自动定向式变电站局放监测定位方法研究
2022-09-15李杰朱胤宇沈丽徐晓琳胡忠明普剑辉
李杰,朱胤宇,沈丽,徐晓琳,胡忠明,普剑辉
(云南电网有限责任公司红河供电局,云南 蒙自 661100)
0 前言
设备若存在绝缘缺陷且不及时检修,最终会导致绝缘击穿、设备突然断电从而致使电力中断,造成较大的损失,且有数据表明,90%的电力故障最初就是源于不同原因的绝缘缺陷[1],而所有缘由的绝缘缺陷都会发生局部放电,因此对运行设备进行局部放电监测,及时发现局部放电信号,尽早对缺陷进行检修处理,可以有效避免绝缘击穿故障的发生[2]。
近些年来,所提出的局部放电现象的监测方法主要有通过光纤传感器检测电弧光实现[3],基于声发射(acoustic emission,AE)法实现[4]以及应用较多的通过检测局放辐射的超高频段(300~3000 MHz)电磁波信号来监测局部放电的特高频(ultra-high frequency, UHF)法[5-8],且有研究证明其具有较好的监测效果[9]。在线监测常采用“到达时间差”(Time Difference of Arrival,TDA)法进行局放定位[10],其主要思路为比较安装于不同位置的传感器接收到信号的时间来确定局放发生的位置,研究的不同点在于其传感器的安装以及如何获得、处理所获得的时间差信号来定位局放源。相关学者提出将四通道的天线阵列作为传感器,再采用牛顿迭代法、搜格法等方法求解时差方程[11]。其中,通过搜格法与粒子群优化算法求解时差方程的实质是求解相应误差方程最小值,并在预设范围内搜寻相应的坐标,但是此种方法计算效率较低[12]。平面相交定位法被提出同样可用于局放定位:首先通过插值互相关法获得天线阵列之间的时差,再通过平面相交法求解时差方程,并通过统计选择定位结果中出现概率最高的位置作为最终结果。但是此方法实现较高精度监测需满足一定限定条件:局放源与天线阵列的间距与夹角均需较小[13]。
上述特高频法的局放监测方法中,传感器安装采用的大多为固定的天线阵列,装置只可实现天线阵列所在平面内的监测,限制了局放监测的监测范围,这也导致一些较优质的算法需在一定前提下才可实现高精度的局放监测。
为此本文提出一种自动定向的局放监测定位装置,由舵机与步进电机实现天线阵列的多维度信号监测,并提出装置适用的UHF信号判别算法与局放源定位算法,实现自定向、高精度、大范围的局放监测及定位,最后通过实验验证了所述方法的可行性。
1 局放监测装置设计
图1为变电站局放监测定位装置的示意图,其中t1~t4为局放源发出的电磁信号被四支天线接收所需的时间,舵机、步进电机与天线阵列是自动定向装置的主要组成部分。当变电站内的电气设备产生局部放电时,辐射出的UHF信号可被天线阵列的四支天线接收到。信号采集控制器同步采集经信号放大、滤波处理后的四通道信号,并将采集所得的电磁波信号转换为相应数字化波形,再进行UHF信号识别,并在识别到缺陷产生的UHF信号时,信号采集控制器控制报警电路发出警报。根据同一局放信号到达各天线的时间差,利用局放监测定位算法得到传输给步进电机与舵机的控制信号,使天线阵列旋转至正对局放源的位置,并利用激光头指示局放源的方位,实现局放直接定位的功能,装置结构框图如图2所示。

图1 变电站局放监测定位装置结构图

图2 变电站局放监测定位装置结构框图
步进电机与舵机是实现天线阵列多方位检测UHF信号的关键机械结构。步进电机可以实现360°的旋转,固定于步进电机输出轴的舵机本身可以随步进电机输出轴旋转。通过在舵机的摆臂上加接一个机械杆,舵机可以实现纵向180°的转向。此二者的旋转在三维坐标系上的体现如图3所示,步进电机实现xOy平面上α角度的旋转(0°<α<360°),舵机则实现xOz平面上β角度的旋转(0°<β<180°),从而使天线阵列可以指向任意方向。
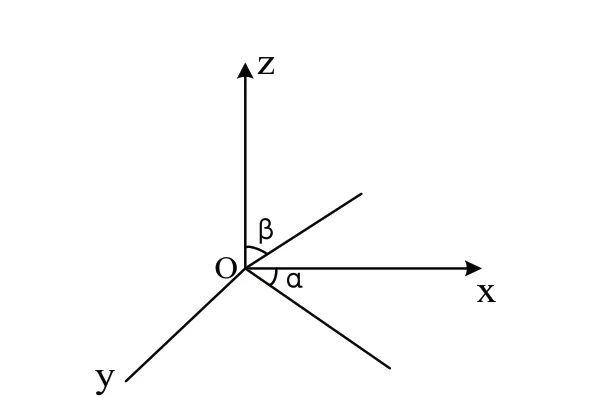
图3 步进电机与舵机的旋转效果图
2 局放监测定位算法
系统定位算法流程如图4所示,信号采集控制器将经信号放大与信号滤波处理后的信号转换为数字波形并对四通道数字波形的时间差进行分析判断:若任意两个数字波形间的时间差均为零,此处所述的零为理想情况下的时间差,实则控制于误差允许范围内即可,在此预设阈值T,若时间差均在T以内,可以说局放信号在误差允许范围内同时抵达四支天线,则此时打开激光头,激光所照处即为局放发生处;若时间差大于T,信号采集控制器传输控制信号,令步进电机、舵机分别转动Δα、Δβ角度,驱使局放源的位置近似正对天线阵列的正中央。经过重复采样、分析、计算、输送控制信号直至UHF信号时间差在T以内,此时控制激光头开启,指向局放所在位置,实现局放源的定位。
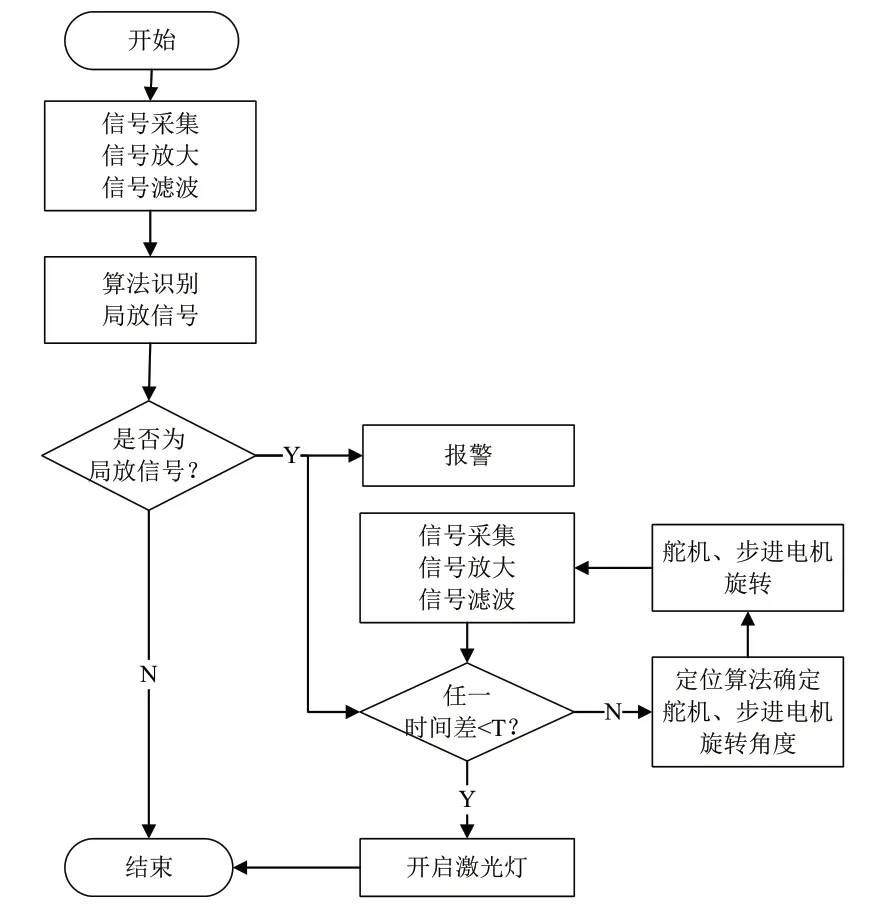
图4 变电站局放监测定位装置工作流程
2.1 UHF信号识别
由于天线阵列采集的脉冲型随机干扰信号较难区分消除,在局部放电图形分析模式下,选择以图形的方式充分展现多种干扰信号,并根据各种干扰和真正局部放电脉冲的特征区分两者[14-15]。如图5所示,信号采集控制器将4支全向天线采集到的电磁波信号转换为各个数字化波形,通过分析、比较图形与必要的处理,判断采集到的脉冲信号是否为局放信号:对于具有固定相位的脉冲干扰,通过分析信号的脉冲幅值在每个正弦周波上的分布,在N-Φ、N-Q-Φ的统计上展现出单个的次数峰值,在Q-Φ-t上展现出整齐的排列;对于与正波电压相位有时间相关规律的干扰脉冲,分析相位、时间的关系,在Q-Φ-t三维图谱上呈现出椭圆形、圆形、S形、斜线型等有规律的图形;对于随机出现的干扰脉冲,由于出现的相位、幅值、次数的不确定性,图形往往相位杂乱,可通过N-Q-Φ三维图谱区分。
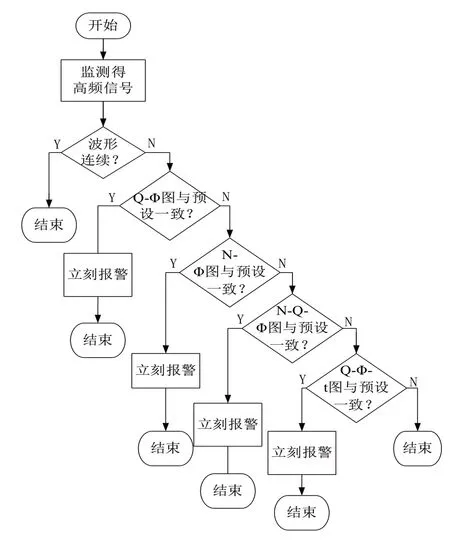
图5 信号判断流程
2.2 舵机旋转角度的确定
以舵机旋转角度Δβ的计算为例进行说明,步进电机旋转角度Δα的计算同理。在如图6所示的纵向投影图中,实线表示当前时刻的投影位置关系,b为局放源S与天线阵列AB边的投影距离,a为局放源S距天线阵列CD边的投影距离;虚线图表示的是天线阵列纵向旋转θ角度后局放源位于中心时的投影图,此时局放源与天线阵列中心的连线应垂直于阵列投影,且局放源距天线阵列AB边与CD边的投影距离m应相等,记天线阵列边长为L,具体计算如下:

图6 天线阵列与局放源的纵向投影图
根据几何关系,b、a分别为ΔSAB、ΔSCD的高,可由海伦公式求出SΔSAB、SΔSCD:
其中,c为电磁波的传播速度,c=3×108m/s。
则a、b可由式(3)表示:
由于a、b的变化率相同,且a+b=2 m,局放源至阵列中心的投影距离h可由式(4)表示:

根据余弦定理可得式(5):

将两式相减即可得转动角度θ的表达式:

角度θ即为舵机顺时针方向上所需旋转的角度,即Δβ=β-β0=-θ,其中β0代表舵机当前旋转的角度,β代表舵机旋转后的期望角度。
由此即得到了舵机所需旋转的角度,同理可以得到步进电机所需旋转的角度Δa,从而信号采集控制器可以输出的控制信号以控制舵机与步进电机运动,并由舵机与步进电机协同调节天线阵列的指向,完成一次自动定位操作。
3 局放监测模拟实验
为了验证所述局放监测装置与方法的可行性,搭建变电站局放监测及定位装置实验平台,包括局放模拟器、电机与天线阵列组成的自定向装置、高速示波器等。天线阵列为正方形布置方式,轮廓边长L=4 m,如图7所示。

图7 局放监测模拟实验装置
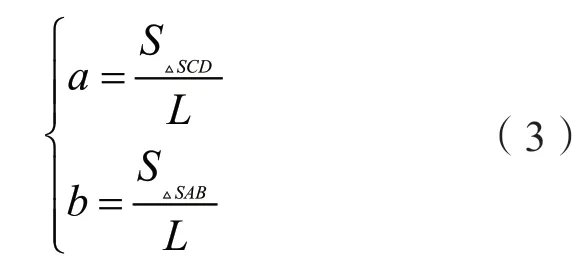
在天线阵列四周随意放置局放模拟器,利用示波器采集天线接收到的UHF信号,采样率设置为5GHz,可得到以下波形:图8所示为局放模拟器发出信号即局放产生且未调整天线阵列指向时两支全向天线所接收到的UHF信号,由波形图可以明显看出两个信号之间存在较大的时间差,需要对天线阵列指向进行调整;在信号采集控制器控制自定向装置完成天线阵列指向的调整,即控制信号时间差在预设阈值T以内后,两支全向天线所接收的信号波形如图9所示。通过两幅图的对比可以看出,所述定位方法将493.6 ns的时间差缩短至8.0 ns,明显缩短了信号时间差,实现了使信号的时间差控制在时间阈值T以内,从而使局放源正对天线阵列,激光灯的指示可靠,实现了实时准确定位。

图8 指向调整前两支全向天线接收的信号波形
图9 指向调整后两支全向天线接收的信号波形
4 结束语
针对现在变电站局放监测定位装置只可实现一个空间平面内的局放监测的不足,本文提出了一种可以实现监测定位三维空间内的局放源的自动定向装置,装置通过步进电机与舵机调节天线阵列指向,使得阵列可指向三维空间的任意方位,并在调整后使用激光灯指示局放源所在位置,从而实现局放监测及定位。另外本文还提出了适用于该装置的局放监测定位算法,首先对天线所接收到的信号在N-Q-Φ等图谱中进行判别以得到UHF信号,再根据空间几何关系分别确定舵机与步进电机所需旋转的角度从而输出相应的控制信号,并通过闭环多次反馈调节来提高控制精度。最后在实验室条件下模拟了局部放电现象,结果表明所述装置和方法可以有效监测到局放信号并能实现准确定位,验证了此方法实现局放源定位的可行性与可靠性,为局部放电监测的发展提供了一个新思路。