苹果采摘机器人机械臂运动学分析
2022-09-15孙旖彤张建锐李涛敬永铎潘肖楠李明明
孙旖彤,张建锐,李涛,敬永铎,潘肖楠,李明明
(1.陇东学院;2.国网甘肃省电力公司庆阳环县供电公司;3.庆阳质量检验检测研究院,甘肃 庆阳 745000)
对于苹果采摘机器人,国外已经进行了多年的研究。韩国庆北大学成功研制出采摘机械手具有4自由度的苹果采摘机器人,可以持续工作20h。比利时BAETEN J等研发了一款安装在可升降运动平台上,由拖拉机拖动的苹果采收机器人。该机器人采用6自由度机械臂,末端执行器选择气压驱动柔性执行器,采摘周期为8~10s,采摘率达80%。
我国机器人技术晚于西方发达国家近30年之久,尤其在农业果蔬采摘机器人领域的研究更晚。在苹果采摘领域,李想等设计出一种欠驱动式苹果采摘机器人三指末端执行器。马履中等结合果园的实际情况,研发了一种苹果采摘机械手样机。
1 机械臂结构设计
(1)机械臂结构设计模型如图1所示。
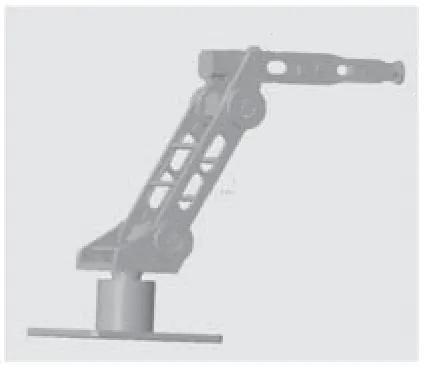
图1 机械臂三维模型
(2)机械臂底座设计。机械臂底座主要由大臂上底板1、电机法兰2、圆筒3、伺服电机4、底板5组成,其三维模型如图2所示。底座的主要作用是支撑整个采摘机械臂及附属元器件,是机械臂稳定运行的基础,设计时需考虑如下要求:
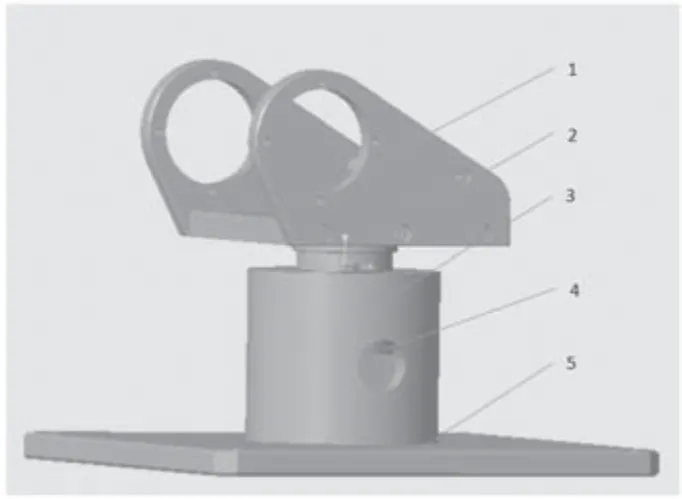
图2 机械臂底座
①为了便于维护,底座的安装与拆卸应比较容易。
②底座的连接螺栓应具有防松动功能,以免因振动产生脱落。
③底座的质量不应过小,以免在机械臂的极限位置产生倾斜或倾倒的现象。
2 机械臂运动学分析
机械臂的运动学主要研究的是机械臂关节之间及与底座之间空间位置的相互运动关系,分析各关节位置在笛卡尔坐标系中的相关转换关系。
2.1 空间位置姿态
(1)位置描述。

图3 位置描述
在空间中建立坐标系{A},就能够使用三个位置矢量表示空间坐标系中任意一点的位置,AP表示为:
(2)姿态描述。在运动学分析时,只用位置描述是不够的,还需建立关节空间的姿态,各位置点的位姿用矢量表示,关节的姿态可用固定在其上的坐标系表示用,在AP点上固定一个坐标系{B}。
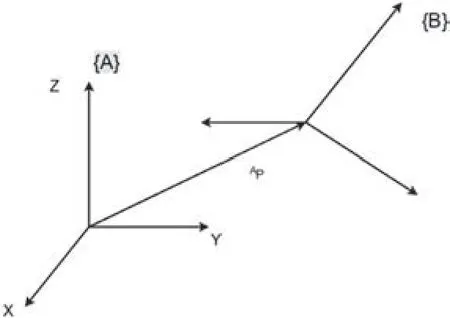
图4 姿态描述

2.2 空间坐标变换
空间坐标变换包括平移变换和旋转变换两种,在空间处于不同位置的坐标系{A}和{B}中,同一点P可表示为:AP和BP,如图5所示。
(1)平移变换。坐标系{A}和{B}的坐标原点位置不同,而各个单位矢量的方向相同,可用APB表示坐标系{B}原点在坐标系{A}中的位置矢量,坐标系中任意存在的点p在坐标系{B}中的位置用BP表示,在坐标系{A}中的位置用AP表示。
两个坐标系{A}和{B}的平移变换如图5所示,则点P的平移变换方程为:
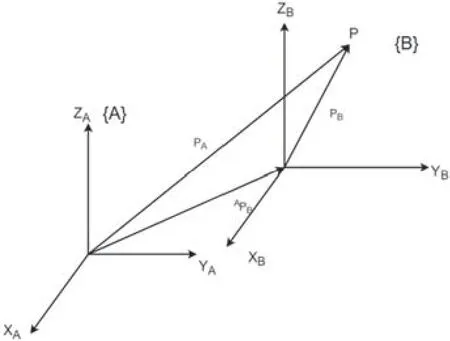
图5 平移变换

(2)旋转变换。坐标系{A}和{B}的各个单位矢量方向不同,而坐标原点相同,对于空间中任意一点P,在坐标系{A}中的位置表示为AP,在坐标系{B}中的位置表示为BP,我们将P点在坐标系{B}中的位置描述通过旋转变换表示为P点在坐标系{A}中的位置描述,这种旋转变换方程表示为:

3 D-H参数表的建立
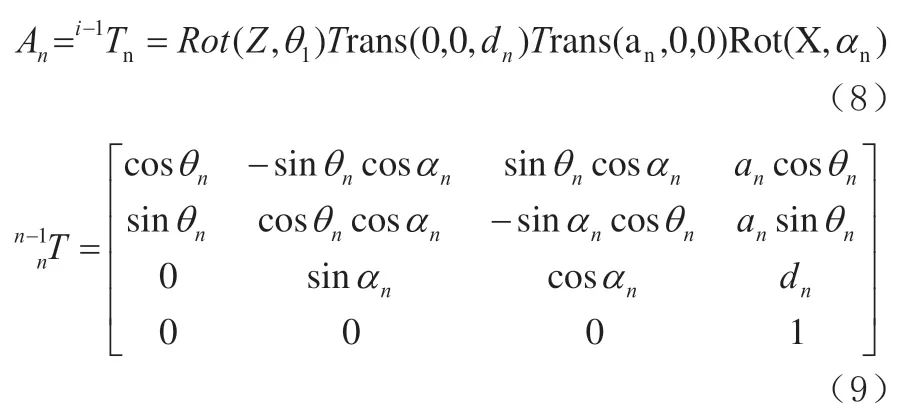
机械臂总变换公式和连杆坐标系{n}与连杆坐标系{n+1}的变换矩阵:
3.1 机械臂的正运动学
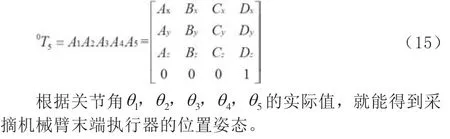
根据前述所示公式,机械臂各关节的空间转换矩阵可表述为:

由上可得到:
3.2 机械臂逆运动学
机械臂的逆运动学主要研究的是末端执行器的空间位姿与各关节位姿之间的复映射关系,已知末端执行器到底座之前的齐次变换矩阵0Tn,求各个关节角θ的过程。齐次变换矩阵如下:


4 结语
通过建立苹果采摘机器人的三维模型,对其进行数学建模,推导运动学、逆运动学计算公式,为后续机器人运动控制奠定基础。
