和数据长度,保证发动机信息能够完整、准确的传送到设备PLC中。通过通讯代码及指令控制机械臂沿XYZ轴直线运动,随臂视觉系统对螺栓进行自动识别,并通过I/O对机械臂完成位置反馈。
6 应用效果
基于视觉引导的协作机器人油底壳螺栓智能拧紧装置已在装配线上成功实施(图10),实现全系列发动机油底壳螺栓智能拧紧,节省人力,保证产品质量,并提高生产效率。

图10 整体效果图
(1)两台协作机器人联合运用,效率提升15.3%。
(2)拧紧数据智能匹配,自动上传,实现产品质量的可追溯性。
(3)全自动装配,避免人工拧紧稳定性较差等因素造成的拧紧扭矩不到位问题,降低装配返工率。
7 结语
随着机器人产业与人工智能技术融合,协作机器人毋庸置疑的成为数字化转型和新技术应用的绝佳平台,这是实现“中国制造2025”的重要举措之一。
本文阐述了协作机器人在发动机油底壳螺栓智能拧紧过程中的应用。采用倒挂式的应用模式,借助视觉引导技术,创新性的开发研究空间三维反力抵消和重力平衡机构,并基于RFID实现多机型程序的自动调用,建立数据库通讯,自动匹配发动机螺栓拧紧程序,实现全机型自动拧紧工艺要求,进而提高生产效率和保证产品质量。
