大蒜播种机调向导种机构研究与试验*
2022-09-14朱玉丽张立娟王国虎
朱玉丽,张立娟,王国虎
(1.平顶山工业职业技术学院,河南 平顶山 467001 2.平顶山安盛机械有限公司,河南 平顶山 467001)
0 引 言
我国大蒜种植面积占到了世界的三分之一,种植地主要集中在河南、山东、陕西、新疆等地,机械化种植普遍很低,人工种植劳动强度大、效率低成本高[1],严重制约了大蒜规模化产业发展。且现有大蒜种植机械存在蒜芽朝上不好保证、准确入土率不高的问题[2-3]。如专利技术产品2ZDS5型大蒜播种机在取蒜、蒜芽方向控制上虽有了突破,但缺乏实际的推广应用缺乏条件[4-5]。山东庆华牌QH-18型大蒜播种机虽已经在推广实施,但整体机型体积庞大,播种周期较短,市场推广价值一般[6-7]。
蒜芽向上入土是大蒜种植的基本农艺要求,由于蒜种形状的不规则,导致蒜芽方向很难定位。而非蒜芽向上的蒜种出芽率低、生长缓慢而且蒜瓣小,影响整体质量[8]。有关实验数据表明,随机种植的蒜瓣的经济价值比直立种植降低50%[9]。为解决这个问题,在调研了现有设备和专利文件后提出了新型大蒜播种机的设计,重点对保证工艺的螺旋状导种管和锥形漏斗接盘关键结构进行研究,得出了组合导种装置的最优结构参数,验证了调向导种装置在解决蒜牙向上种植问题中的可行性。该设备能一次完成调整蒜芽方向、挖掘、下种、覆土的整体作业过程,同时也为机械化收割创造了条件。
1 整体结构组成和工作原理
1.1 设计思路
大蒜播种机关键技术在于蒜种的定向,设计采用独特的螺旋状导种管和漏斗接盘组合结构,在大蒜下落过程中,通过蒜瓣自重和摩擦力在管道中的作用对蒜牙朝向进行一级调整,再经过特殊角度漏斗接盘进行二级调整,最终达到蒜牙朝上的种植要求。通过合理的管路长度和接盘尺寸设计,能很好地解决大蒜播种时蒜芽向上入土的问题。
1.2 结构组成
大蒜播种机利用螺旋导种管机构可以调整蒜芽方向朝上;利用凸轮机构可以防止大蒜种植过程中堵塞问题;采用弹簧种植爪机构进行挖掘、下种、覆土,保证大蒜的直立入土种植。其结构如图1所示。为适应户外作业,采用农用拖拉机带动大蒜播种机工作。
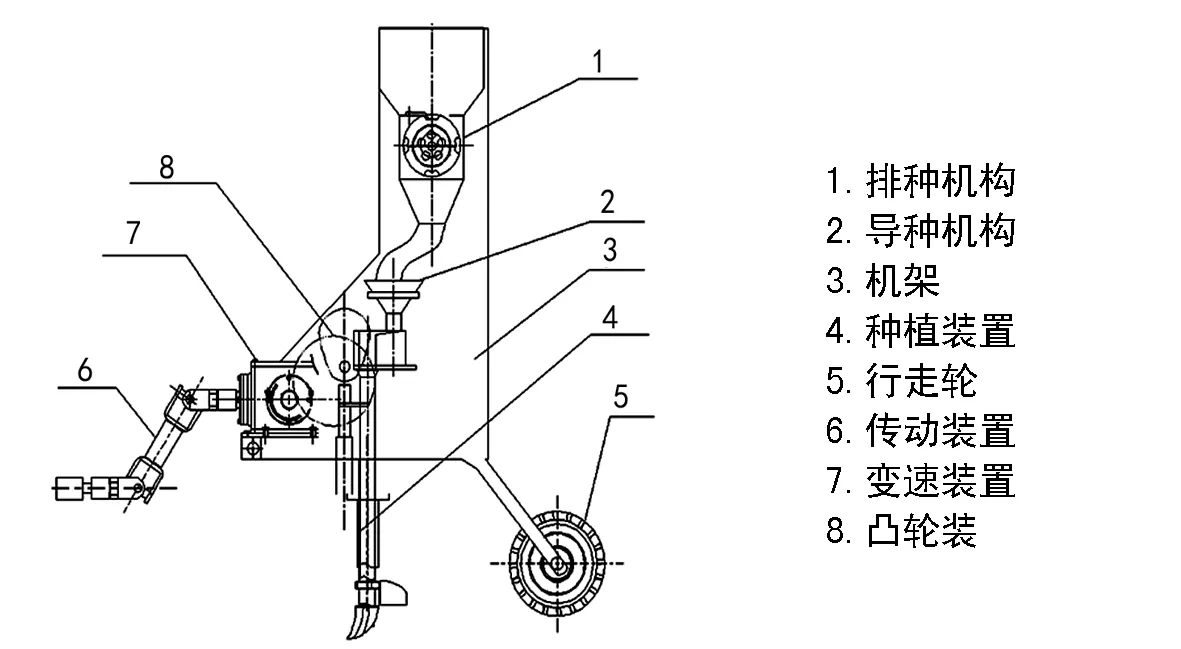
图1 大蒜播种机结构简图
1.3 工作原理
拖拉机提供动力,通过减速器将动力传递给锥齿轮换向器,换向器通过V形皮带轮带动机器工作,集蒜箱中的蒜种通过排种器转动将蒜种带入螺旋导种管,在蒜瓣自重和摩擦力的作用下能够保证蒜瓣鳞芽朝上根部朝下。经过碗形漏斗的进一步调整后落入筛种板孔内。凸轮机构偏心轮转动带动筛种板实现间歇式往复运动,当筛种板孔、筛种板支架孔、漏斗接盘三孔同心时,直立的大蒜通过筛种板进入导种管,凸轮下压弹簧支架,弹簧压缩,导种管伸入开沟器开好的土沟,同时固定在导种管上的片状弹簧爪摆脱外管的约束,张开并释放蒜瓣。随着凸轮机构转动,导种管上升,土壤由覆土器推动完全盖住大蒜,同时弹簧爪受外管约束闭合,封住导种管。如此反复实现大蒜机械化种植,稳定高效提高大蒜的播种效率和蒜种的出芽率。工作过程如图2所示。

图2 大蒜播种机工作图
2 主要技术原理分析
2.1 排种装置
排种装置如图3所示,由集蒜箱、遮板、排种轴、排种盒、带轮组成[10]。集蒜箱呈长方形斗状,下部用螺钉固定有遮板,遮板呈弧线下弯状,防止蒜种挤压破损;排种装置由排种轴、10个排种勺、10个排种盒组成,排种勺呈圆柱状,上开4个蒜瓣月牙形凹槽,通过排种轴串联装于排种盒中,蒜种落入其中,随带轮转动落入螺旋导种管中。排种盒顶部用螺钉安装在集蒜箱底部。
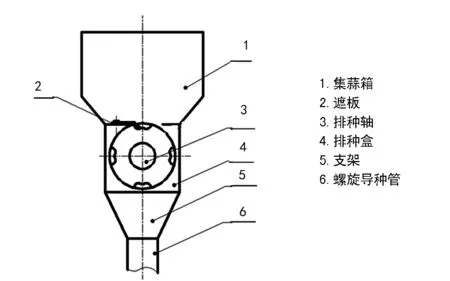
图3 排种装置
2.2 导种装置
导种装置的作用是为了调整大蒜的入土朝向,从而达到鳞芽朝上根向下的目的。图4所示为导种装置图,其装置包括螺旋导种管、漏斗接盘、凸轮机构、导种管,螺旋导种管负责蒜种的方向调整,凸轮机构控制每次下落一个蒜种,导种管负责蒜种的种植,凸轮机构由带轮转动。螺旋导种管包括支架、螺旋导种管、漏斗接盘、漏斗支架,螺旋导种管通过支架固定在排种盒上,开口与排种盒相同,带一定斜度的螺旋导种管能在蒜种下落过程中通过摩擦力和蒜瓣的重力调整大蒜方向,在一定的距离内实现方向调整,使落入漏斗接盘的蒜种鳞芽向上根向下,漏斗接盘和漏斗支架承接落下的蒜种并与筛种板孔配合。筛种板开有10个蒜种孔,4个凸轮凹槽在机架上随凸轮运动。
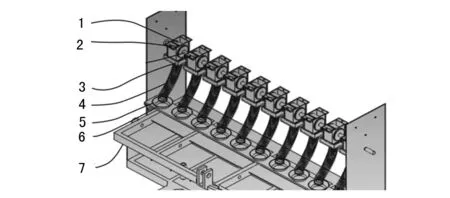
图4 导种装置1.排种轴 2.排种盒 3.支架 4.螺旋导种管 5.漏斗 6.漏斗支架 7.筛种板
通过日常观察和实验发现,由于蒜瓣形状特殊,让蒜瓣经过碗状形状,能很大概率的实现鳞芽朝上,为了补充螺旋导种管调向率不高的问题,本设计根据这一特点设计了锥形漏斗接盘,蒜瓣经过螺旋导种管调向,再落入漏斗接盘,下落期间经过漏斗斜面,能起到很好的定向作用,导种装置结构如图5所示。但是漏斗斜面斜度的大小,需要实验取到精确的角度,才能保证95%以上蒜芽向上。凸轮机构偏心轮转动带动筛种板实现间歇式往复运动,当筛种板孔、筛种板支架孔、漏斗接盘三孔同心时,直立的大蒜通过筛种板进入导种管。
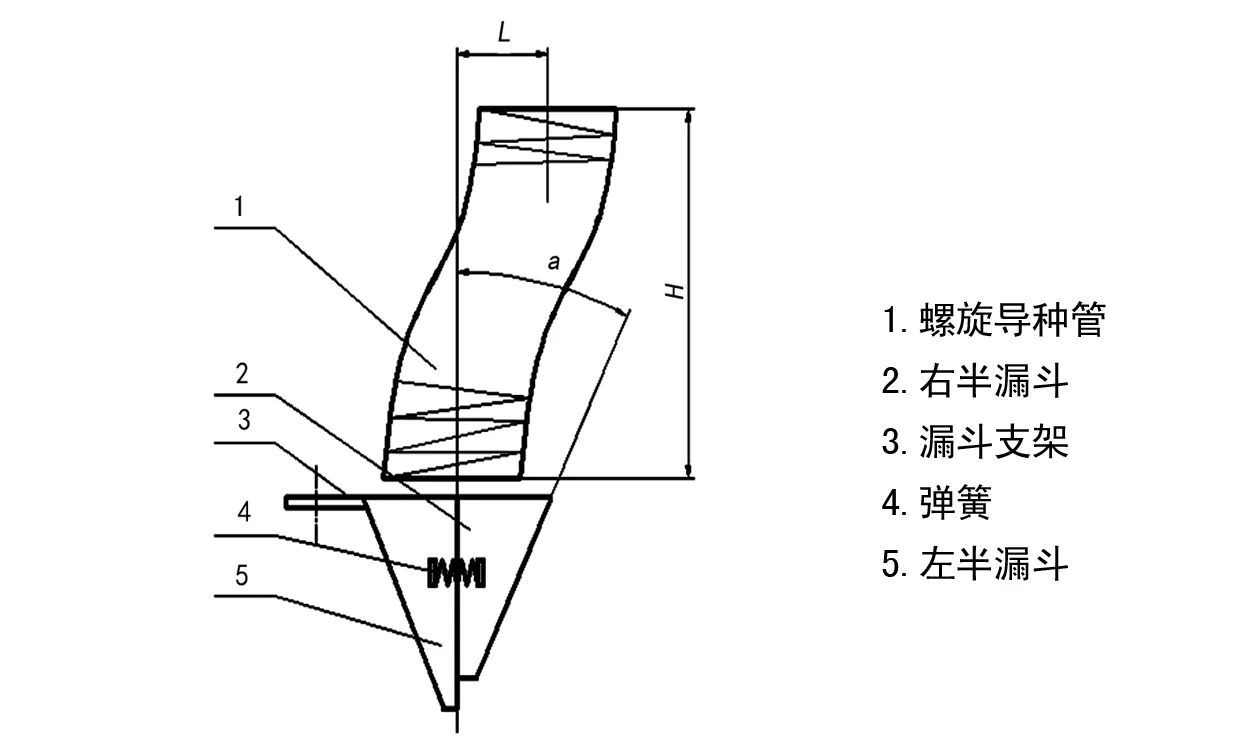
图5 导种装置结构图
3 导种装置调向实验
3.1 实验对象
蒜种导向装置是解决蒜牙向上技术的核心部件,其结构尺寸决定了种植过程中蒜牙向上入土的合格率。通过与安盛机械有限公司展开合作,选择山东大蒜品种作为试验对象,所选蒜种长度尺寸为31±3.6 mm,宽度为21.3±3.9 mm,高度19.5±4.4 mm,利用导种实验台开展实验,如图6所示。
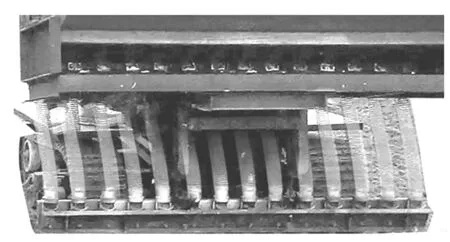
图6 试验台
蒜种在下落过程中,受重力和螺旋管壁的摩擦力影响,在一定距离内能实现蒜瓣方向的调整,其上下螺旋管口水平距离L、螺旋管高度H影响蒜瓣调向的效果,漏斗面倾斜角a对下落蒜瓣的调正起到很大的作用。实验的目的是明确这三个结构尺寸对蒜瓣调向的影响规律,并取得最优结构数据组合,达到最佳的蒜瓣调正效果。
3.2 实验方法
选择蒜瓣向上合格率K为试验测试指标,上下螺旋管口水平距离L、螺旋管高度H、漏斗面倾斜角a为试验因素,利用Design-Expert软件采用Box-Behnken二次回归正交组合试验,水平参数见表1、实验结果统计见表2。
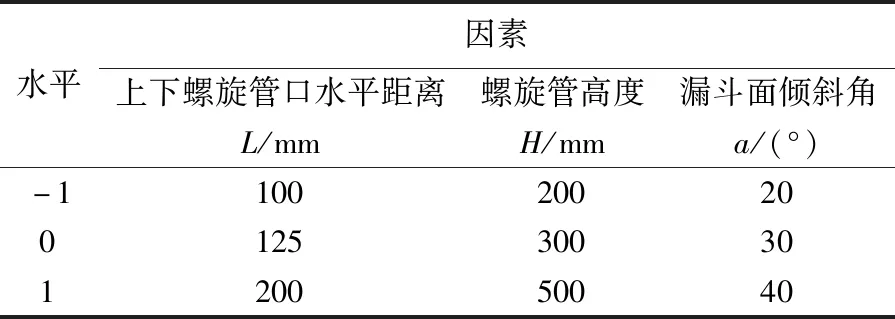
表1 试验因素和水平表
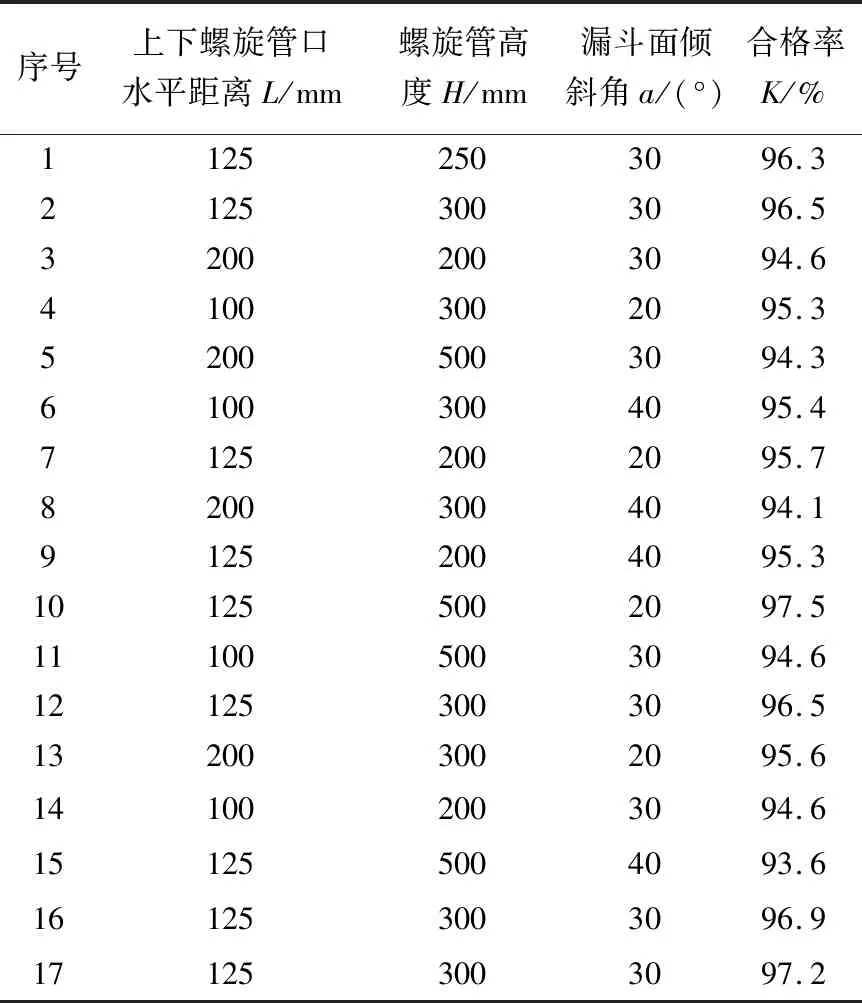
表2 实验数据
3.3 试验结果分析
(1) 方差分析:根据实验数据,利用Design-Expert进行二次多元回归拟合,其方差分析的结果见表3。主效应实验因素对播种合格率的影响显著性依次为:螺旋管高度H>上下螺旋管口水平距离L>漏斗面倾斜角a。交互因素影响显著性为Ha。
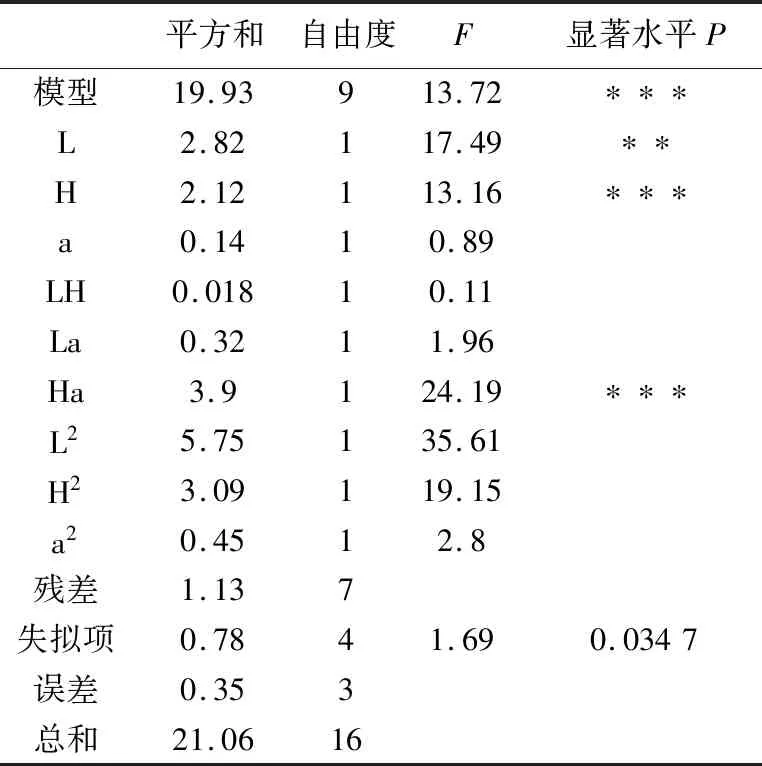
表3 方差分析结果
(2) 响应面分析:利用Design-Expert软件的分析功能进行交互响应曲面分析,固定某一个因子为0水平,得到其交互响应曲面如图7(a)、图7(b)、图7(c)。
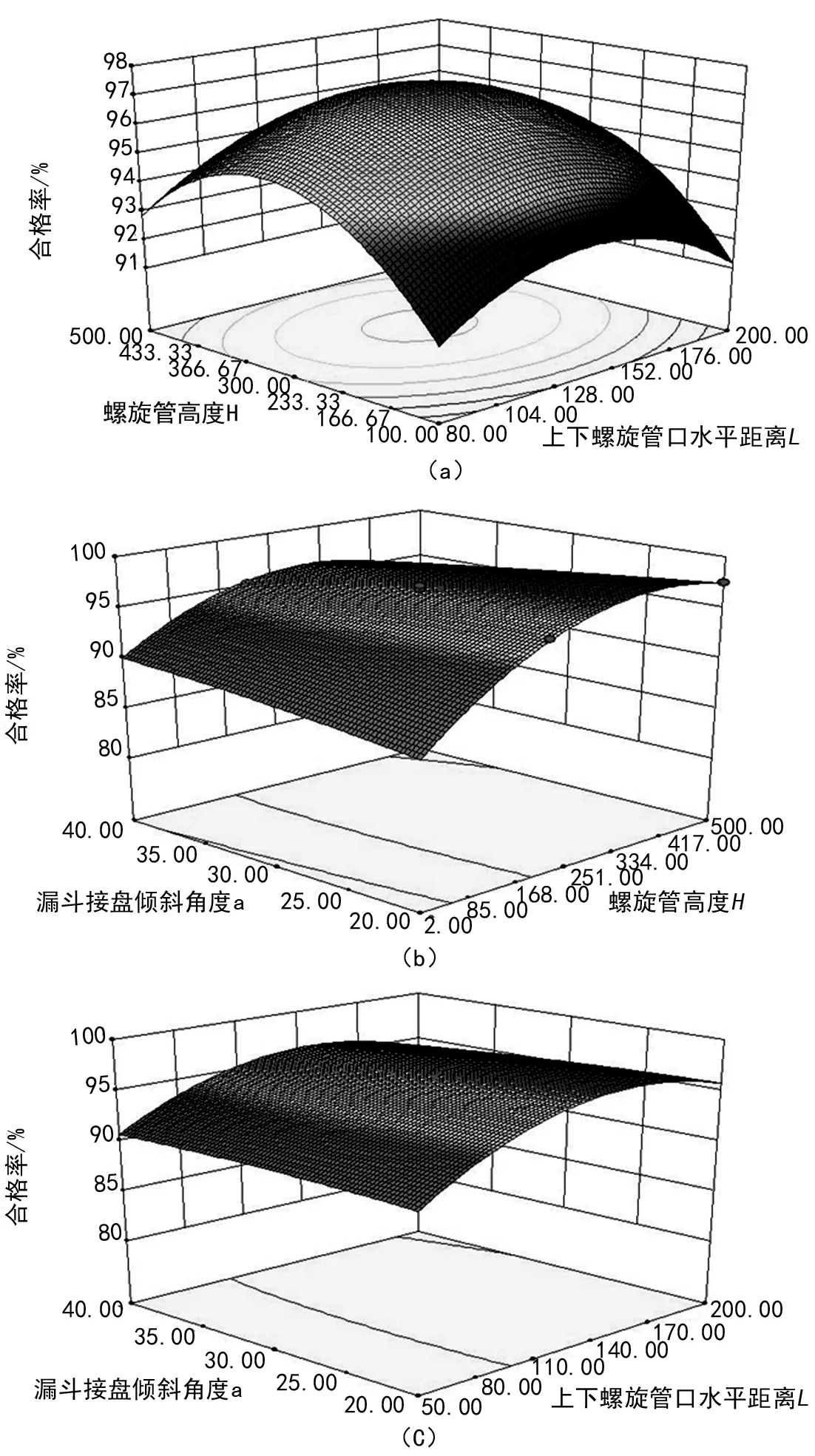
图7 交互响应曲面
从图7(a)中我们得出漏斗面倾斜角a=30°时,随着上下螺旋管口水平距离L和螺旋管高度H增大,合格率K先增大后减小,螺旋管高度H对合格率K的影响显著;从图7(b)中我们得出当上下螺旋管口水平距离L=125时,随着螺旋管高度H和漏斗面倾斜角a增大,合格率K先增大后减小,螺旋管高度H对合格率K的影响显著;从图7(c)中我们得出当螺旋管高度H=300时,随着上下螺旋管口水平距离L和漏斗面倾斜角a增大,合格率K先增大后减小,螺旋管口水平距离L对合格率K的影响显著。
(3) 结构参数优化:利用参数优化模块设置合格率最佳为100%,得到优化后的数据为:上下螺旋管口水平距离L=150.9 mm,螺旋管高度H=418.6 mm,漏斗面倾斜角a=20°,合格率为98.02%。
4 田间试验
本设计通过了国家发明专利授权,与安盛机械有限公司合作样机试制与试验,并对机构不断改善优化。通过软件三维建模和虚拟装配,对关键零部件图纸进行完善并制作样机后,进行了样机田间试验。随机从市场上购买同一品种蒜种作为田间试验样本,经过人工形状筛选后选定1 000个蒜种,分10批次进行试验。根据《大蒜生产技术规范》技术要求,试验场地为沙土,土壤的含水量在10%,硬度在0.55 MPa,上下螺旋管口水平距离L=150.9 mm,螺旋管高度H=418.6 mm;漏斗面倾斜角a=20°,重点分析检验大蒜播种机选种、导向、播种入土后的直立状态。
场地试验分10组,每次100粒蒜种,播种完成后采取平均值计算统计大蒜蒜牙向上的合格率。播种实验过程中将蒜种略微倾斜的样本纳入合格范围,最终的统计结果为97.21%,与试验数据基本符合,能保证大蒜直立种植农艺要求。
5 结 语
通过理论研究,利用大蒜自重下落调正的原理,采用螺旋导种管和漏斗接盘二次导种装置,能有效调整大蒜鳞牙向上。
导种过程中上下螺旋管口水平距离L、螺旋管高度H、漏斗面倾斜角a对导种合格率影响较大,通过Design-Expert软件进行多因素正交实验,进行了结构参数优化,确定最佳参数组合为:上下螺旋管口水平距离L=150.9 mm,螺旋管高度H=418.6 mm;漏斗面倾斜角a=20°,得到理论播种合格率为98.02%。通过场地实验,结果与理论结果基本一致,符合大蒜播种机农艺要求。
