基于HXD3C电力机车受电弓升、降控制电路的触摸屏仿真
2022-09-15罗旭田国兰
罗旭,田国兰
(四川铁道职业学院,四川 成都 611732)
1 前言
“电力机车受电弓电路”既是高职院校动车组检修和铁道机车车辆类等专业的重要的核心技能之一,同时,也是一门实践性很强的项目,又是铁路现场动车组司机和电力机车检修工必备的核心技能,该项目融入了机械、通信、自动控制和计算机等专业知识。现阶段,我国动车组数量的不断增加,并随着我国经济发展、铁路里程的覆盖不断增加,现场对电力机车受电弓电路的掌握和理解,提出了更高要求。为了更好地适应现场电力机车受电弓电路检修和应急处理的需要,对受电弓技术人才的需求,各站段和学校均购置了电力机车受电弓教学实训平台,但由于受电弓教学实训平台机械弹力大,学员在未学习好电力机车受电弓电路的情况下操作实训平台容易造成设备和人身伤害。在新仿真实训方式未提出前,大部分的电力机车受电弓电路项目教学都是以教师为中心,学员、职工为辅,重理论课堂教学,而轻实践教学环节。这样的理论教学模式,培养出来的学员、职工受电弓电路理论基础知识扎实,但操作受电弓设备困难,对气路机械电路、甚至不会操作,实践操作能力差,不适应铁路现代化领域企业岗位的用人需求。
这样的教学模式的实施过程中存在三个问题:
(1)受电弓设备硬件更新慢。受电弓设备是每个电力机车均要用到的必要设备装置,更新换代速度快,往往一个站段有多种受电弓设备。市场上受电弓设备的价格不菲,学校和站段无力购买多种电力机车教学的实践教学设备,往往购置一种受电弓实践教学的设备只要还可以使用,就年复一年的使用。学校或职工教育用于教学的受电弓实践教学设备与铁路生产现场领域使用的受电弓设备严重脱节。
(2)学员多,设备少,学员的动手实践机会少。随着我国动车组及电力机车的改造升级及铁路领域的发展,现场设备的老化、线路里程的增加,掌握受电弓设备技能的人才需求增加,对受电弓检修人员及随车机械师、驾驶员应急处理和检修技能要求进一步提高。但学校和职工培训用于受电弓实践教学的设备并未得到快速的补充,致使相关专业学员、职工动手实践的机会少。
(3)教学操作的模式单一。不仅理论教学模式单一,实践教学模式也单一。
目前受电弓项目的实训课堂教学模式是:学员、职工基本上都是在实训操作平台上完成,学员、职工用电路和气路把受电弓设备的电路和气路接到固定电源、风源设备,但由于实训设备的缺乏,及实训的安全因素考虑,受电弓硬件控制的设备大部分用同一电源保护电路和风源,学员、职工操作过程不能直观看到受电弓电源电路和气路的通段情况,控制设备的动作状况、及一旦有电路和气路故障不容易直观发现和纠正,机械部分容易造成人员伤害。
针对以上问题,本文提出了基于 MCGS的HXD3C受电弓实践教学仿真系统的设计,并根据铁路现场受电弓控制要求,开发实践仿真教学系统。在实践仿真实训教学时,学员、职工可以不依赖于硬件设备、电源和风源,只需通过在计算机上的仿真软件对受电弓的控制设备进行全真模拟,即可观看到受电弓设备的控制仿真过程。学员、职工在触摸屏的工程窗口中,直接通过观看触摸屏仿真视频,模拟实际受电弓的设备电源、风源通路,编写受电弓电路控制程序,实现模拟受电弓的工作状况,学员、职工可以借助仿真的形式,提升自我的实践动手能力。同时,学员、职工只要有一台计算机和触摸屏,即可不受时间和空间的限制,及实训硬件设备的限制,开展受电弓项目实践内容的学习。
2 MCGS 触摸屏
MCGS触摸屏是受电弓电路的上位机监控系统,是项目的人机接口,并且是一套基于Windowsce系统的交互式平台,是由北京昆仑通态自动化软件科技有限公司开发的软件。该公司提供的MCGS嵌入版最符合本项目。笔者选用最常用的嵌入版7.7版本来进行本项目开发,基于MCGS的受电弓电路仿真系统的设计。嵌入版是在通用版的基础上发展的,是嵌入式计算机监控系统最新的一款触摸屏交互式平台,它能为用户解决现实数据交互人机交流、设备控制领域的工程问题,是一个非常好的交互式开发平台,能够实时实现自动控制设备及动画显示,现场受电弓电源、风源、压力数据实时采集→报警→流程控制,动画显示和报表输出等功能。
3 基于HDX3C电力机车的受电弓实践教学仿真系统的设计实现
3.1 系统软件平台构成
该系统软件平台结构如图1所示,上位机是:昆仑通泰嵌入式触摸屏作为开发平台,MCGS组态软件为编程软件语言。下位机是:西门子S7-200型号的PLC,也可以用西门子S7-200仿真软件与三菱PLC模拟器等来代替PLC硬件或者其他电气控制电路。

图1 系统结构图
受电弓控制电路与计算机的通信,通过RS-232 接口来实现。昆仑通泰触摸屏通过在用户窗口设置参数与受电弓控制电路硬件上的采集口建立物理上的通信连接,实现昆仑通泰触摸屏与受电弓控制电路的通信。但昆仑通泰触摸屏与受电弓控制电路模拟器可通过vspd虚拟串口软件来建立虚拟串口或者与实际硬件电路串口连接,实现两者之间的通信。
3.2 系统设计流程
该系统具体的设计流程如图2所示。
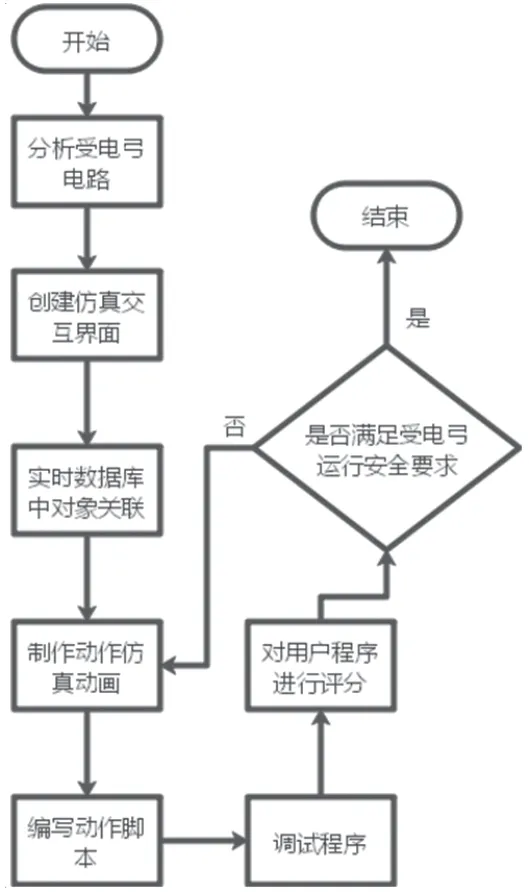
图2 系统设计流程图
3.3 受电弓电路仿真的设计要求
按需要仿真的受电弓要求设计电路,通过电路实现受电弓升起或降下的联锁条件,通过控制I端升弓电磁阀(YV41)得/失电和II端升弓电磁阀(YV42)得/失电,从而控制受电弓的升起或降下(仿真仅需实现对电磁阀的控制,无需考虑受电弓的实际气动控制)。牵引控制柜所有电气器件电路已连接好,仿真中中需检测的信号和开关状态,均已接入PLC实训板输出端子,学员直接使用即可,器件名称及端子定义说明,不在列表中的信号和开关状态,设计时无需考虑。任务中逻辑编程控制需用所有电气器件均已在PLC编程区预装,未连线,需学员根据设计要求自行连线。
受电弓仿真控制器件介绍如下(表1)。

表1 编程控制器件定义表
(1)仿真系统电路设计说明。电路设计时,学员需将任务中用到的所有状态监测器件和编程控制器件添加至电路图中,器件名称和器件编号须与《编程控制器件定义表》中的定义一致。
(2)仿真系统电路设计仿真实现以下功能动画:“机车控制开关”(QA45)断开时整个受电弓升降电路无电;“司机控制I”自动开关(QA43)断开时,I端升弓控制电路无电。I端受电弓升降电路应至少包括以下器件“司机控制I”自动开关(QA43)、I端电钥匙(SA49)、I端升降弓扳键开关(SB41);“司机控制II”自动开关(QA44)断开时,II端升弓控制电路无电。II端受电弓升降电路应至少包括以下器件“司机控制II”自动开关(QA44)、II端电钥匙(SA50)、I端升降弓扳键开关(SB42);I端电钥匙(SA49)置“闭合”位置,I端控制电路有效;II端电钥匙(SA50)置“闭合”位置,II端控制电路有效;先闭合电钥匙端对应的控制电路有效,同时只有一端控制电路有效。
PLC模块能够采集受电弓隔离转换开关的3个状态(受电弓隔离I、受电弓隔离II、正常);PLC模块采集辅助压缩机启动按钮(SB97)、受电弓升弓钥匙(U99)、升弓截断塞门(U43.13)、接地开关(QS10)、受电弓隔离开关(SA96)的状态;I端受电弓的升降弓控制信号输入到PLC采集端“DIb.1”端口。II端受电弓的升降弓控制信号输入到PLC采集端“DIb.2”端口;PLC模块采集模拟量AQ1升弓风缸压力值(0-20mA模拟量);PLC模块控制辅助压缩机继电器(KMC1)的闭合与断开;PLC模块控制I端升弓电磁阀(YV41)和II端升弓电磁阀(YV42)的闭合与断开,控制辅助压缩机指示灯(L01)、I端受电弓状态指示灯(L02)、II端受电弓状态指示灯(L03);继电器元件K01-K08、指示灯元件L01-L04为非极性器件,合理使用二极管,避免电路之间相互影响。
3.4 受电弓电路仿真系统的使用
受电弓电路学员PLC编程设计要求。根据原理图和受电弓电路PLC逻辑编程实现控制原理,按照设计的电路原理图完成系统接线。按照要求编写PLC程序,编译无误后下载到PLC中运行(PLC编程进行受电弓升、降弓控制时,只需满足仿真系统任务中要求即可,其他控制条件无需考虑)。
3.4.1 受电弓升弓控制动画(图3)

图3 仿真画面
(1)满足升弓条件,PLC采集端(DIb.1)接收到升I端受电弓升弓指令时(DIb.1有电即I端升前弓或II端升后弓的指令),控制I端升弓电磁阀(YV41)闭合,I端受电弓状态指示灯(L02)亮,实现控制升I端受电弓。
(2)满足升弓条件,PLC采集端(DIb.2)接收到升II端受电弓升弓指令时(DIb.2有电即I端升后弓或II端升前弓的指令),控制II端升弓电磁阀(YV42)闭合,II端受电弓状态指示灯(L03)亮,实现控制升II端受电弓。
3.4.2 升弓条件
控制升弓动作时必须满足以下全部条件:检测升弓风缸压力低于480KPa时,不能升弓压力不足时,应手工持续按压辅助压缩机启动按钮(SB97),控制辅助压缩机继电器KMC1(=K01)得电,工作指示灯(=L01)按照0.5Hz,50%占空比闪烁,待升弓风缸压力达到要求值735kPa时,PLC模块控制辅助压缩机继电器KMC1(=K01)失电,工作指示灯(=L01)灭。受电弓升弓钥匙(U99)处在开放位(垂直位);升弓风缸截断塞门U43.13处在开放位置(水平位);接地开关(QS10)置于“正常运行”位(断开状态);受电弓隔离开关(SA96)在“受电弓隔离I”位置时,I端升弓电磁阀不能闭合。受电弓隔离开关(SA96)在“受电弓隔离II”位置时,II端升弓电磁阀不能闭合;受电弓隔离开关(SA96)在“正常”位置时,可控制I端或II端升弓电磁阀闭合。
3.4.3 降弓控制
(1)结合PLC检测,I端升降弓扳键(SB41)位置在“0”位置,控制I端升弓电磁阀(YV41)断开,I端升弓工作指示灯(=L02)灭,实现控制降I端受电弓。
(2)结合PLC检测,II端升降弓扳键(SB42)位置在“0”位置,控制II端升弓电磁阀(YV42)断开,II端升弓工作指示灯(=L03)灭,实现控制降II端受电弓。
(3)HXD3C电力机车受电弓升降控制参考电路(见图4)。
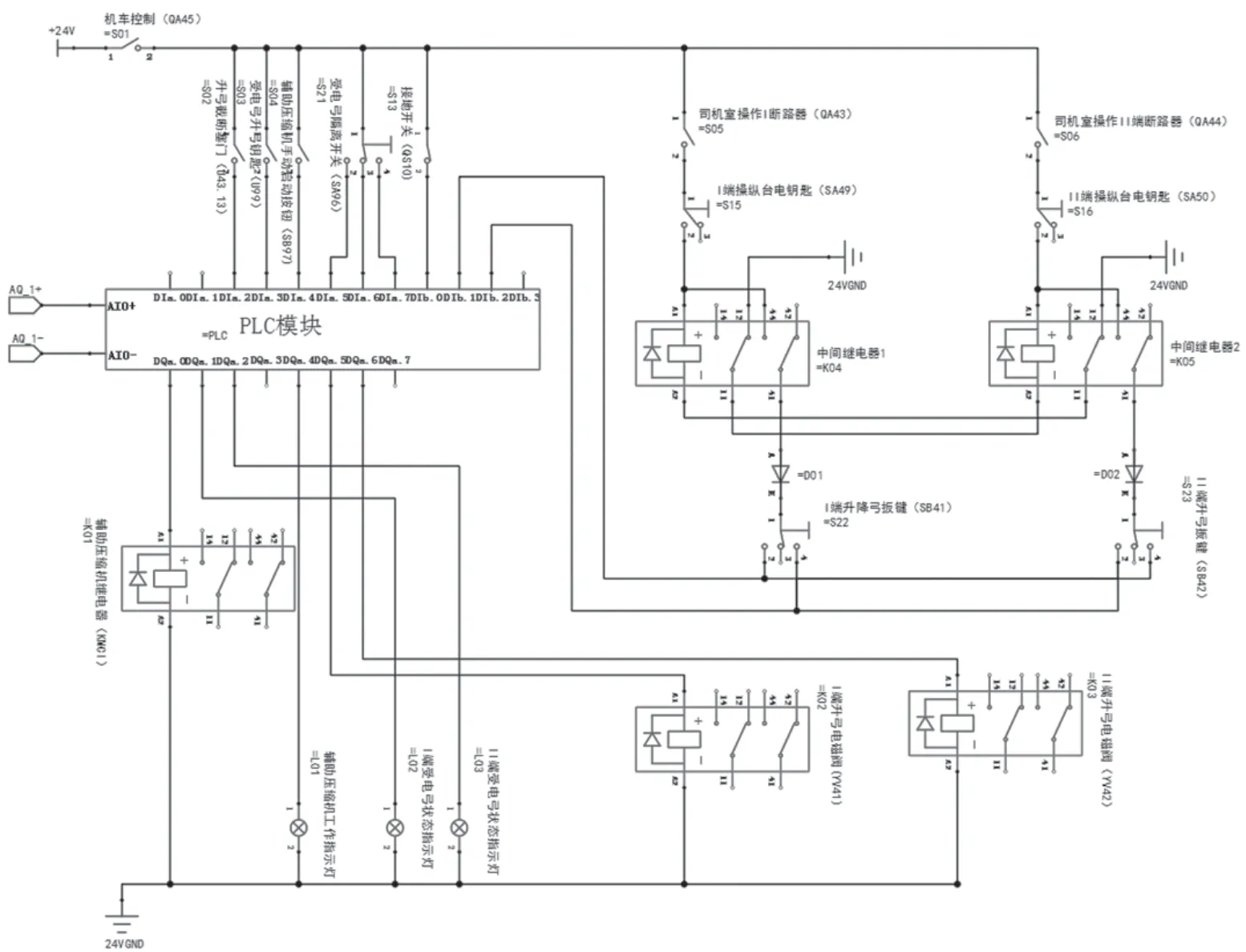
图4 受电弓控制参考电路图
4 结语
基于HXD3C电力机车受电弓升、降控制电路的触摸屏仿真实践教学仿真系统,用软件代替硬件,无需连接受电弓硬件设备,即可模拟仿真多种类型的受电弓升降工的工作过程,虚拟设备动作采用实物动画,动作逼真。同时,该系统应用于HXD3C电力机车受电弓升、降控制电路项目教学,可以丰富教师的教学手段,吸引学员、职工的注意力,提高电力机车受电弓升、降控制电路项目的教学效果,加强学员、职工对PLC理论知识的理解应用。
