基于分层控制的电动汽车复合制动方法
2022-09-14王志新李彦晶
王志新,李彦晶,赵 峰
(1.甘肃交通职业技术学院 汽车工程系,甘肃 兰州 730070;2.兰州工业学院 汽车工程学院, 甘肃 兰州 730050;3.潍坊市特种设备检验研究院,山东 潍坊 261100)
电动汽车具有再生制动和机械摩擦制动两个制动系统,制动时要保证汽车行驶至坡道结束时摩擦制动的制动系在制动末期还具有足够的制动性能。机械摩擦制动系统是在制动过程中将车辆的动能通过摩擦消耗,从而达到减速目的,其优点是制动功率高,但该过程中摩擦制动器制动功率会随着热积累的增加不断下降,最终摩擦制动器制动失效会引发安全问题。电动汽车再生制动系统是车辆在制动过程中利用倒拖电机发电,并将电能储存到电池中,从而提升纯电动汽车的续航里程,增加了电动汽车的能量利用率。但再生制动系统同时也改变了汽车前后轴制动力分配比例,对电动汽车制动效能和制动稳定性存在一定影响。
目前针对纯电动车复合制动,曹秉刚等以电机再生制动控制方法、电池特性和电机特性为研究对象,运用最新现代控制理论方法,设计控制策略,明显提升制动能量回收效率[1];王军等建立纯电动客车制动能量回收系统,在考虑整车制动稳定性的基础上提出“分段复合”策略,提升制动能量回收率[2];郭金刚等在复合制动系统的基础上,提出了主、辅电源能量回馈系统,实现回收能量对主辅电源充电[3];周云山等采用理想制动力分配,对前、后轴再生制动力与机械摩擦制动力进行二次分配,优化了整车控制策略[4]。通过分析,以上研究主要集中于提出优化复合制动控制策略以提高车辆制动系统性能,但未将驾驶员操纵因素以及道路因素纳入到制动控制的考虑范围之内。
本文以某纯电动汽车为研究对象,提出分层架构的复合制动系统,建立制动意图识别模型,以电动车电池特性、电机和制动力优化分配为约束条件,建立了基于制动意图识别的复合制动控制模型,制定复合制动控制策略,并运用系统仿真,以验证控制策略的有效性。
1 系统总体结构
电动汽车制动过程中综合考虑操纵稳定性、安全性和再生制动能量回馈效率,以及制动控制系统的复杂性和功能的独立性,建立分层架构的复合制动控制系统[5]。
该控制系统由3层组成,其中上层为感知层,融合车辆状态信息、道路环境信息、驾驶人操作信息,计算需求纵向制动转矩和横摆力矩。中层为决策层,将来自上层的横摆力矩值和驾驶人期望纵向力矩进行分配,依据各制动轮制动力分配约束条件,优化分配制动力到前后轴及各个车轮[6]。下层为控制层,控制电机制动与摩擦制动的匹配及车轮滑转率,分层架构的电动汽车复合制动控制系统架构模型如图1所示。
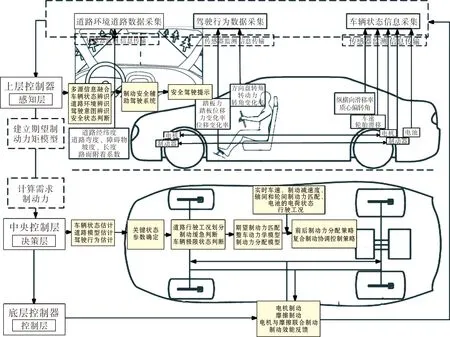
图1 分层控制系统架构模型
复合制动系统中电机制动主要由电机、动力电池以及电机控制器、整车控制器等组成。摩擦制动包括机械制动器、真空助力器和液压助力器。各个系统之间独立工作,其状态信息通过CAN总线形成交互,并汇总至整车控制器(VCU),整车控制器根据车辆运行状况,以及每个制动子系统的状态,进而分析对复合制动系统中每个子系统输出的制动力进行动态协调[7],电动汽车复合控制制动系统结构如图2所示。
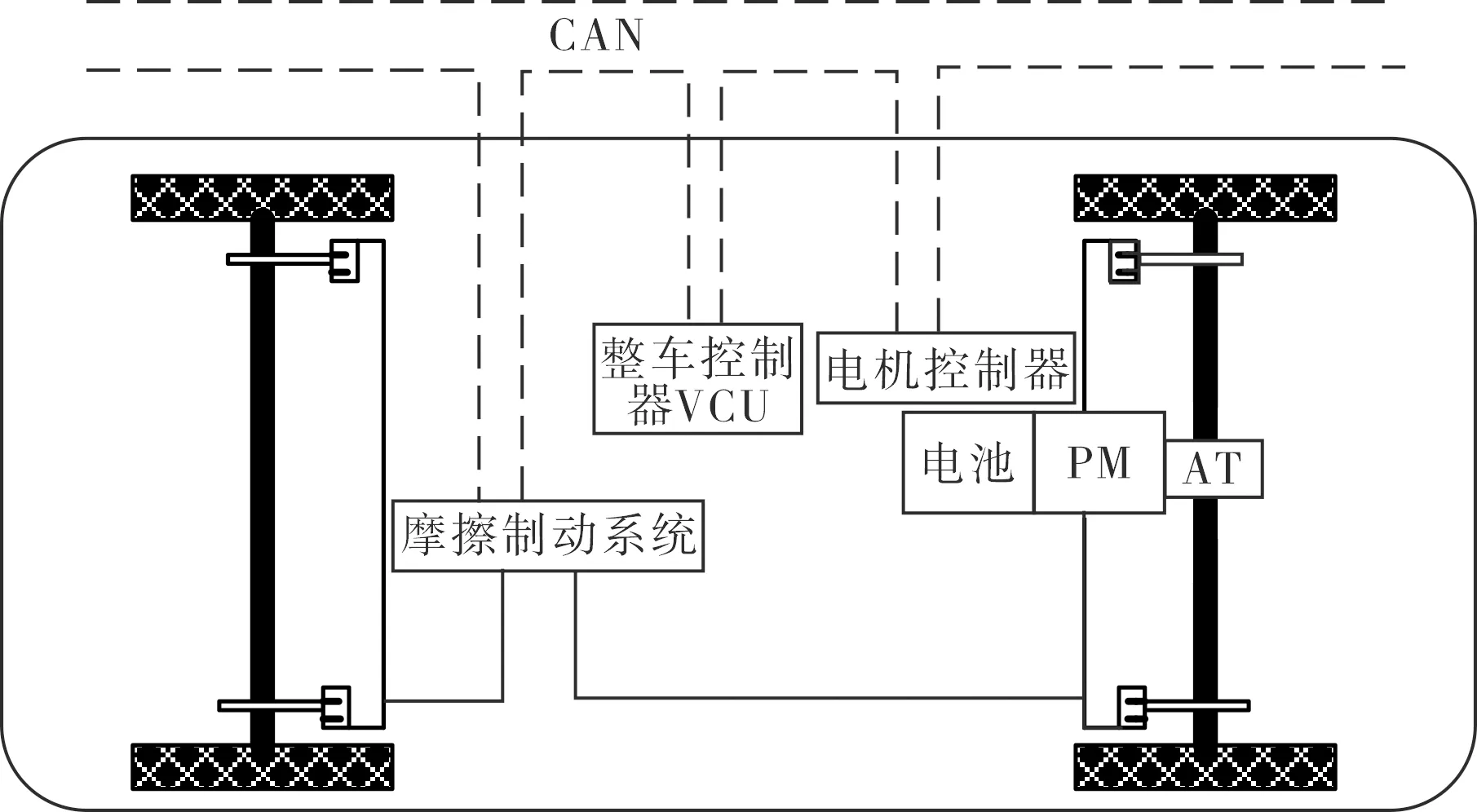
图2 电动汽车复合制动系统结构
2 构建制动驾驶意图的识别模型
制动操纵行为在时间上的组合反映了当前驾驶人根据驾驶环境所产生的驾驶意图[8]。复合制动过程中,驾驶员制动意图属于较长时间的复杂事件,因此需将一段时间内的制动过程,分割成持续时间较短的单一事件[9]。由于踩下制动踏板阶段的时间过短不利于获得此过程的特征,同时整个制动过程中制动踏板保持阶段的数据较为平稳,占整个制动时间的一半以上,因此,在制动保持阶段进行驾驶员意图辨识可以有效改善模型的辨识效果以及驾驶人制动意图识别速度,以此建立底层紧急制动模型、正常制动模型、缓慢制动高斯混合隐形马尔科夫GHMM模型,模型如图3所示。
O(t)={a(t),b(t),c(t)},
(1)
式中:a(t)为制动踏板位移;b(t)为制动踏板位移变化率;c(t)为制动踏板力。
通过对采集到的数据进行预处理,利用T-test假设检验剔除异常数据,利用高斯聚类方法截取训练数据,应用Baum-Welch算法中的递归思想,确定并迭代优化制动GHMM模型λ的各参数,λ可以描述为
λ=(Л,A,B).
(2)
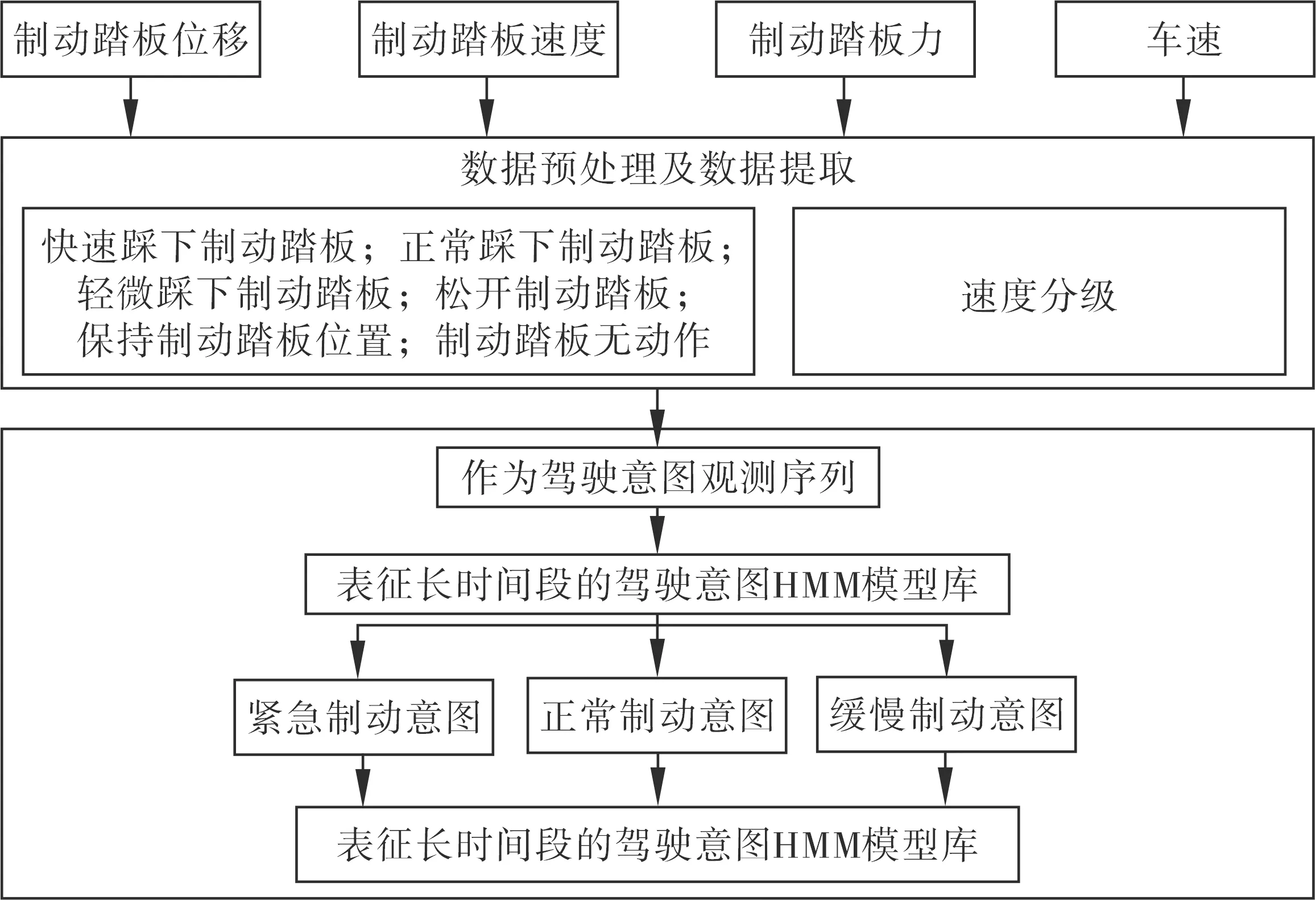
图3 制动驾驶意图模型结构
GHMM模型参数优化完成后,将采集到的各传感器数据,如制动踏板位移传感器、速度传感器、力传感器、车速传感器,分别送到驾驶意图识别模块中,运用前向—后向算法计算每个模块的GHMM 相对于当前序列产生的可能性,以概率最大的模型作为当前驾驶员行为,高斯混合隐形马尔科夫模型结构的训练过程如图4所示。
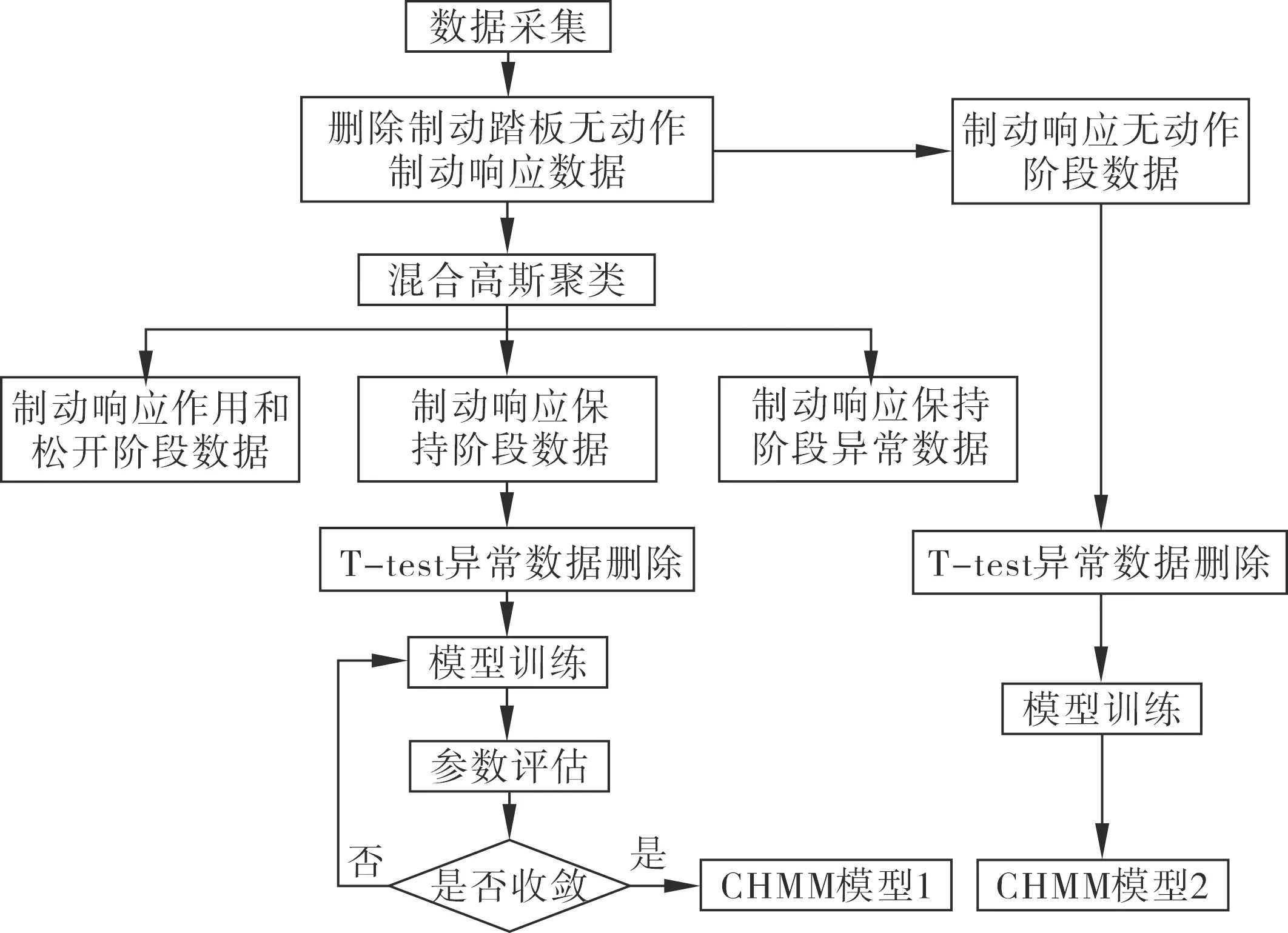
图4 GHMM结构训练过程
3 电动汽车复合制动控制策略
电动汽车复合制动控制策略制定需要依据车辆复合制动系统的结构特点,结合车辆制动力学特性、制动力分配特性、电机和蓄电池等因素的影响,从而在保证车辆稳定性、制动性能的前提下,又要最大限度地提高制动能量回收率[9]。
3.1 制动力分配约束条件
当电动汽车制动时,复合制动系统制动力主要依靠电机控制器和液压控制器分别控制输出电机制动力和摩擦制动力,电机制动力来源于车轮的惯性倒拖电机转动,在转换动能发电的基础上,产生阻碍力矩形成制动力[10]。汽车在制动时阻力合力F为
东亭的人们此时才发现,其实不光去东湖难,去博物馆去美术馆以及上东湖路,都不再容易。快速路把所有进出路口都封死,整条马路只有东湖宾馆出行方便。东湖宾馆是贵地,以前毛主席喜欢住在这里。中央客人和省里官员也都喜欢住在这里。路是为他们修的。东亭满街哗然过后,便只有沉默。
F=Ff+Fw+Fb,
(3)
式中:Ff为滚动阻力;Fw为空气阻力;Fb为车辆的制动力。
Fb(前后轮)的制动力合力计算如式(4),即
Fb=Fbf+Fbr,
(4)
式中:Fbf为前轮制动力;Fbr为后轮制动力,且分别为各自摩擦制动力和电机再生制动力之和,即:
Fbf=Fbf_mri+Fbf_reg,Fbr=Fbr_mri+Fbr_reg,
(5)
式中:Fbf_mri为前轮摩擦制动力;Fbf_reg为后轮摩擦制动力;Fbr_mri为前轮电机再生制动力;Fbr_reg为后轮电机再生制动力。
电动汽车在制动时为防止失去转向能力、跑偏和侧滑,参考《ECE-R13号法规》对车辆前后轴制动力的限制要求,按照立项制动器制动力分配曲线对前后轮制动力进行分配,具体分配如式(6)~(11)。
(6)
(7)
(8)
(9)
(10)
(11)
式中:L1、L2分别为质心距前轴和后轴的距离;L为轴距;φ为附着系数;h为质心高度;M为汽车总质量;g为重力加速度;β为制动力分配系数;z为制动强度。
3.2 电机制动约束条件
电机制动时,电机制动力矩与发电功率、转速有如下的关系,即
(12)
式中:Treg为电机制动力矩;Tmax为电机最大转矩;n为转速;nN为额定转速;nm为最高转速;P为最大功率;η为发电效率。
电机转速过低时,再生制动力矩接近0,因此为保证制动安全性,将300r·min-1设置为电机再生制动转速阈值。
3.3 蓄电池约束条件
电机再生制动回馈的电能最终要存储到蓄电池中,因此为了保证蓄电池使用的安全性和寿命,应根据SOC限制再生制动最大充电电流,蓄电池对再生制动的约束为
(13)
式中:Ireg为再生制动充电电流;Iregmax为蓄电池最大允许充电电流。
3.4 复合制动控制策略
根据需求制动力矩Tb、制动踏板位移和制动踏板位移变化率、以及车速进行制动意图识别,如果判断出为轻度制动时,由于制动强度普遍较低,电机制动力矩能够满足总需求的制动力矩,则由电机再生制动提供总制动力;否则根据约束条件后轴制动力矩由电机再生制动力矩提供,不足部分由前轴机械制动补充制动力矩,大小为Tb-Treg。如果判断出制动意图为中度制动时,前轴制动力由机械制动提供,后轴制动力优先采用电机制动,根据制动力分配曲线和约束条件分别计算出后轴需求制动力矩Tr和再生制动力矩Treg,当Tr
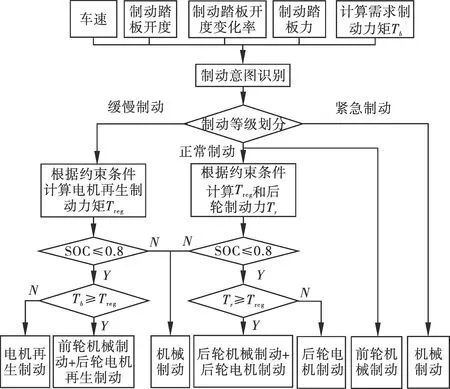
图5 电动汽车复合控制策略
4 制动工况仿真及结果分析
利用Matlab设计的复合制动控制策略模型如图6所示,复合制动控制策略模型由制动意图识别模块和制动力分配模块两部分组成,输入值包括加速度a、蓄电池SOC、车速v和制动踏板位移S四个信号,经制动意图识别模块预测分类,制动力分配模块以此完成各轮制动力下的调节以及电机制动力的分配。
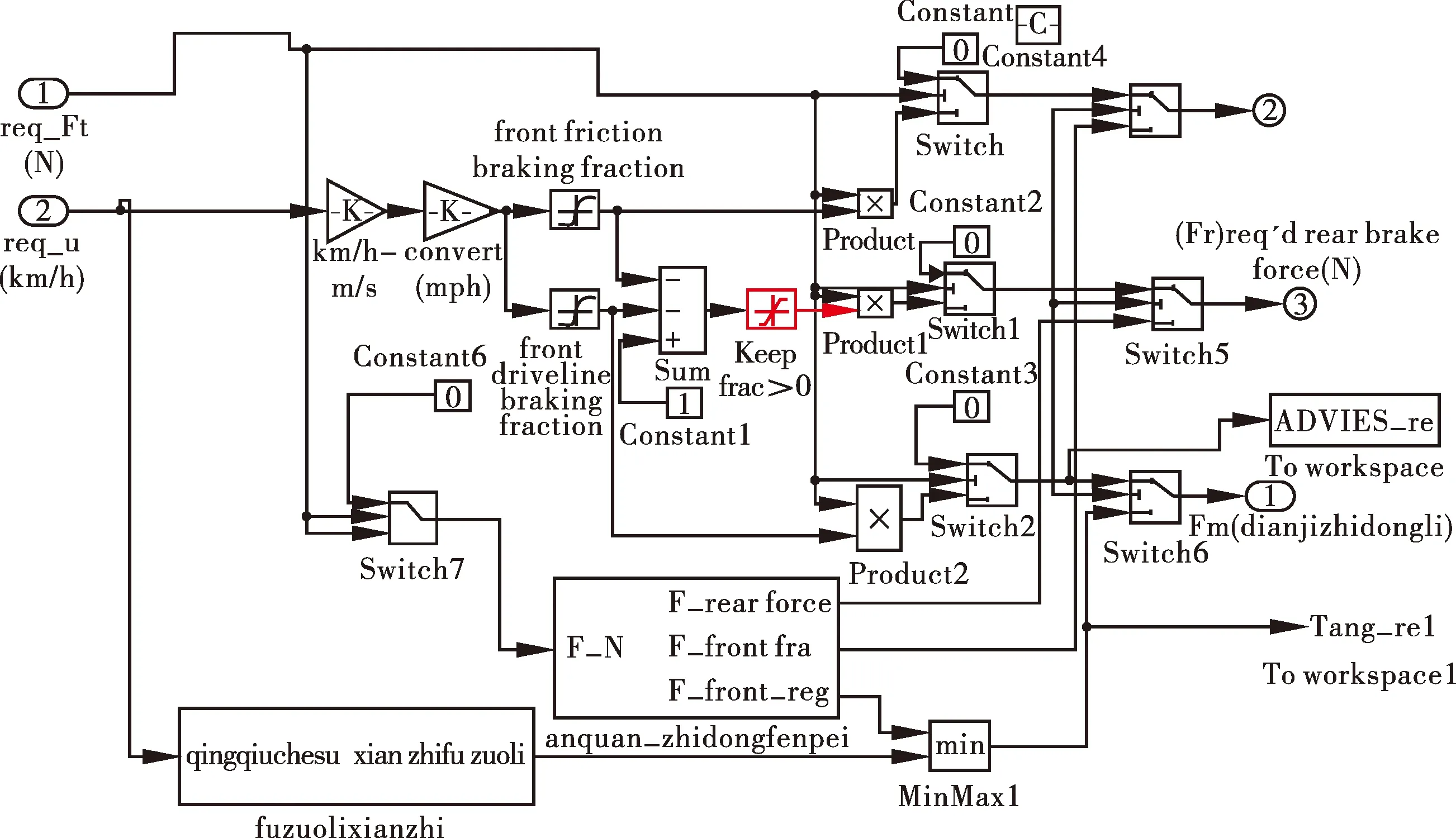
图6 复合制动控制策略模型
依据标准试验要求,设定初始SOC=80%、初始车速60 km/h,制动强度z为0.1、0.3、0.5、0.7、0.8时的5种工况进行缓慢制动、正常制动和紧急制动性能仿真,并将不同制动强度下仿真得到的车速、制动距离、制动结束时刻蓄电池SOC、回收到蓄电池的能量进行对比,仿真结果如表1所示。
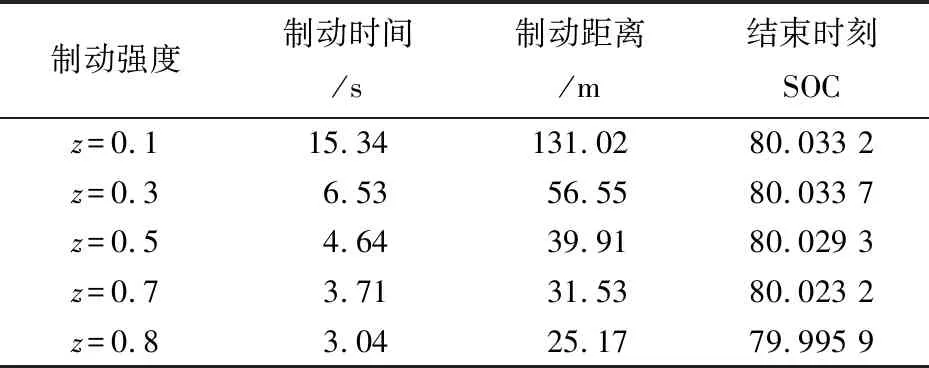
表1 5种工况下的车速制动性能对比
通过表1可知,在60 km/h初始速度下制动时,随着制动强度的增加,制动时间和制动距离均随之减少,另外,在高制动强度(z=0.7和z=0.8),即紧急制动时,车辆的制动时间和制动距离均能够满足制动安全性要求。
选取典型城市道路循环工况验证复合制动控制策略的作用效果,通过对比有制动意图识别策略与无制动意图识别策略的结果检验控制策略在循环工况中的性能,电动汽车的初始SOC值设定为50%。仿真结果如图7和表2所示。循环结束时采用本文复合制动控制策略比无制动能量回收控制策略的蓄电池SOC值高出0.36%,复合制动控制策略能够回收385 kJ能量,制动能量回收率达到了12.87%。基于驾驶意图识别的复合制动控制策略能够在循环工况中快速准确识别制动意图,能够更有效地降低能量消耗,提高了制动能量回收率,改善了整车经济性。
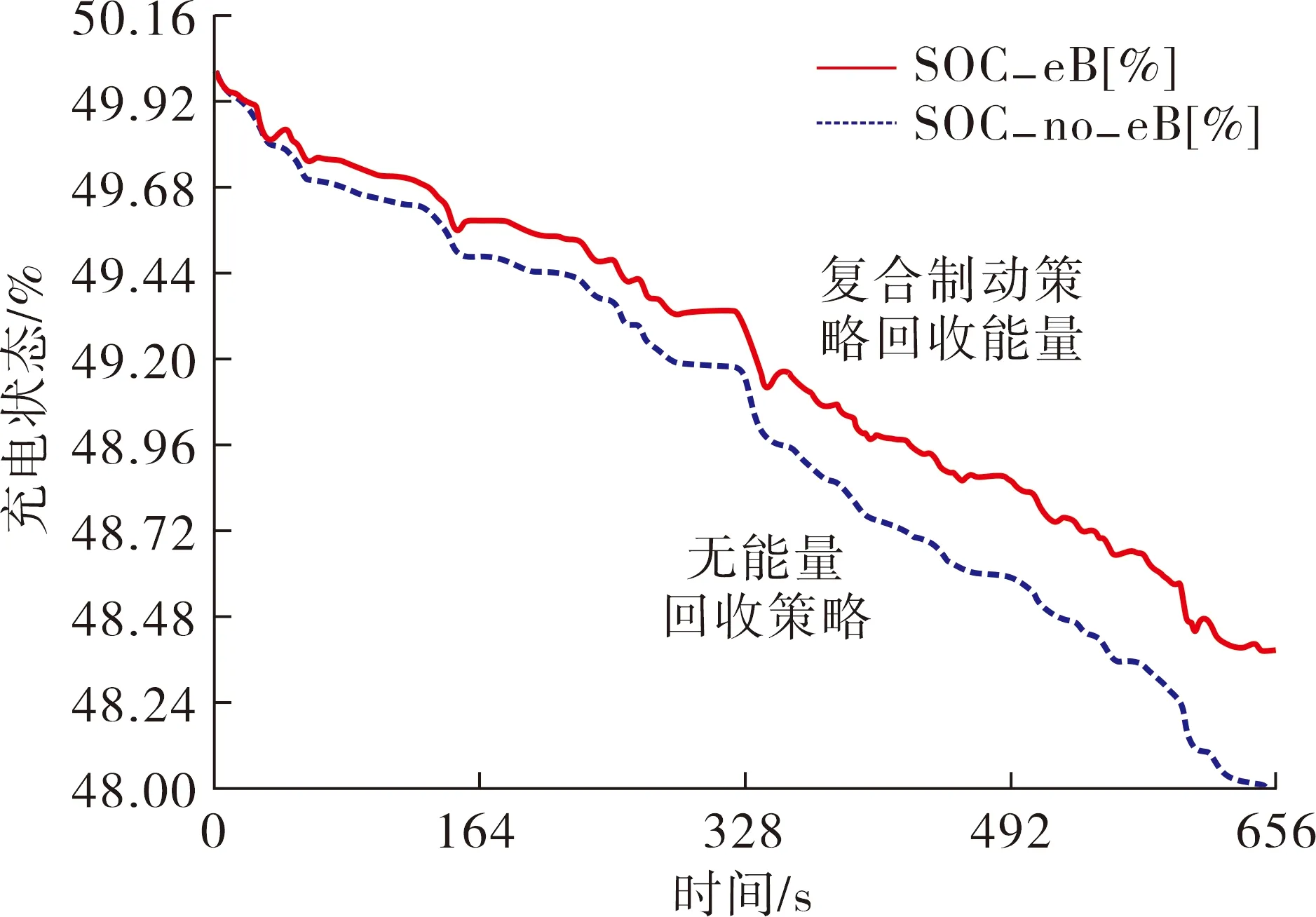
图7 不同制动策略SOC变化
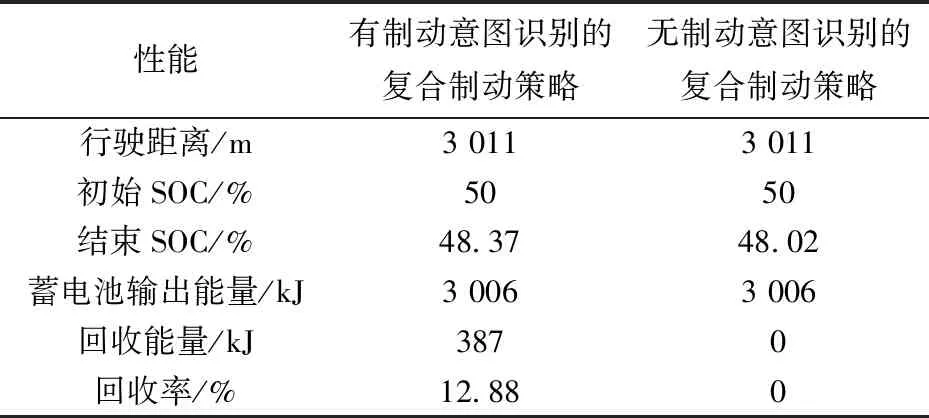
表2 不同制动控制策略下性能对比
5 结语
本文以某电动汽车为研究对象,首先设计搭建了分层架构的复合制动系统,建立了驾驶意图识别模型;其次基于驾驶意图模型和车速,以及制动力分配约束、电机特性约束以及蓄电池特性约束,制定了基于驾驶意图识别的复合制动系统控制策略;最后应用仿真软件对复合制动控制系统分析。试验结果表明,基于驾驶意图识别的复合控制策略能在多种制动工况下有效稳定的工作,在保证安全稳定的基础上,提高制动能量回收利用率,增加车辆的续航里程,提升车辆经济性能。
