基于六旋翼的水质采样无人机设计与实现*
2022-09-14刘小军温宏愿陈梓标
刘小军,温宏愿,刘 超,陈梓标,宋 涛
(1.南京理工大学泰州科技学院 电子电气工程学院,江苏 泰州 225300; 2.南京理工大学泰州科技学院 智能制造学院,江苏 泰州 225300)
0 引 言
随着我国社会经济的快速发展,环境问题特别是水质污染问题,越来越得到国民的重视。近年来由重金属和化学品引发的地表水污染事件不时出现,严重威胁人们的生命和财产安全[1]。当水质污染事件发生时,必须快速准确找到污染物源头,并适时采样进行定性或定量的研究,这在一定程度上提高了水质检测应急处理的技术要求。
在复杂的工作环境下,传统的人工检测存在灵活性差、危险系数高等缺点;采用无人船替代人工可实现远距离水质采样检测,实时移动追踪污染源[2-3],但同时也存在诸如水面有大量障碍物、急速水流时无法到达检测地点的情况。
多旋翼无人机具有结构简单、机动性好、操控方便、作业选择性强等特点,广泛应用于农业[4]、林业[5]、地形测绘[6]、电力[7]、灾害监测及环境监测[8]等领域。笔者设计了一种基于六旋翼的水质采样无人机,该系统将采水装置和机载相机搭载于无人机平台上,可实现高效、可视化水质采样作业,旨在为今后水质采样无人机的设计提供一定的借鉴作用。
1 总体设计方案
根据水质采样作业要求,多旋翼无人机需要能够轻松承载水质采样器和水样,且在水面上方低空稳定飞行、持续作业。多旋翼无人机一般分为四轴、六轴和八轴无人机[9],六旋翼无人机相比于四旋翼无人机具有稳定性能高,抗风性能好的优势;相对于八轴无人机来说,在载荷相同的条件下,六旋翼无人机单次起降能够完成更多的作业任务。水质采样无人机需要载重1.5 L的采样水,在续航能力、稳定性以及抗风性的综合考虑下,决定选用六旋翼无人机作为飞行平台。
基于六旋翼的水质采样无人机实物如图1所示。基于六旋翼的水质采样无人机总体设计框图如图2所示。该系统主要由六旋翼无人机和水质采样装置两个子系统组成。其中六旋翼无人机主要由机架、动力系统、飞行控制系统、云台相机等部分构成,负责按要求飞到指定的水质采样地点;水质采样装置主要完成水质采样任务。

图1 六旋翼水质采样无人机实物图

图2 系统总体设计框图
无人机作业时,操作员使用地面站将飞行控制指令通过2.4 GHz无线通信方式发送给接收机,接收机将控制信号发送给飞行控制系统,飞行控制系统根据接收到的信号、姿态解算结果和控制算法计算出电机转速控制量,并将控制量通过电子调速器转换成相应的三相电压值,进而控制直流无刷电机的转速,达到灵活控制无人机飞行的目的。当无人机飞到指定位置时,悬停于水面上方指定高度,操作遥控器的拨杆控制水质采样装置进行水质采样作业,同时云台相机传输视频,方便操作者观察水面作业情况。在整个作业过程中,可以通过地面站实时监控无人机的飞行情况。
2 六旋翼无人机设计
使用 SolidWorks 进行机械结构三维设计仿真,根据设计要求,为了确保飞行的稳定性,以及大载荷下机械机构的可靠性 ,设计的六旋翼水质采样无人机机械结构示意图如图3所示。
从图3可知,六旋翼无人机零部件主要由机架中心板、机臂、链接件、电机机座、锂电池、GPS模块、飞行控制器、螺旋桨、无刷电机、电子调速器(简称“电调”)、接收机和起落架等构成。机臂、电机和螺旋桨以正六边形方式均匀地分布在无人机周围,电机安装在电机机座上。

图3 六旋翼无人机结构示意图1.机臂 2.电子调速器 3.中心板(下板) 4.链接件 5.中心板(上板) 6.锂电池 7.GPS模块 8.飞行控制器 9.螺旋桨 10.电机机座 11.接收机 12.无刷电机 13.云台相机 14.起落架
2.1 机架设计
机架中心板选用高强度碳纤维材料,由上中心板和下中心板构成,上、下中心板分别通过24个螺纹孔连接六个机臂折叠件的上下端进行固定。上、下中心板之间形成镂空[10],用于放置电子调速器、电源模块以及各单元连接的导线部分。上、下中心板通过雕刻加工设有众多圆孔和直槽口,用于飞行控制器、锂电池、GPS模块以及水质检测装置的固定,此结构可以减轻机架中心板重量,且有助于通风散热。
此外,无人机进行负载作业时,整体机架必须具备足够的承载力和结构强度,才能达到飞行的稳定性和耐受力。机臂由于其特殊的结构,承受的作用力最大,有必要对机臂部分进行强度校核。机臂采用主流的碳纤维管材质,其应力大小σ为7 GPa,所以水质采样无人机的机臂所承受的最大应力大小应小于7 GPa。对整个等截面杵件来说,弯矩产生了水平面弯曲,最大正应力发生在弯矩最大的截面上,也就是边缘点位置。由应力计算公式(1)~(3)可计算出应力大小:
(1)
(2)
(3)
式中:直径D为20 mm,壁厚d为2 mm,Mmax表示满载重量,大小为8.30 kg,WZ表示抗弯界面系数。
本设计采用直径15英寸的螺旋桨,为了使螺旋桨的工作效率最大化,相邻桨叶间应留有100 mm距离[11],六旋翼无人机相邻臂长的角度为60°且臂长相等,计算得到理论机臂长度为481 mm,考虑机臂安装位置距离中心板中心点约100 mm,实际机臂长度设计为381 mm,符合设计要求。
2.2 动力系统设计
动力系统主要包括锂电池、电调、电机和螺旋桨等部件,给无人机稳定飞行提供足够的动力,对水质采样无人机的带载作业有着决定性的作用,是飞行设计任务中必不可少的一环。
2.2.1 电机选型设计
动力系统设计主要考虑电机所承载的拉力是否满足无人机在最大载荷情况下的稳定飞行。设水质采样无人机的空载重为Mk,采样水重量为Mc,满载条件下的水质采样无人机的总重量为Mmax,每个电机拉力为F,电机数量为N,有如下关系:
Mmax=Mk+Mc
(4)
(5)
水质采样无人机作业时,采样装置和无人机通过吊索连接,有风的情况下会增加作业难度,考虑安全裕量,平均到每个电机的最小拉力满足:
Fmin=(1+α)F
(6)
水质采样无人机的空载质量Mk=6.80 kg,采样水重量Mc=1.5 kg,电机数量N=6,安全裕量因子σ取0.3,根据公式(4)~(6),求得水质采样无人机满载作业时,单个电机所需提供的最小拉力为 1.80 kg,空载作业时,单个电机的最小拉力为 1.47 kg。
无人机作业过程中的拉力大小是根据电机所匹配的螺旋桨共同决定的,结合实际需求,选用kV值为340的飓风4110电机搭配1555螺旋桨。电机参数如表1所列,电机搭配1555螺旋桨在25 V电压下的性能参数列表如表2所列。
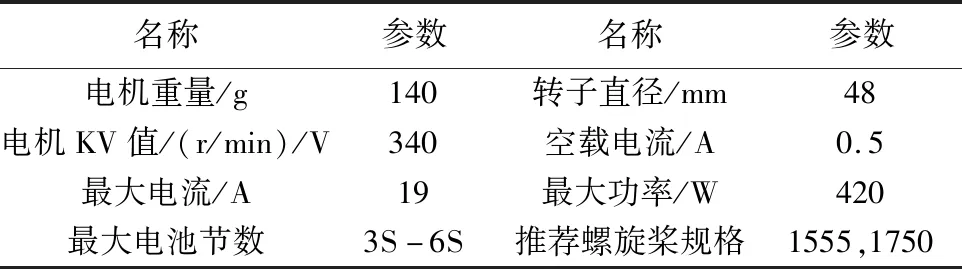
表1 电机参数列表

表2 飓风kV340搭配1555桨在25 V电压下性能参数列表
电调和电机直接相连,驱动和控制电机的方向和转速。由表1可知,电机的最大工作电流为19 A,考虑2倍安全裕量,通常电调的最大电流应大于38 A,选用X-Rotor 40A作为水质采样无人机的电调符合电流的设计要求。
由表2可知,飓风4110 kV340电机搭配1555螺旋桨在25 V电压下的最大拉力为2.33 kg,符合满载条件下的电机拉力需求设计。
2.2.2 电池选型设计
电池续航问题一直制约着多旋翼无人机的行业应用发展,因此在电池的设计中应重点考虑电池的容量大小。水质采样无人机作业时,电量主要为电机所消耗,忽略其他部件电量消耗,电池放电电流If(mA)、单个电机工作电流Is(mA)、电池容量C(mA·h)、水质采样无人机续航时间T(h)满足如下关系:
If=NIs
(7)
C=kIfT
(8)
式中:k为安全因子,取1.3。
由上述所知,水质采样无人机空载时单个电机的拉力为1.47 kg,由表2可知单个电机的工作电流约为8 A,设计的空载飞行时间为0.25 h,由公式(7)、(8)可得容量C为15 600 mA·h;同理,水质采样无人机满载时单个电机的拉力为1.8 kg,单个电机的工作电流约为11 A,设计的满载飞行时间为0.18 h,可得容量C为15 444 mA·h。经计算,选用一块容量为16 000 mA·h、电压为25.2 V的6S格式锂电池给无人机供电,满足无人机满载和空载条件下对电池容量大小的需求。
此外,无人机轴距是无人机结构设计的重要参数指标,轴距与螺旋桨长度的关系如下:
L′=(L×25.4)×2
(9)
式中:L表示螺旋桨的长度;L′表示轴距。
根据公式(9)计算得到六旋翼无人机的轴距至少为762 mm,根据机臂和中心板长度大小,无人机的轴距为 962 mm,满足设计要求。此外,为了降低无人机收起后的宽度,增加运输方便性和外表美观度,采用向下可折叠机臂设计,六旋翼无人机的起落架高度应大于臂长,高度设计为400 mm,起落架的底部设有海绵套,在无人机降落的过程中可以起到缓冲作用。
2.3 飞行控制器选型
飞行控制系统是六旋翼无人机的重要组成部分,承担无人机姿态传感器的检测和结算、数据通信、电机控制等,其中飞行控制器是核心部件。考虑到硬件成本和开源特性,基于Pixhawk开源硬件平台,结合实际需求进行二次开发,采用双处理器架构,分别以擅长强大运算的32bit的STM32F427为主处理器,以故障应对的STM32F103为协处理器,搭载陀螺仪、数字罗盘等外围芯片电路,经飞行测试,性能良好、飞行稳定。
飞控软件采用Pixhawk的原生固件,是专门为Pixhawk设计,包括Nuttx实时操作系统、中间件和飞行控制栈3个基本组成部分[12]。Nuttx嵌入式实时操作系统上采用多线程、模块化设计,主要负责任务的调度和通信;中间件相当于硬件抽象层,提供设备驱动程序和数据传输等;飞行控制栈主要实现六旋翼无人机的姿态解算、自主稳定飞行等。
3 水质采样装置设计
水质采样装置固定在无人机平台上,由控制系统和取水器组成,控制系统包括电机、吊索、线盘等组件,取水器包括容器、限位块、配重块和出水管,容量为1.5 L,结构如图4所示。

图4 水质采样装置结构图 图5 水质采样装置实物图1.电机 2.吊索 3.安装板 4.线盘 5.限位块 6.容器
装置整体材质采用铝合金、碳纤维板以及耐腐蚀性材料制作,由锂电池直接供电,共用无人机遥控器和接收机,支持遥控器接收机 PMW和SBUS类型,设置三段开关即可控制取水器升降。采用全自动上行/下行限位设计,避免过放下行和过收操作失误,确保取水后飞行重心稳定,保证无人机的飞行安全,实物图和设计参数如图5、表3所示。

表3 水质采样装置参数列表
4 试验结果
在完成机械结构、动力系统、飞行控制系统和水质采样装置的设计后,各部件经生产加工、选型并组装成如图1所示的六旋翼可视化水质采样无人机,整体外行尺寸1 152 mm×1 072 mm×451 mm,空载重量6.80 kg。
4.1 空载测试
无人机作业测试前,需对其进行空载飞行测试,确保无人机飞行具有良好的稳定性和操控性,包括油门控制、通信数据链、水质采样装置升降等。测试地点选在校园空旷地带,测试内容包括无人机各模块的正确连接,起飞降落的状态、前后左右升降飞行的操控性、悬停状态的稳定性、无线数据的收发等。
4.2 作业测试
完成无人机空载飞行测试后,接下来进行多点水质采样作业测试,测试地点选择学校内湖。当天天气情况为:最高气温10 ℃,最低气温3 ℃,湿度40%,风力3~4级,属于正常的作业天气。首先进行手动飞行作业,通过遥控器操控无人机到指定的采水地点,待无人机悬停稳定后,拨动开关控制电机放下采水装置,装置进入水下自动采水。通过机载相机,可以实现可视化作业,降低作业难度的同时提升了水质采样的准确性。采水完成后,拨动开关收起装置,控制无人机返回降落点。作业状态如图6、7所示。
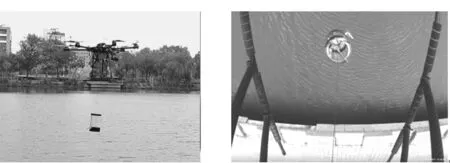
图6 作业实测图 图7 云台相机画面
如遇到飞行距离远、飞行视野不好的情况,可采用自动飞行模式。通过地面站对无人机的飞行轨迹进行规划,借助机载GPS和地图实现自主导航功能,当无人机按照规划路线飞到指点作业地点后,会自动进入悬停状态,然后进行采水作业。
5 结 语
针对突发性水质污染事件发生时,如何快速进行水质采样的问题,提出了一种基于六旋翼的水质采样无人机系统方案,重点对方案的设计及实现进行了论证分析,通过试验验证了将采水装置和机载相机搭载于无人机平台,可实现高效的可视化水质采样作业,该装置具有操控简单、灵活性高等优点,具有一定的实际应用价值。